1.本发明基于非线性最小二乘的曲面体定位基准平面调整方法,属于曲面体定位基准平面调整领域。
背景技术:
2.目前在使用机床对曲面体进行精加工时,对曲面体的基准平面定位难度较大,曲面体会以任意的姿态放置在机床工作台或者调姿驱动器上,其基准面与工作台的坐标系之间存在一定的位置偏差,需要进行原点偏移和坐标轴偏转等位移补偿操作。
3.目前针对曲面体定位基准调整,通常采用布尔沙模型对其进行坐标转换,在计算求解参数的过程中,转换模型省略二次及二次以上分量,或在旋转矩阵中的三角函数被近似处理成角度,这样都会产生较大的截断误差,将损害坐标转换精度,并且在计算过程繁琐且基准点选择对参数影响较大,且由于计算参数省略展开式的高阶项,精度较低,采用此调整方法仅适用于微小旋转角的情况,或基于七参数的非线性最小二乘法的坐标系转换算法,计算过程繁琐且参数偏差加大。
技术实现要素:
4.本发明为了克服现有技术中存在的不足,所要解决的技术问题为:提供一种基于非线性最小二乘的曲面体定位基准平面调整方法的改进。
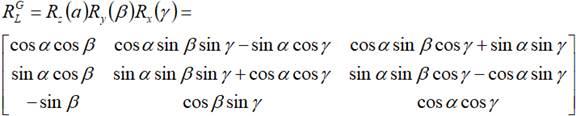
5.为了解决上述技术问题,本发明采用的技术方案为:基于非线性最小二乘的曲面体定位基准平面调整方法,包括如下调整步骤:步骤一:设曲面体理论坐标系为:,其三个配准点a,b,c的理论坐标分别是:;将曲面体固定在工作台后,通过激光跟踪仪测量获取曲面体上配准控制点的坐标;设曲面体实际坐标系为:,其三个配准点d,e,f的实际坐标分别是:;设曲面体的实际坐标系相对理论坐标系于偏移包括3个平移参数,,,各参数代表分别沿x、y、z轴的平移量,3个旋转参数α,β,γ分别代表绕x、y、z轴的旋转角度,实际坐标系相对理论坐标系的尺度缩放比例为k;步骤二:在布尔沙模型中,通过将两坐标系原点平移至各自基准控制点的中心位置,建立中心辅助转换坐标系:构建基于布尔沙-沃尔夫模型的坐标转换模型为:
;其中:;;简化得:;其中:分别为理论坐标系上基准点的坐标值;分别为实际坐标系上基准点的坐标值;分别为曲面体实际坐标系绕自身z轴旋转α角,绕y轴旋转β角,绕z轴旋转γ角的旋转矩阵;为理论坐标系g转换到实际坐标系l上的旋转变换矩阵;计算配准点中心点位置为:;其中:x为坐标系中配准点的坐标,n为配准点个数,为配准点集的中心坐标;实际坐标上的三个配准点的中心点的坐标值为:;其中:为中心点的x轴坐标值,为中心点的y轴坐标值,为中心点的z轴坐标值;理论坐标上的三个配准点的中心点的坐标为:
;其中:为中心点的x轴坐标值,为中心点的y轴坐标值,为中心点的z轴坐标值;则构建基于布尔沙-沃尔夫模型的中心辅助坐标转换模型为:;简写为:;其中:;;式中:是控制点集的理论坐标,是控制点集的实际坐标;步骤三:基于非线性最小二乘法和高斯-牛顿迭代法求解中心辅助坐标转换模型,得到七参数,并根据七参数来调整曲面体位置到达最佳的工作位置:首先令;其中三维坐标转换模型,根据最小二乘原理,求解极小值为:;简化有:为;即:;再求解:;
式中:;在解算过程中,采用高斯-牛顿迭代法求解,具体步骤为;步骤3.1:将线性化,在基准点对进行泰勒展开,得:;步骤3.2:将上式带入式中,得到下一次迭代式为:;在迭代过程中,两相邻七参数向量差的一范数符合精度要求或小于某阀值时停止迭代,即可得最小二乘法则下的最优解;步骤3.3:解算出的x,y,z为曲面体实际坐标系原点与理论坐标原点的偏移量;解算出的α,β,γ为曲面体实际坐标系三坐标轴与理论坐标系三坐标轴的偏转角度;解算出的k为两坐标系的尺度缩放比例;步骤3.4:基于偏移量与缩放比例进行调整,向基准面补偿相应的位移和偏转角度值,将曲面体移动至最佳的工作位置。
6.本发明相对于现有技术具备的有益效果为:本发明具体提供一种基于非线性最小二乘的中心辅助空间坐标转换算法的曲面体定位基准平面调整方法,先通过求解出理论模型上基准点和激光跟踪仪测量的基准点的中心坐标,再用多元函数的极小值来解算七参数最优值,在提高精度的情况下可实现收敛速度快,计算结果正确且稳定,为解决曲面体基准调整提供新的解决方法;通过实验计算,此方法可减少迭代次数且收敛,能得到同样精确的七参数解说明本文算法解决大旋转角问题是有效的,并且具有收敛快速的特点,本发明对平移参数并不敏感,均能较快收敛,并能得到正确的七参数解。
