1.本发明涉及一种运载火箭载荷设计方法,尤其涉及一种运载火箭疲劳载荷精细化赋值系统及方法。
背景技术:
2.目前,我国传统运载火箭结构静载荷计算采用质点梁模型,该模型没有考虑结构差异,多以静载荷加安全系数的方法给出,缺乏对载荷激励源的规律性研究,载荷设计条件往往趋于保守,得到的载荷结果精细化设计水平不高,不利于结构估重和刚度设计。
技术实现要素:
3.本发明的技术解决问题:克服现有技术的不足,提供一种运载火箭新型载荷设计系统及方法,建立更为精确的运载火箭三维载荷计算模型;研究三维流固疲劳载荷转换技术,能够真实反映结构质量和气动疲劳载荷的连续分布特性,实现气动网格节点载荷与结构有限元网格节点载荷的转换;进行疲劳载荷赋值结果后处理技术研究,为强度设计提供更细致的载荷输入;实现运载火箭降载荷条件,立足于运载火箭结构减重,从而提高运载能力。
4.本发明的技术解决方案:
5.基于三维模型的运载火箭疲劳载荷赋值系统,包括:运载火箭三维建模模块、气动疲劳载荷转换模块、疲劳载荷后处理模块;
6.运载火箭三维建模模块:建立运载火箭精细化的三维有限元模型;三维有限元模型能够模拟运载火箭结构形式、布局、质心、转动惯量和连接刚度。
7.气动疲劳载荷转换模块:获得上级输入的气动疲劳载荷,采用适用于运载火箭的气动疲劳载荷最小变形能转换算法,获得最小变形能;根据最小变形能获得疲劳载荷在三维有限元模型中相对质心的力和力矩完成赋值处理;
8.气动疲劳载荷转换模块获得最小变形能u的方法,具体为:
[0009][0010][0011]
[0012][0013]
其中,uj为有限元节点j的变形能;ej为假设梁的抗弯刚度;pj为有限元节点j的力;lj为有限元节点j到最近气动疲劳载荷节点的距离,即假设梁长度;pa为气动疲劳模型的合力;xj、yj、zj为有限元节点j的三方向坐标; xa、ya、za为气动疲劳载荷模型质心的三方向坐标;λ,λ
x
,λy,λz为拉格朗日乘子法建立极值函数中的乘子,n为有限元模型节点数。
[0014]
疲劳载荷后处理模块:根据疲劳载荷在三维有限元模型中相对质心的力和力矩,判定运载火箭的气动疲劳载荷转换算法是否满足使用要求。
[0015]
疲劳载荷后处理模块判定运载火箭的气动疲劳载荷转换算法是否满足使用要求的方法,具体为:
[0016]
21)计算相对运载火箭质心的气动疲劳载荷的合力f和合力矩m;
[0017]
22)根据疲劳载荷在三维有限元模型中相对质心的力和力矩,计算基于质心的有限元载荷合力和合力矩;
[0018]
23)获得气动疲劳载荷的合力与有限元载荷合力的差值x1,获得气动疲劳载荷的合力矩与有限元载荷合力矩的差值x2;
[0019]
24)若x1《0.5%f,且x2《0.5%m;则判定气动疲劳载荷转换算法满足使用要求;反之,则判定气动疲劳载荷转换算法不满足使用要求。
[0020]
一种基于三维模型的运载火箭疲劳载荷赋值方法,包括以下步骤:
[0021]
1)建立运载火箭的三维有限元模型,并进行网格划分;步骤1)中三维有限元模型模拟运载火箭真实的结构形式、布局、质心、转动惯量和连接刚度;
[0022]
2)获得上级输入的气动疲劳载荷,采用适用于运载火箭的气动疲劳载荷最小变形能转换算法,获得最小变形能;
[0023]
3)根据最小变形能获得疲劳载荷在三维有限元模型中相对质心的力和力矩,完成赋值处理;
[0024]
4)根据疲劳载荷在三维有限元模型中相对质心的力和力矩,判定运载火箭的气动疲劳载荷转换算法是否满足使用要求;如果不符合要求,重新划分网格并返回步骤1),直至运载火箭的气动疲劳载荷转换算法满足使用要求。
[0025]
本发明与现有技术相比的优点在于:
[0026]
