1.本发明涉及压电驱动领域,尤其涉及一种预压力动态监测的双向压电粘滑作动器及其工作方法。
背景技术:
2.压电粘滑作动器装置是一种基于逆压电效应的传动装置,因其相应速度快、精度高等特点,在生物、机器人及机械制造等领域具有极其广泛的应用,特别是微纳操控的应用中。但是,目前应用仍旧较少,主要问题是运动稳定性较差,受预压力影响较为严重,会导致摩擦状态发生实时变化,导致对此问题的研究也较少出现。因此,如何装配和施加预压力成了直线压电作动器进一步拓宽应用范围、提高装置性能所面临的主要工程问题。
技术实现要素:
3.本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种预压力动态监测的双向压电粘滑作动器及其工作方法。
4.本发明为解决上述技术问题采用以下技术方案:一种预压力动态监测的双向压电粘滑作动器,包含基座、圆柱滚子直线导轨、作动轴、以及第一至第二驱动模块;所述作动轴呈条状、通过所述圆柱滚子直线导轨和所述基座相连,使得作动轴能够沿所述圆柱滚子直线导轨自由滑动;所述第一、第二驱动模块结构相同,均包含滑台、微分尺、微分尺固定座、力传感器、力传感器固定座、驱动组件固定座、压电驱动组件;所述滑台包含基板和滑板,其中,所述基板上端面设有若干平行的滑轨;所述滑板下端面设有若干和所述基板上滑轨一一对应的滑槽;所述滑板和基板相互配合,使得滑板平行于基板且能够相对基板沿基板上的滑轨自由滑动;所述微分尺固定座和所述基板固连,其上设有用于固定所述微分尺的安装孔;所述微分尺固定在微分尺固定座的安装孔中,其输出轴和所述力传感器的输入端固连;所述力传感器通过力传感器固定座固定在所述滑板上,其输入端平行于基板上的滑轨,用于感应微分尺在基板滑轨方向施加给滑板的力的大小;所述压电驱动组件包含壳体、压电叠堆、传动件、碟簧和驱动足,其中,所述壳体为一端封闭另一端中心设有通孔的空心柱体;所述传动件包含底盘和传动杆;所述底盘呈圆盘状,设置在壳体内;所述传动杆一端和底盘同轴固连,另一端从壳体设有通孔的一端伸出后和所述驱动足固连;所述碟簧套在传动杆上,一端和壳体内壁相抵,另一端和传动件的底盘相抵;所述压电叠堆设置在壳体内,一端和壳体的封闭端固连,另一端和所述传动件的底盘固连;所述压电驱动组件的壳体通过驱动组件固定座固定在所述滑板上;所述第一、第二驱动模块的基板均固定在所述基座上,第一、第二驱动模块基板上
的滑轨均垂直于作动轴,第一、第二驱动模块压电驱动组件的驱动足均和作动轴相抵,第一、第二驱动模块压电驱动组件的传动杆和作动轴之间的夹角均不是直角且开口方向相反。
5.作为本发明一种预压力动态监测的双向压电粘滑作动器进一步的优化方案,所述作动轴和第一、第二驱动模块的驱动足相接触的一面设有陶瓷材料制成的摩擦层,以提高摩擦性能和耐磨性。
6.本发明还公开了一种该预压力动态监测的双向压电粘滑作动器其工作方法,包含以下步骤:如果需要驱动作动轴正向运动:步骤a.1),调整第一、第二驱动模块的微分尺, 使得第一、第二驱动模块的驱动足均向作动轴施加预压力fn;步骤a.2),采用上升的三角波驱动第一压电驱动模块中压电驱动组件的压电叠堆t1秒,使其伸长l1,同时控制第一压电驱动模块中压电驱动组件的压电叠堆保持原长,此时作动轴在静摩擦力的作用下被第一压电驱动模块中压电驱动组件正向推动x1的距离;步骤a.3),采用下降的三角波驱动驱动第一压电驱动模块中压电驱动组件的压电叠堆t2秒,使其收缩回原长,t2小于t1,作动轴在滑动摩擦力的作用下被第一压电驱动模块中压电驱动组件反向拉动距离x2;步骤a.4),重复执行步骤a.2)至步骤a.3),使得作动轴连续正向粘滑步进,每个周期的步进长度为x
