1.本发明涉及管道检测技术领域的一种检测机器人,尤其是涉及一种三星轮式可自主越障的管道检测机器人。
背景技术:
2.管道作为一种运输通道已经遍布生活环境的各个角落,给我们的生活带来了便利,但同时管道在使用过程中也存在一些问题,如管道老化、腐蚀、堵塞等,而且很多管道的检测和维护工作很难进行。管道检测机器人的应用,可以有效的解决检测困难,提高管道检测和维护的工作效率。
技术实现要素:
3.为了解决背景技术中存在的问题,本发明的目的在于提供一种三星轮式可自主越障的管道检测机器人。
4.本发明技术方案如下:
5.本发明包括行走装置、摄像装置和机身;机身通过行走装置布置在地面上,摄像装置安装在机身上;
6.所述的摄像装置包括支架、摄像头、圆形电机和旋转电机,支架通过旋转电机可水平旋转地安装在机身上,摄像头通过圆形电机可俯仰旋转地安装在支架上;
7.所述的行走装置包括行星支架、电机、挡架、中心轴和传动轴;中心轴水平布置,中心轴一端铰接到机身侧面,中心轴另一端穿过挡架和行星支架的中心进行铰接;挡架和行星支架呈正三角形,挡架和行星支架平行间隔正对布置,挡架和行星支架在自身的三个角上均连接有一根传动轴,使得三根所述的传动轴形成以中心轴为中心沿周向间隔均布的结构;每根传动轴上活动套装有带轮,带轮上套装车轮,三个传动轴上的带轮之间通过同步带传动连接,电机安装在挡架内表面上并与其中一根传动轴相连。
8.每相邻两个传动轴之间均设有张紧轴,张紧轴两端均分别连接到挡架和行星支架上,每根张紧轴上均活动套装有张紧轮,张紧轮和同步带接触传动连接,三根所述的张紧轴也形成以中心轴为中心沿周向间隔均布的结构。
9.所述的传动轴到中心轴的径向距离大于张紧轴到中心轴的径向距离。
10.所述的挡架和行星支架之间的传动轴上活动套装有带轮,带轮在靠近车轮的端面沿轴向延伸设置同轴套筒,同轴套筒通过键和车轮同轴套装连接。
11.所述的挡架外周围为设有用于包裹带轮的一圈挡边。
12.所述的摄像装置布置在机身的前部上端面。
13.包括四个所述的行走装置,四个行走装置分别安装在机身的前部和后部的两侧。
14.本发明的有益效果为:
15.本发明可实现管道检测机器人主动越障,能够观测到管道内部各处情况,可以适应较为恶劣的检测环境,可以有效地解决检测困难,提高管道检测和维护的工作效率。
附图说明
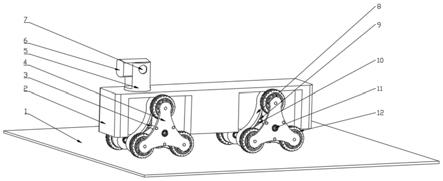
16.图1为本发明的立体视图;
17.图2为本发明的行走装置示意图;
18.图3为本发明的行走装置内部结构示意图;
19.图4为本发明的摄像装置示意图;
20.图5为本发明的机身结构示意图;
21.图6为本发明工作过程的各个状态图。
22.图中所示:1-地面,2-机身,3-张紧轴,4-行星支架,5-支架,6-摄像头,7-圆形电机,8-档架,9-张紧轮,10-同步带,11-中心轴,12-车轮,13-带轮,14-电机,15-旋转电机,16-传动轴。
具体实施方式
23.下面结合附图及具体实施对本发明作进一步详细说明。
24.如图1所示本发明包括行走装置、摄像装置和机身2;机身2通过行走装置布置在地面1上方,摄像装置安装在机身2上。
25.如图1和图4所示,摄像装置包括支架5、摄像头6、圆形电机7和旋转电机15,支架5通过旋转电机15可水平旋转地安装在机身2上,使得旋转电机15可以控制支架5在水平面内进行圆周转动,具体地,旋转电机15机体安装在机身2上,支架5安装在旋转电机15的输出轴上,摄像头6通过圆形电机7可俯仰旋转地安装在支架5上,使得电机7控制摄像头6在一个竖直面内进行转动。
