技术特征:
1.一种多工位刀具专用磨床控制方法,其特征在于,所述方法包括:根据目标刀具的形状将刀具加工过程分成多个依序的工位,预设工位的数量为n;基于每个工位的加工工艺选定适配种类的加工机构;获取每种加工机构完成对应工位的单件加工时间,,表示第种加工机构完成对应工位的单件加工时间;按照的比例关系配置每种加工机构的数量,并将配置好数量的每种加工机构固定在磨床的底座上;启动磨床加工过程,上一个工位的某个加工机构完成对刀具a的加工后,则放入上一个工位的完成收纳槽中,以待下一个工位的某个加工机构空闲时,自动从上一个工位的完成收纳槽中取出刀具a,并对刀具a进行下一个工位的加工处理。2.根据权利要求1所述的一种多工位刀具专用磨床控制方法,其特征在于,在将配置好数量的每种加工机构固定在磨床的底座之后,所述方法还包括:预设相同种类的加工机构集中设置在底座的对应的工位区域;分别获取多个工位区域,并通过几何算法计算出多个工位区域的中心点;对多个工位区域的中心点进行聚类计算,得到异常查验中心;基于各个工位区域发生异常的概率进行校正,并得到修正后的异常查验中心;将异常查验传感器设置在异常查验中心或将异常查验传感器的查验中心聚焦所述异常查验中心;由异常查验传感器实时查验所述磨床多个工位的工作状态,当异常查验传感器查验出所述磨床的某个工位出现异常时,则发出报警信息。3.根据权利要求2所述的一种多工位刀具专用磨床控制方法,其特征在于,基于各个工位区域发生异常的概率进行校正,并得到修正后的异常查验中心,具体包括:获取每个工位区域内的所有加工机构,并根据历史使用状况获取每个加工机构的异常发生概率,基于所有加工机构的异常发生概率进行累加计算出每个工位区域的异常发生概率;以所述异常查验中心为坐标原点建立基于底座上表面的二维坐标系,采用二维坐标系的横轴将底座上表面的工位区域划分为第一部分和第二部分;基于第一部分内的多个工位区域的中心点进行聚类得到第一部分中心点,并基于第二部分内的多个工位区域的中心点进行聚类得到第二部分中心点;针对第一部分内的所有工位区域的异常发生概率进行累加,得到第一异常发生概率和,并针对第二部分内的所有工位区域的异常发生概率进行累加,得到第二异常发生概率和;将第二异常发生概率和除以第一异常发生概率和,得到第一比例;将第一部分中心点与第二部分中心点之间的直线段按照第一比例进行分段,标记出第一分段点,并获取第一分段点的纵坐标;采用二维坐标系的纵轴将底座上表面的工位区域划分为第三部分和第四部分;基于第三部分内的多个工位区域的中心点进行聚类得到第三部分中心点,并基于第四部分的多个工位区域的中心点进行聚类得到第四部分中心点;
针对第三部分的所有工位区域的异常发生概率进行累加,得到第三异常发生概率和,并针对第四部分的所有工位区域的异常发生概率进行累加,得到第四异常发生概率和;将第四异常发生概率和除以第三异常发生概率和,得到第二比例;将第三部分中心点与第四部分中心点之间的直线段按照第二比例进行分段,得到第二分段点,并确定第二分段点的横坐标;基于第一分段点的纵坐标和第二分段点的横坐标得到修正后的异常查验中心,且修正后的异常查验中心的横坐标等于第二分段点的横坐标,修正后的异常查验中心的纵坐标等于第一分段点的纵坐标。4.根据权利要求2所述的一种多工位刀具专用磨床控制方法,其特征在于,在由异常查验传感器实时查验所述磨床多个工位的工作状态之后,所述方法还包括:记录所述异常查验传感器实时查验的多个历史异常数据,所述历史异常数据至少包括发生异常的坐标位置以及发生异常时的环境数据;构建异常预测模型,基于多个历史异常数据对所述异常预测模型进行训练,以得到优化后的异常预测模型;采集获取当前的环境数据,基于当前的环境数据并通过所述异常预测模型预测出异常位置;将异常查验中心更新为预测出的异常位置。5.根据权利要求1所述的一种多工位刀具专用磨床控制方法,其特征在于,在上一个工位的某个加工机构完成对刀具a的加工之后,所述方法还包括:通过预置在上一个工位的图像传感器对刀具a进行图像采集,得到原始图像;采用图像识别技术对所述原始图像进行图像识别,并分割出上一个工位的加工图像d;预设上一个工位每完成一个刀具加工,均需要由图像传感器进行图像采集,并将每个刀具对应的历史加工图像依时间先后顺序记录在历史图像库中,从所述历史图像库中就近选取r个历史加工图像;将加工图像d中的每个像素点的灰度值分别与r个历史加工图像的对应像素点的灰度值进行逐一作差计算,并判断差值绝对值是否大于第二预设阈值,如果大于,则记录该加工图像d中的对应像素点为疑似差异点一次;待所述加工图像d中所有像素点的灰度值分别完成与r个历史加工图像的对应像素点的灰度值进行逐一作差后,则统计所述加工图像d中每个像素点被记录疑似差异点的次数;判断所述加工图像d中每个像素点被记录疑似差异点的次数是否大于第三预设阈值,如果是,则判定对应像素点为异常点;基于所述加工图像d的异常点,并通过预设的合格与否判定方法判定所述加工图像d对应的刀具a在上一个工位的加工过程是否合格,如果不合格,则传送至不良品处理站。6.根据权利要求5所述的一种多工位刀具专用磨床控制方法,其特征在于,通过预设的合格与否判定方法判定所述加工图像d对应的刀具a在上一个工位的加工过程是否合格,具体包括:预设加工图像d内不同的划分区域对合格与否的影响权重不同,获取加工图像d中的不同划分区域的影响权重;获取加工图像d中所有的异常点,并确定出每个异常点落入的划分区域;