1-x2;如果需要驱动作动轴反向运动:步骤b.1),调整第一、第二驱动模块的微分尺, 使得第一、第二驱动模块的驱动足均向作动轴施加预压力fn;步骤b.2),采用上升的三角波驱动第二压电驱动模块中压电驱动组件的压电叠堆t1秒,使其伸长l1,同时控制第二压电驱动模块中压电驱动组件的压电叠堆保持原长,此时作动轴在静摩擦力的作用下被第二压电驱动模块中压电驱动组件反向推动x1的距离;步骤b.3),采用下降的三角波驱动第二压电驱动模块中压电驱动组件的压电叠堆t2秒,使其收缩回原长,t2小于t1,作动轴在滑动摩擦力的作用下被第二压电驱动模块中压电驱动组件正向拉动距离x2;步骤b.4),重复执行步骤b.2)至步骤b.3),使得作动轴连续反向粘滑步进,每个周期的步进长度为x
1-x2。
7.作为该基于柔铰结构的轮式预压型低频压电作动器的工作方法进一步的优化方案,所述t1:t2=9:1。
8.本发明采用以上技术方案与现有技术相比,具有以下技术效果:1. 本发明通过设置两组方向相反的压电驱动模块,达到正向、反向的双向运动输出,装置的输出行程可根据选择不同数量的压电驱动模块或滑块行程进行调整;2. 本发明将力传感器集成至粘滑驱动器预压力机构和压电驱动模块之间,从而达到预压力实时监测的作用,对于粘滑驱动器装配过程的微调整有一定指导价值。
9.3.本发明由于将力传感器集成至作动器中,可以动态检测运动过程预压力的变化情况,对于研究人员探究不同参数对预压力的影响,或预压力对输出性能的影响带来了极
大的便利,且装配简单,具有一定的市场价值。
附图说明
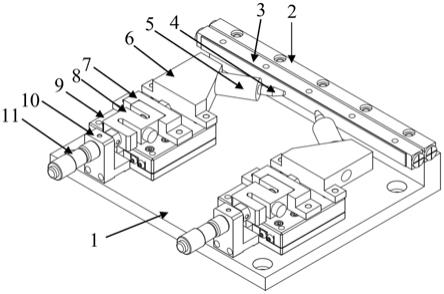
10.图1是本发明的结构示意图;图2是本发明中压电驱动组件的结构示意图;图3是本发明的驱动原理图;图4是本发明中驱动三角波的示意图。
11.图中,1-基座,2-圆柱滚子直线导轨,3-作动轴,4-驱动足,5-压电驱动组件,6-驱动组件固定座, 7-力传感器固定座,8-力传感器,9-滑台,10-微分尺固定座,11-微分尺,12-碟簧,13-壳体,14-压电叠堆,15-传动件。
具体实施方式
12.下面结合附图对本发明的技术方案做进一步的详细说明:本发明可以以许多不同的形式实现,而不应当认为限于这里所述的实施例。相反,提供这些实施例以便使本公开透彻且完整,并且将向本领域技术人员充分表达本发明的范围。在附图中,为了清楚起见放大了组件。
13.如图1所示,本发明公开了一种预压力动态监测的双向压电粘滑作动器,包含基座、圆柱滚子直线导轨、作动轴、以及第一至第二驱动模块;所述作动轴呈条状、通过所述圆柱滚子直线导轨和所述基座相连,使得作动轴能够沿所述圆柱滚子直线导轨自由滑动;所述第一、第二驱动模块结构相同,均包含滑台、微分尺、微分尺固定座、力传感器、力传感器固定座、驱动组件固定座、压电驱动组件;所述滑台包含基板和滑板,其中,所述基板上端面设有若干平行的滑轨;所述滑板下端面设有若干和所述基板上滑轨一一对应的滑槽;所述滑板和基板相互配合,使得滑板平行于基板且能够相对基板沿基板上的滑轨自由滑动;所述微分尺固定座和所述基板固连,其上设有用于固定