26.具体地,支架5呈u形,摄像头6两侧均通过一个圆形电机7和支架5u形的两个分支端铰接;更具体地,两个圆形电机7机体安装在支架5u形的两个分支端内侧面上,摄像头6安装在圆形电机7的输出轴上,摄像头6两侧分别连接两个圆形电机7的输出轴。因此,旋转电机15工作可使摄像装置整体在水平面内旋转,圆形电机7工作可带动摄像头6在竖直方向上摆动,旋转电机15和圆形电机7配合,可满足摄像装置在各个方向上的转动需求。摄像装置布置在机身2的前部上端面。
27.如图1所示,本发明包括四个行走装置,四个行走装置分别安装在机身2的前部和后部的两侧。如图2所示,行走装置包括行星支架4、电机14、挡架8、中心轴11和传动轴16;中心轴11水平布置,中心轴11一端通过轴承铰接到机身2侧面,中心轴11另一端穿过挡架8通过轴承和行星支架4的中心进行铰接;通过中心轴11将行走装置和机身4进行连接实现了行走装置的悬挂布置。
28.如图3所示,挡架8和行星支架4呈正三角形,挡架8和行星支架4平行间隔正对布置,挡架8和行星支架4在自身的三个角上均通过轴承连接有一根传动轴16,三个角上的传动轴16形成以中心轴11为中心沿周向间隔均布的结构,每根传动轴16上活动套装有带轮13和车轮12,三个传动轴16上的带轮13之间通过同步带10传动连接形成同步带传动副,每相邻两个传动轴16之间均设有张紧轴3,张紧轴3两端均分别通过轴承连接到挡架8和行星支架4上,每根张紧轴3上均活动套装有张紧轮9,张紧轮9和同步带10接触传动连接,用于对同步带10进行张紧。三根张紧轴3形成以中心轴11为中心沿周向间隔均布的结构。且传动轴16到中心轴11的径向距离大于张紧轴3到中心轴11的径向距离。
29.如图3所示,挡架8和行星支架4之间的传动轴16上活动套装有带轮13,带轮13在靠近车轮12的端面沿轴向延伸设置同轴套筒,同轴套筒一端和带轮13同轴固定连接,同轴套筒另一端通过键和车轮12同轴套装连接。
30.挡架8外周围设有用于包裹带轮13的一圈挡边。使得带轮13和车轮12同时可以随着传动轴16的转动进行圆周运动。电机14固定安装在挡架8内表面上并与其中一根传动轴16相连。则电机14启动工作时,会带动其中与之相连的传动轴16及传动轴16上的带轮13旋转,与带轮13进行啮合的同步带10因此发生滑动,进而带动另外两个与同步带10啮合的带轮13进行旋转,最终带动机器人前行。
31.具体实施中,管道检测机器人在正常运行时,行走装置中的电机14开始工作,带动传动轴16上的带轮13和车轮12转动,带轮13和同步带10啮合带动另外两根传动轴旋转,从而带动另外两个车轮旋转。运动通过中心轴传递到机身2上,使管道检测机器人整体向前运动。
32.具体实施中,管道检测机器人在运行过程中碰到障碍物时,按照以下方式越障:
33.当机身4前部的行走装置中的车轮接触并抵住障碍物时,则驱动机身4后部的行走装置中的车轮继续运行推动机器人整体向前运动,机身4前部的行走装置中,以抵住障碍物的车轮所在的传动轴为中心,另未抵住障碍物的两根传动轴绕中心轴旋转,带动整个机器人翻越障碍物。
34.当机身4后部的行走装置中的车轮接触并抵住障碍物时,则驱动机身4前部的行走装置中的车轮继续运行推动机器人整体向后运动,机身4后部的行走装置中,以抵住障碍物的车轮所在的传动轴为中心,另未抵住障碍物的两根传动轴绕中心轴旋转,带动整个机器人翻越障碍物。
35.本发明未尽事宜为公知技术。
36.上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