具体实施方式
7.本发明在实施时,预先在曲面体的cad模型上预先规划出配准基准点,采用激光跟踪仪等高精度测量设备检测曲面体的配准基准点在工作台上的位置,在得知基准面工作台上的位置后,通过改进七参数布尔沙坐标转换公式,构建更精确的基准平面定位的拟合位姿的数学模型,求解曲面体理论坐标与曲面体实际坐标的位置关系,即求得定位基准平面需要调整的位移和旋转的角度,基于此方法可有效降低计算量,提高曲面体的基准面定位
的效率;本发明提供的曲面体定位基准平面调整方法具有普遍性适用性,可以在不同的复杂曲面体基准面的调整过程中使用。
8.上述为曲面体配准控制点,指曲面体在cad或三维模型上预先规划出的模型配准控制点集,选取曲面体的特征点作为模型配准控制点,选取的目标为:尽量能识别特征明显、测量方便、配准稳定,在满足配准可靠性要求的情况下,尽可能使配准定位的精度与效率更高;如曲面相交处,曲面下的支撑点处,曲面特殊结构处的特征点等等;选择合适的基准控制点,并取三个不在同一直线上的三个点作为基准点,以此作为一个基准平面,即曲面体姿态的变化会体现在基准平面的位移和偏转上。
9.为求得实际曲面体的基准面的位置,需要得知曲面体实际坐标系与理论坐标系的相对位置,则需要求出曲面体实际的三个配准点与理论模型的三个配准点的坐标转换关系,因此,需要先求出曲面体实际在工作台上的坐标系与理论模型的坐标系的转换关系,即知道曲面体基准面在工作台上的相对位置,转换参数即是需要调整的位移和旋转的角度,通过调整基准面位置来达到曲面体工作的最佳位置;本发明设曲面体的理论坐标系与工作坐标系重合(坐标原点重合,坐标轴重合),即理论坐标系上的基准面是曲面体在工作台上的定位基准平面需要调整到的实际位置;在实际应用中曲面体的理论坐标系与工作坐标系的位置关系又需要具体问题具体分析。
10.本发明提供一种基于非线性最小二乘的中心辅助空间坐标转换算法,用于调整曲面体基准,求解理论模型上基准点和激光跟踪仪测量的基准点的中心坐标,采用多元函数极小值解算七参数最优值,为曲面体基准调整提供新的解决方法,该方法具体为:首先设曲面体理论坐标系为:,其三个配准点a,b,c理论坐标分别是:;曲面体固定在工作台后,通过激光跟踪仪测量获取曲面体上配准控制点的坐标,设曲面体实际坐标系为:,其三个配准点d,e,f的实际坐标分别是:;曲面体的实际坐标系相对理论坐标系于偏移包括3个平移参数,,代表分别沿x、y、z轴的平移量,3个旋转参数α,β,γ分别代表绕x、y、z轴的旋转角度;实际坐标系相对理论坐标系的尺度缩放比例为k。曲面体位置的理论坐标系g和实际位置坐标系l的原点并不重合,且各个坐标轴方向并不相同。
11.然后构建基于布尔沙-沃尔夫模型的坐标转换模型:;其中:
;;简化得:;在布尔沙模型中,通过将两坐标系原点平移至基准控制点的中心位置,建立中心辅助转换坐标系,使基准控制点均匀的分布其中。
12.首先计算中心点的位置:;实际三个配准点的中心点的坐标坐标是:;同理,理论坐标上的三个配准点中心点坐标:;则构建基于布尔沙-沃尔夫模型的中心辅助坐标转换模型为:;简写成:;其中:
;;是控制点集的理论坐标,是控制点集的实际坐标;此时中心辅助转换坐标系的x,y,z轴与理论坐标系的x,y,z轴平行;再利用非线性最小二乘法和高斯-牛顿迭代法求解中心辅助坐标转换模型,得到七参数:首先令;其中三维坐标转换模型,根据最小二乘原理,求解极小值:;简化为:为;再求解:;式中:;在解算过程中,采用高斯-牛顿迭代法求解:先将线性化,在点对进行泰勒展开,得:;
将上式带入式可中,得下一次迭代式:;在迭代过程中,两相邻七参数向量差的一范数小于某阀值时停止迭代,即可得最小二乘法则下的最优解。
13.解算出的x,y,z为曲面体实际坐标系原点与理论坐标原点的偏移量;α,β,γ为曲面体实际坐标系三坐标轴与理论坐标系三坐标轴的偏转角度;k为两坐标系的尺度缩放比例;最后通过调整基准面相应的位移和偏转角度位置来达到曲面体工作的最佳位置。
14.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