所述微分尺的安装孔;所述微分尺固定在微分尺固定座的安装孔中,其输出轴和所述力传感器的输入端固连;所述力传感器通过力传感器固定座固定在所述滑板上,其输入端平行于基板上的滑轨,用于感应微分尺在基板滑轨方向施加给滑板的力的大小;如图1、图2所示,所述压电驱动组件包含壳体、压电叠堆、传动件、碟簧和驱动足,其中,所述壳体为一端封闭另一端中心设有通孔的空心柱体;所述传动件包含底盘和传动杆;所述底盘呈圆盘状,设置在壳体内;所述传动杆一端和底盘同轴固连,另一端从壳体设有通孔的一端伸出后和所述驱动足固连;所述碟簧套在传动杆上,一端和壳体内壁相抵,另一端和传动件的底盘相抵;所述压电叠堆设置在壳体内,一端和壳体的封闭端固连,另一端和所述传动件的底盘固连;所述压电驱动组件的壳体通过驱动组件固定座固定在所述滑板上;所述第一、第二驱动模块的基板均固定在所述基座上,第一、第二驱动模块基板上的滑轨均垂直于作动轴,第一、第二驱动模块压电驱动组件的驱动足均和作动轴相抵,第一、第二驱动模块压电驱动组件的传动杆和作动轴之间的夹角均不是直角且开口方向相
反。
14.所述作动轴和第一、第二驱动模块的驱动足相接触的一面设有陶瓷材料制成的摩擦层,以提高摩擦性能和耐磨性。
15.第一、第二驱动模块中压电驱动组件的驱动电压采用调制后的三角波,在特殊的工况条件下也可以选择方波、梯形波及正弦波等波形进行替代。
16.驱动方法包括但不限于以下:如图3所示,如果需要驱动作动轴正向运动:步骤a.1),调整第一、第二驱动模块的微分尺, 使得第一、第二驱动模块的驱动足均向作动轴施加预压力fn;步骤a.2),采用上升的三角波驱动第一压电驱动模块中压电驱动组件的压电叠堆t1秒,使其伸长l1,同时控制第一压电驱动模块中压电驱动组件的压电叠堆保持原长,此时作动轴在静摩擦力的作用下被第一压电驱动模块中压电驱动组件正向推动x1的距离;步骤a.3),采用下降的三角波驱动驱动第一压电驱动模块中压电驱动组件的压电叠堆t2秒,使其收缩回原长,t2小于t1,作动轴在滑动摩擦力的作用下被第一压电驱动模块中压电驱动组件反向拉动距离x2;步骤a.4),重复执行步骤a.2)至步骤a.3),使得作动轴连续正向粘滑步进,每个周期的步进长度为x
1-x2;如果需要驱动作动轴反向运动:步骤b.1),调整第一、第二驱动模块的微分尺, 使得第一、第二驱动模块的驱动足均向作动轴施加预压力fn;步骤b.2),采用上升的三角波驱动第二压电驱动模块中压电驱动组件的压电叠堆t1秒,使其伸长l1,同时控制第二压电驱动模块中压电驱动组件的压电叠堆保持原长,此时作动轴在静摩擦力的作用下被第二压电驱动模块中压电驱动组件反向推动x1的距离;步骤b.3),采用下降的三角波驱动第二压电驱动模块中压电驱动组件的压电叠堆t2秒,使其收缩回原长,t2小于t1,作动轴在滑动摩擦力的作用下被第二压电驱动模块中压电驱动组件正向拉动距离x2;步骤b.4),重复执行步骤b.2)至步骤b.3),使得作动轴连续反向粘滑步进,每个周期的步进长度为x
1-x2。
17.如图4所示,三角波的上升和下降时间比一般大于7:3,即t1:t2一般大于7:3,优先取9:1。
18.本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
19.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