(1)在重复使用运载火箭载荷设计中创新性采用了基于三维模型的疲劳载荷赋值方法,疲劳载荷赋值位置更精细,为运载火箭载荷设计提供了新型设计方法,为结构设计提供更精确的输入条件。
[0027]
(2)重复使用运载火箭复杂结构采用最小变形能疲劳载荷三维转换赋值方法,疲劳载荷转换偏差《0.5%,疲劳载荷赋值精度更高,为运载火箭结构减重设计提供了有利依据。
[0028]
(3)采用循环寻找距离气动点最近的有限元单元方法,可以加速设计迭代流程,提高了计算效率。
附图说明
[0029]
图1为运载火箭子级总装图。
[0030]
图2为运载火箭子级几何模型。
[0031]
图3为运载火箭子级有限元网格。
[0032]
图4为气动网格。
[0033]
图5为转换后的有限元节点疲劳载荷示意。图6为本发明方法流程图。
具体实施方式
[0034]
本发明基于三维模型的运载火箭疲劳载荷赋值系统,包括:运载火箭三维建模模块、气动疲劳载荷转换模块、疲劳载荷后处理模块。
[0035]
运载火箭三维建模模块:建立运载火箭精细化的三维有限元模型;三维有限元模型能够模拟运载火箭结构形式、布局、质心、转动惯量和连接刚度。
[0036]
气动疲劳载荷转换模块:获得上级输入的气动疲劳载荷,由于气动计算模型节点与精细化的三维有限元模型节点不一致,采用适用于运载火箭的气动疲劳载荷最小变形能转换算法,获得最小变形能;根据最小变形能获得疲劳载荷在三维有限元模型中相对质心的力和力矩完成赋值处理;
[0037]
气动疲劳载荷转换模块获得最小变形能u的方法,具体为:
[0038][0039][0040][0041]
[0042]
其中:uj为有限元节点j的变形能;ej为假设梁的抗弯刚度;pj为有限元节点j的力;lj为有限元节点j到最近气动疲劳载荷节点的距离,即假设梁长度;pa为气动疲劳模型的合力;xj、yj、zj为有限元节点j的三方向坐标;xa、ya、za为气动疲劳载荷模型质心的三方向坐标;λ,λ
x
,λy,λz为拉格朗日乘子法建立极值函数中的乘子,n为有限元模型节点数。
[0043]
疲劳载荷后处理模块:根据疲劳载荷在三维有限元模型中相对质心的力和力矩,判定运载火箭的气动疲劳载荷转换算法是否满足使用要求。对载荷计算结果数据进行快速批量处理,并以图形、图表、云图形式实现可视化显示和文本输出。
[0044]
疲劳载荷后处理模块判定运载火箭的气动疲劳载荷转换算法是否满足使用要求的方法,具体为:
[0045]
21)计算相对运载火箭质心的气动疲劳载荷的合力f和合力矩m;
[0046]
22)根据疲劳载荷在三维有限元模型中相对质心的力和力矩,计算基于质心的有限元载荷合力和合力矩;
[0047]
23)获得气动疲劳载荷的合力与有限元载荷合力的差值x1,获得气动疲劳载荷的合力矩与有限元载荷合力矩的差值x2;
[0048]
24)若x1《0.5%f,且x2《0.5%m;则判定气动疲劳载荷转换算法满足使用要求;反之,则判定气动疲劳载荷转换算法不满足使用要求。
[0049]
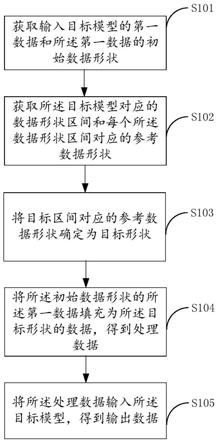
如图6所示,一种基于三维模型的运载火箭疲劳载荷赋值方法,包括以下步骤:
[0050]
1)建立运载火箭的三维有限元模型,并进行网格划分;以壳单元为主,网格尽量划分为规则四边形;步骤1)中三维有限元模型模拟运载火箭真实的结构形式、布局、质心、转动惯量和连接刚度;
[0051]
2)获得上级输入的气动疲劳载荷,采用适用于运载火箭的气动疲劳载荷最小变形能转换算法,获得最小变形能;
[0052]
3)根据最小变形能获得疲劳载荷在三维有限元模型中相对质心的力和力矩,完成赋值处理;
[0053]
