1.本实用新型涉及六足机器人技术领域,具体地,涉及一种适用于水下潜行的六足机器人。
背景技术:
2.随着科技的进步,对机器人的不断研究,使得机器人在资源勘测、灾害救援、科学考察等领域具有广泛应用,尤其是水下勘测时,水下环境复杂,危险性极高,采用机器人取代人工,具有重要意义。
3.现有的水下机器人能在水中移动,进行水体勘查,但是水下环境复杂,时常伴有障碍物,水下机器人在工作过程中难以避开障碍物,同时,水下航行的机器人无法自由控制其航行方向,无法满足水下机器人的多样化需求。
技术实现要素:
4.针对现有技术中存在的问题,本实用新型提供了一种适用于水下潜行的六足机器人,该六足机器人通过气囊调整六足机器人在水中潜行的深度,通过左前足、左中足、左后足、右前足、右中足、右后足来调整六足机器人在水中的潜行方向。
5.为实现上述目的,本实用新型采用如下技术方案:一种适用于水下潜行的六足机器人,包括:防水壳体、摄像头、声呐、左前足、左中足、左后足、右前足、右中足、右后足、气动装置、气囊、控制系统,所述防水壳体的内部设有摄像头、声呐、气动装置、气囊、控制系统,所述气动装置与气囊连接,气囊的底部设有排水口穿出防水壳体;所述控制系统分别与摄像头、声呐、气动装置连接,所述防水壳体的两侧设有左前足、左中足、左后足、右前足、右中足、右后足。
6.进一步地,所述控制系统的型号为jmdm-32diomr。
7.进一步地,所述控制系统的第一i/o接口与摄像头连接,所述控制系统的第二i/o接口与声呐连接,所述控制系统的第三i/o接口与气动装置连接。
8.进一步地,所述左前足、左中足、左后足、右前足、右中足、右后足均包括:驱动电机、螺旋桨、小腿杆、关节、大腿杆和舵机,所述大腿杆的一端与舵机连接,所述大腿杆的另一端通过关节与小腿杆的一端连接,所述小腿杆的另一端与螺旋桨连接,所述螺旋桨中设有驱动电机。
9.进一步地,所述左前足的舵机与控制系统的第四i/o接口连接,所述左中足的舵机与控制系统的第五i/o接口连接,所述左后足的舵机与控制系统的第六i/o接口连接,所述右前足的舵机与控制系统的第七i/o接口连接,所述右中足的舵机与控制系统的第八i/o接口连接,所述右后足的舵机与控制系统的第九i/o接口连接。
10.进一步地,所述左前足的驱动电机与控制系统的第十i/o接口连接,所述左中足的驱动电机与控制系统的第十一i/o接口连接,所述左后足的驱动电机与控制系统的第十二i/o接口连接,所述右前足的驱动电机与控制系统的第十三i/o接口连接,所述右中足的驱
动电机与控制系统的第十四i/o接口连接,所述右后足的驱动电机与控制系统的第十五i/o接口连接。
11.进一步地,所述小腿杆和大腿杆上均设有小孔。
12.与现有技术相比,本实用新型具有如下有益效果:本实用新型六足机器人通过控制系统控制气动装置对气囊进行充气或放气,利用内外压差,给气囊进行补水或放水,使得六足机器人潜行到所需的深度;左前足、左中足、左后足、右前足、右中足、右后足分别由一个舵机独立控制,使得六足机器人的六足在水中滑移;通过驱动电机来驱动螺旋桨,使得六足机器人在水中滑移加速。本实用新型六足机器人具有结构简单、移动迅速、便于潜行的特点。
附图说明
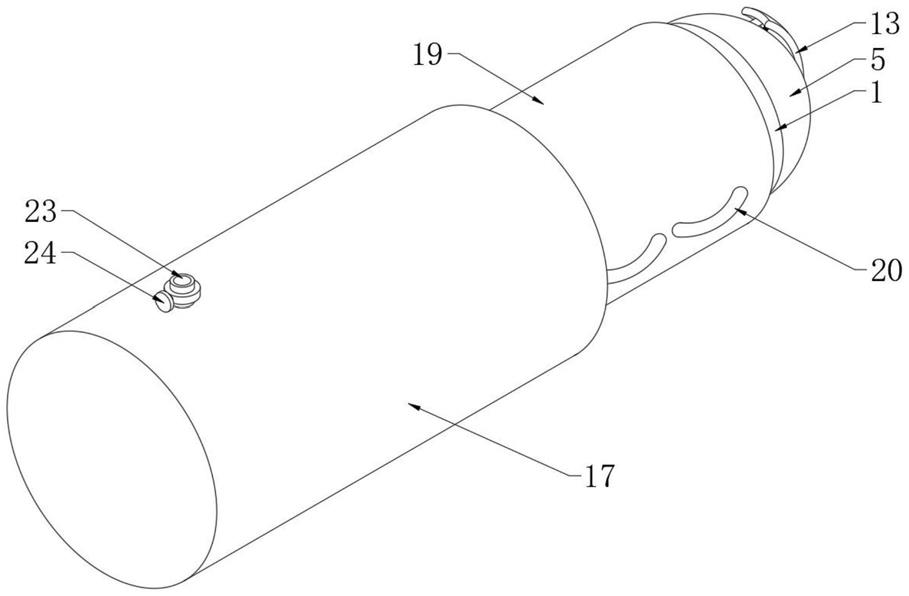
13.图1为本实用新型适用于水下潜行的六足机器人的结构示意图;
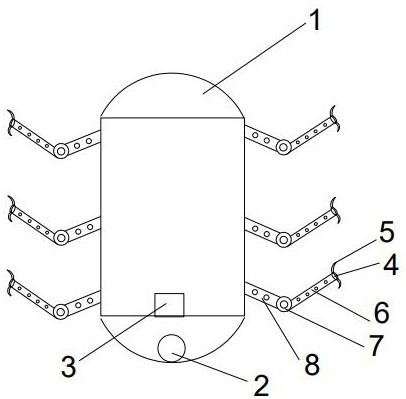
14.图2为本实用新型中防水内壳内部的剖视图;
15.1-防水外壳,2-摄像头,3-声呐,4-驱动电机、5-螺旋桨、6-小腿杆、7-关节、8-大腿杆、9-气动装置、10-气囊、11-控制系统、12-舵机。
具体实施方式
16.下面结合附图对本实用新型的技术方案作进一步地解释说明。
17.如图1为本实用新型适用于水下潜行的六足机器人的结构示意图,该六足机器人包括:防水壳体1、摄像头2、声呐3、左前足、左中足、左后足、右前足、右中足、右后足、气动装置9、气囊10、控制系统11,防水壳体1的内部设有摄像头2、声呐3、气动装置9、气囊10、控制系统11,气动装置9与气囊10连接,气囊10的底部设有排水口穿出防水壳体1;控制系统11分别与摄像头2、声呐3、气动装置9连接,防水壳体1的两侧设有左前足、左中足、左后足、右前足、右中足、右后足。本实用新型的六足机器人通过气囊10中的储水量实现在水中的沉浮,通过左前足、左中足、左后足、右前足、右中足、右后足控制六足机器人在水中的移动方向,从而使得该六足机器人能够适用于水下潜行,便于水下资源勘查。
