技术特征:
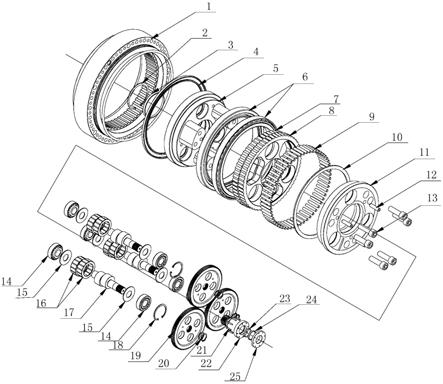
1.一种自动化智能机器人用底座摆线减速机,包括针壳(1)、孔用卡簧一(2)、包胶端盖(3)、骨架油封(4)、后行星架(5)、角接触轴承(6)、前行星架调整垫片(10)、前行星架(11)、圆锥销(12)、内六角螺钉一(13)和行星传动机构,其特征在于:所述包胶端盖(3)套接在后行星架(5)的左侧开口内,所述孔用卡簧一(2)卡接在包胶端盖(3)的左侧,所述后行星架(5)与角接触轴承(6)的左端插接,靠左侧的角接触轴承(6)垫在后行星架(5)与角接触轴承(6)之间,骨架油封(4)卡在后行星架(5)与角接触轴承(6)之间间隙内,前行星架(11)插接在针壳(1)的右端,所述前行星架(11)通过圆锥销(12)和内六角螺钉一(13)与后行星架(5)固定安装,所述前行星架调整垫片(10)垫在靠右侧的角接触轴承(6)与前行星架(11)之间;所述行星传动机构包括后摆线轮(7)、前摆线轮(8)、滚针(9)、圆锥滚子轴承(14)、偏心轴垫片(15)、钢保持架轴承(16)、偏心轴(17)、孔用卡簧二(18)、行星齿(19)、轴用卡簧(20)、内六角螺钉二(21)、输入齿轮轴(22)、输入齿轮轴涨紧套内圈(23)、输入齿轮轴涨紧套外圈(24)和输入齿轮轴压紧盘(25),所述后摆线轮(7)、前摆线轮(8)卡在针壳(1)的内侧,所述后摆线轮(7)、前摆线轮(8)与后行星架(5)的右侧卡接,所述滚针(9)卡在针壳(1)内侧并位于后摆线轮(7)、前摆线轮(8)外侧的间隙内,靠右端圆锥滚子轴承(14)通过孔用卡簧二(18)卡接在前行星架(11)的内部,钢保持架轴承(16)套接在后摆线轮(7)和前摆线轮(8)的内部,偏心轴(17)套接在钢保持架轴承(16)的内侧,所述偏心轴(17)的右端穿过偏心轴(17)并伸至前行星架(11)的右侧,行星齿(19)通过轴用卡簧(20)与偏心轴(17)的右端固定卡接,输入齿轮轴(22)与行星齿(19)啮合,输入齿轮轴涨紧套内圈(23)卡在输入齿轮轴(22)的内部并位于靠内侧的位置,所述输入齿轮轴涨紧套外圈(24)卡接在输入齿轮轴(22)的内部并位于靠外侧的位置,输入齿轮轴压紧盘(25)通过内六角螺钉二(21)与输入齿轮轴(22)的右端固定安装。2.根据权利要求1所述的一种自动化智能机器人用底座摆线减速机,其特征在于:所述行星齿(19)齿数为107个,模数为2,压力角为20
°
,齿宽为20mm。3.根据权利要求1所述的一种自动化智能机器人用底座摆线减速机,其特征在于:所述内六角螺钉二(21)齿数为22个,模数为2,压力角为20
°
,齿宽为26mm。4.根据权利要求1所述的一种自动化智能机器人用底座摆线减速机,其特征在于:所述偏心轴(17)偏心距为2.8mm。5.根据权利要求1所述的一种自动化智能机器人用底座摆线减速机,其特征在于:所述后摆线轮(7)、前摆线轮(8)齿数为57个,针齿套外径为φ12mm,偏心距为2.8mm,针轮中心圆直径为φ410mm,齿宽为35mm。6.根据权利要求1所述的一种自动化智能机器人用底座摆线减速机,其特征在于:所述滚针(9)外径为φ12mm,长度为70mm。7.根据权利要求1所述的一种自动化智能机器人用底座摆线减速机,其特征在于:所述针壳(1)齿数为58个,中心圆直径为φ410mm,针齿直径为φ12mm。
技术总结
本实用新型公开了一种自动化智能机器人用底座摆线减速机,包括针壳、孔用卡簧一、包胶端盖、骨架油封、后行星架、角接触轴承、前行星架调整垫片、前行星架、圆锥销、内六角螺钉一和行星传动机构,所述包胶端盖套接在后行星架的左侧开口内。该自动化智能机器人用底座摆线减速机,行星架采用柱式锥销连接结构,具有结构简单,加工方便,强度高等特点,同时,高精度锥销连接结构,可以保证加工及装配的同一性,还具有结构合理、体积小、效率高、成本低等特点,拓宽了RV减速机的适用范围,简化了结构设计,便于零件加工制造,降低了成本,同时具有效率高、重量轻、运转平稳、耐冲击、噪音低、过载能力强、寿命长等特点。寿命长等特点。寿命长等特点。
技术研发人员:黄志辉 耿建伟 郭斌 邓云庆 陈斌 易锐
受保护的技术使用者:珠海飞马传动机械有限公司
技术研发日:2021.10.21
技术公布日:2022/3/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。