4)根据疲劳载荷在三维有限元模型中相对质心的力和力矩,判定运载火箭的气动疲劳载荷转换算法是否满足使用要求;如果不符合要求,重新划分网格并返回步骤1),直至运载火箭的气动疲劳载荷转换算法满足使用要求(不同的重复循环是改变了网格划分,即三维有限元节点的三方向坐标,重复步骤1) ~3))。
[0054]
实施例
[0055]
(1)运载火箭三维建模模块
[0056]
运载火箭结构一般由非密封的壳段结构(尾段、过渡段、箱间段、级间段、仪器舱、整流罩等)以及箭上阀门、导管、气瓶和仪器电缆等部分组成。在建立运载火箭三维有限元模型时,根据研究需要,对各部段上的仪器、电缆等进行合理的等效简化,形成合适的有限元单元,合理的模拟运载火箭的结构刚度,便于运载火箭疲劳载荷赋值多轮反复迭代分析。对运载火箭上一些特殊部位,如连接部位,当设计需要重点考察该特殊部位的结构强度时,可以根据需要建立合适的有限元模型,提供该部位较为精确的载荷分布,从而为该特殊部位的结构设计提供依据。通过商业三维建模软件建立三维模型,经简化后的模型,某运载火箭子级由级间段、氧箱、箱间段、燃箱、后过渡段、发动机安装支架、尾段、发动机及机架组
成,总装图如1所示。
[0057]
将三维模型处理成中间转换格式,导入cae中,获得如图2所示的初始模型。
[0058]
运载火箭主要为薄壁结构,因此,采用壳单元划分网格,网格尽量划分为规则四边形,根据运载火箭子级结构特点分布划分级间段、氧箱、燃箱等结构,经组装后。有限元网格如图3所示。
[0059]
对各部段进行参数设置,主要参数包括等效密度、等效厚度、弹性模量、泊松比和剪切模量。
[0060]
(2)气动疲劳载荷转换模块
[0061]
1)气动疲劳载荷计算
[0062]
根据特征弹道数据,具体包括飞行时间、高度、速度、马赫数、动压、分离时刻,选取过载最大的工况进行气动疲劳载荷计算,通过气动软件计算气动疲劳载荷,如图4所示,获得运载火箭气动疲劳载荷,具体包括三方向气动力和力矩系数。
[0063]
2)气动疲劳载荷转换成结构疲劳载荷
[0064]
通过开发载荷转换程序,把气动疲劳载荷等效转换成结构疲劳载荷。
[0065]
输入文件
[0066]
输入文件1:此文件用于输入气动疲劳载荷的计算结果。数据共有6列,前三列为气动节点的笛卡尔坐标,后三列为气动节点在笛卡尔坐标三方向的分力。按运载火箭子级区域划分为外壳、尾段挡板、发动机等几个部分,这几个部分的气动疲劳载荷数据分别制成输入文件1,作为气动疲劳载荷输入。
[0067]
输入文件2:此文件用于输入有限元模型中单元、结点信息。前一部分为单元信息,后一部分为节点信息。按一子级区域划分为外壳、尾段挡板、发动机等几个部分,这几个部分的有限元模型几何数据分别制成输入文件2,作为单元、节点信息输入。
[0068]
有限元软件输出的结点信息为大域格式,在此程序读入有限元模型信息时,需要将结点信息的大域格式转换为小域格式,否则程序报错。
[0069]
输入参数
[0070]
程序运行所需的各种控制参数,分为强制型和非强制型两种。强制型必须由用户输入,对结果影响较大的参数,非强制型可以采用默认值。输入参数主要包括单元类型、单元阶次、输入文件格式、气动输入疲劳载荷形式和单位、结构输出疲劳载荷形式和单位、网格形式、取矩点坐标、气动坐标原点、结构坐标原点、坐标轴对应关系。
[0071]
寻找距离气动节点最近的有限元结构节点
[0072]
输入气动节点上的疲劳载荷,找到距离气动结点最近的有限元单元结构节点,,对所有的气动点进行循环,在每个气动点下循环有限元结构单元,比较气动点与各有限元结构单元中心的距离,找到距离最近的有限元单元(有限元单元中心坐标为单元上各结点坐标的平均值),即为气动结点所属有限元单元。再将气动结点上的力平移至所属的有限元单元的各结点上。采用循环寻找距离气动点最近的有限元单元方法,可以加速设计迭代流程,提高了计算效率。