18.本实用新型中的控制系统11的型号为jmdm-32diomr,控制系统11的第一i/o接口与摄像头2连接,通过摄像头2拍摄六足机器人在水中潜行时的水质画面,通过控制系统11保存,便于六足机器人出水后进行查看;控制系统11的第二i/o接口与声呐3连接,通过声呐3探测水下潜行的六足机器人周边是否存在障碍物,并将探测信号传送给控制系统11;控制系统11的第三i/o接口与气动装置9连接,当六足机器人放置到水中需要下潜时,控制系统11控制气动装置9对气囊10进行充气,气囊10利用气囊内部与防水壳体1外侧的水压差,使得水进入气囊10的内部,以增加六足机器人的质量,使其潜入水中;当水下潜行的六足机器人周边存在障碍物时,控制系统11控制气动装置9对气囊10进行排气,气囊10利用气囊内部与防水壳体1外侧的水压差,使得水从气囊10的内部排出,六足机器人的质量减轻,使其在水中的位置上移,避免了撞击障碍物。
19.本实用新型中左前足、左中足、左后足、右前足、右中足、右后足均包括:驱动电机4、螺旋桨5、小腿杆6、关节7、大腿杆8和舵机12,大腿杆8的一端与舵机12连接,大腿杆8的另一端通过关节7与小腿杆6的一端连接,小腿杆6的另一端与螺旋桨5连接,螺旋桨5中设有驱
动电机4。本实用新型通过舵机12的运行带动大腿杆8的摆动,大腿杆8的摆动通过关节7使得小腿杆6进行传动,从而实现左前足、左中足、左后足、右前足、右中足、右后足的摆动,使得六足机器人在水中移动;本实用新型通过驱动电机4带动螺旋桨5的转动,使得六足机器人能够在水中快速移动。本实用新型中的小腿杆6和大腿杆8上均设有小孔,使得六足机器人在潜行过程中的部分水流能够穿过小孔,减小小腿杆6和大腿杆8上的滑行阻力,延长小腿杆6和大腿杆8的使用时间。
20.本实用新型中的左前足、左中足、左后足、右前足、右中足、右后足中分别具有一个舵机和一个驱动电机,实现对左前足、左中足、左后足、右前足、右中足、右后足的独立控制;具体地,左前足的舵机与控制系统11的第四i/o接口连接,左中足的舵机与控制系统11的第五i/o接口连接,左后足的舵机与控制系统11的第六i/o接口连接,右前足的舵机与控制系统11的第七i/o接口连接,右中足的舵机与控制系统11的第八i/o接口连接,右后足的舵机与控制系统11的第九i/o接口连接,左前足的驱动电机与控制系统11的第十i/o接口连接,左中足的驱动电机与控制系统11的第十一i/o接口连接,左后足的驱动电机与控制系统11的第十二i/o接口连接,右前足的驱动电机与控制系统11的第十三i/o接口连接,右中足的驱动电机与控制系统11的第十四i/o接口连接,右后足的驱动电机与控制系统11的第十五i/o接口连接。
21.本实用新型适用于水下潜行的六足机器人的工作过程具体为:将六足机器人放入水中,控制系统11控制气动装置9给气囊10进行充气,气囊10利用气囊内与防水壳体1外侧的水压差,将水通过排水口进入气囊10的内部,使得六足机器人潜入水中,控制系统11分别控制左前足、左中足、左后足、右前足、右中足、右后足中的舵机12和驱动电机4运行,实现左前足、左中足、左后足、右前足、右中足、右后足的摆动以及螺旋桨5的转动,使得六足机器人在水中潜行,并通过摄像头2收集六足机器人水中潜行的视频,存储于控制系统11中。当声呐3探测到六足机器人周边具有障碍物时,将探测信号传送给控制系统11,控制系统11控制气动装置9对气囊10进行排气,气囊10利用气囊内部与防水壳体1外侧的水压差,使得水从气囊10的内部排出,六足机器人的质量减轻,使其在水中的位置上移,避免了撞击障碍物。本实用新型的六足机器人适用于水下潜行,具有结构简单、移动迅速的特点。
22.以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施方式,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。