[0073]
气动网格与结构有限元网格节点载荷数据的转换算法
[0074]
找到气动疲劳载荷距离气动点最近的有限元单元后,通过最小变形能算法进行气
动疲劳载荷转换。结构受力变形,从而在结构内储存了变形能,称为应变势能或者变形能。如果受力过程是静态或者准静态的,结构不产生动能,又假设结构内摩擦可以忽略,因而可以忽略由于受力引起的结构温度变化,根据能量守恒定律,外力在结构变形过程中所做的功将全部转化为变形能。
[0075]
假设有限元节点和气动节点之间有一根无形的梁。该梁是气动节点一端固支的悬臂梁,悬臂梁长度为lj,则该悬臂梁自由端上的有限元节点分配到载荷 pj时其变形能为:
[0076][0077]
式中:ej为假想梁的抗弯刚度。
[0078]
运载火箭三维模型中有限元节点数量为n,变形能为:
[0079][0080]
由最小变形能原理可知,分配到有限元节点上的载荷,应使整个系统的变形能最小,同时还应该满足静力等效(合力相等,合力矩相等)条件,即应满足如下四个等式:
[0081][0082][0083]
式中:n为有限元模型节点数,n=1,2,3
……
[0084]
以式(3)的四个方程为约束条件,采用拉格朗日乘子法建立极值函数如下:
[0085][0086]
式中:λ,λ
x
,λy,λz为乘子。
[0087]
由最小变形能原理可知,真实的载荷加载情况应使整个系统的变形能最小。为了使整个系统的变形能最小,也就是使f(λ,λ
x
,λy,λz)取得最小值,该函数对pj偏导数等于零。
[0088]
令:
[0089][0090]
得:
[0091][0092]
这样
[0093][0094]
将式(3)代入式(4)得:
[0095][0096]
采用列主元高斯消去法求解式(8),得到λ,λ
x
,λy,λz后代入式(7)即可得到影响域内各有限元节点所分配到的节点载荷。对所有有限元节点执行上述计算过程,计算每个气动节点影响域内各有限元节点分配到的载荷,最后将同一节点上被分配到的载荷累加,即可得到该节点的载荷。
[0097]
变形能通过最小变形能算法,由气动节点疲劳载荷向有限元节点载荷同时进行力和力矩的转化。开发相关的数值转换软件,依据静力等效原则和传力路线不变原则,使得总载荷、总压心和传力路线不变,确保了载荷的真实传递,如图5所示。气动疲劳载荷转换前后偏差要求:合力《0.5%,合力矩《0.5%,疲劳载荷赋值精度更高,为运载火箭结构减重设计提供了有利依据。
[0098]
3)疲劳载荷后处理模块
[0099]
按照传统的载荷输出格式,用于大部段结构设计的载荷通常是以截面集中力的形式提供,而采用三维有限元模型计算后的载荷输出为有限元单元力,需要合成后供结构设计用。在建立完整的三维有限元模型进行分析后,拟实现对载荷计算结果的后处理。编制相应的结果后处理程序,实现对要求部件的内部载荷进行自动提取,对要求站位的轴力、剪力、弯矩进行合成,并对所要求工况进行包络分析;将载荷计算结果以图形、图表、云图的形式实现可视化显示和文本输出。
[0100]
采用后处理及可视化技术。实现对载荷计算结果数据进行快速批量处理,并以图形、图表、云图形式实现可视化显示和文本输出。主要内容包括站位轴、弯、剪、扭载荷的合成、内部载荷的提取以及与结构强度接口。
[0101]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
[0102]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。