统计每个划分区域内所有异常点的累计数量,并将每个划分区域内所有异常点的累计数量乘以对应的影响权重,得到每个划分区域的不合格区域评分;将所有划分区域的不合格区域评分进行相加,得到加工图像d的不合格总评分;判断加工图像d的不合格总评分是否大于第四预设阈值,如果是,则判定刀具a为不合格。7.一种多工位刀具专用磨床控制系统,其特征在于,包括存储器和处理器,所述存储器中包括一种多工位刀具专用磨床控制方法程序,所述多工位刀具专用磨床控制方法程序被所述处理器执行时实现如下步骤:根据目标刀具的形状将刀具加工过程分成多个依序的工位,预设工位的数量为n;基于每个工位的加工工艺选定适配种类的加工机构;获取每种加工机构完成对应工位的单件加工时间,,表示第种加工机构完成对应工位的单件加工时间;按照的比例关系配置每种加工机构的数量,并将配置好数量的每种加工机构固定在磨床的底座上;启动磨床加工过程,上一个工位的某个加工机构完成对刀具a的加工后,则放入上一个工位的完成收纳槽中,以待下一个工位的某个加工机构空闲时,自动从上一个工位的完成收纳槽中取出刀具a,并对刀具a进行下一个工位的加工处理。8.根据权利要求7所述的一种多工位刀具专用磨床控制系统,其特征在于,在将配置好数量的每种加工机构固定在磨床的底座之后,所述多工位刀具专用磨床控制方法程序被所述处理器执行时还实现如下步骤:预设相同种类的加工机构集中设置在底座的对应的工位区域;分别获取多个工位区域,并通过几何算法计算出多个工位区域的中心点;对多个工位区域的中心点进行聚类计算,得到异常查验中心;基于各个工位区域发生异常的概率进行校正,并得到修正后的异常查验中心;将异常查验传感器设置在异常查验中心或将异常查验传感器的查验中心聚焦所述异常查验中心;由异常查验传感器实时查验所述磨床多个工位的工作状态,当异常查验传感器查验出所述磨床的某个工位出现异常时,则发出报警信息。9.根据权利要求8所述的一种多工位刀具专用磨床控制系统,其特征在于,基于各个工位区域发生异常的概率进行校正,并得到修正后的异常查验中心,具体包括:获取每个工位区域内的所有加工机构,并根据历史使用状况获取每个加工机构的异常发生概率,基于所有加工机构的异常发生概率进行累加计算出每个工位区域的异常发生概率;以所述异常查验中心为坐标原点建立基于底座上表面的二维坐标系,采用二维坐标系的横轴将底座上表面的工位区域划分为第一部分和第二部分;基于第一部分内的多个工位区域的中心点进行聚类得到第一部分中心点,并基于第二部分内的多个工位区域的中心点进行聚类得到第二部分中心点;针对第一部分内的所有工位区域的异常发生概率进行累加,得到第一异常发生概率和,并针对第二部分内的所有工位区域的异常发生概率进行累加,得到第二异常发生概率
和;将第二异常发生概率和除以第一异常发生概率和,得到第一比例;将第一部分中心点与第二部分中心点之间的直线段按照第一比例进行分段,标记出第一分段点,并获取第一分段点的纵坐标;采用二维坐标系的纵轴将底座上表面的工位区域划分为第三部分和第四部分;基于第三部分内的多个工位区域的中心点进行聚类得到第三部分中心点,并基于第四部分的多个工位区域的中心点进行聚类得到第四部分中心点;针对第三部分的所有工位区域的异常发生概率进行累加,得到第三异常发生概率和,并针对第四部分的所有工位区域的异常发生概率进行累加,得到第四异常发生概率和;将第四异常发生概率和除以第三异常发生概率和,得到第二比例;将第三部分中心点与第四部分中心点之间的直线段按照第二比例进行分段,得到第二分段点,并确定第二分段点的横坐标;基于第一分段点的纵坐标和第二分段点的横坐标得到修正后的异常查验中心,且修正后的异常查验中心的横坐标等于第二分段点的横坐标,修正后的异常查验中心的纵坐标等于第一分段点的纵坐标。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中包括一种多工位刀具专用磨床控制方法程序,所述多工位刀具专用磨床控制方法程序被处理器执行时,实现如权利要求1至6中任一项所述的一种多工位刀具专用磨床控制方法的步骤。
技术总结
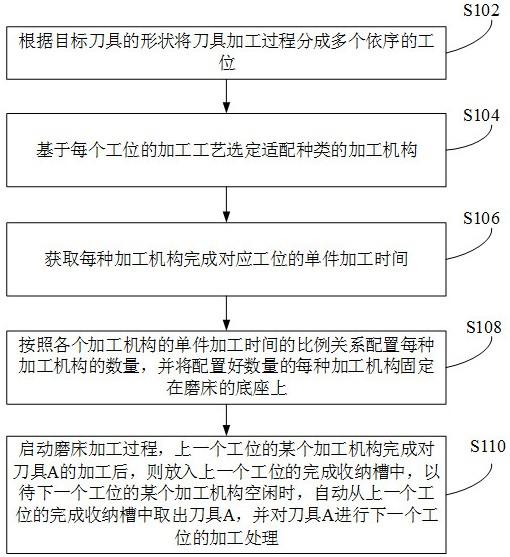
本发明提供一种多工位刀具专用磨床控制方法、系统和存储介质,所述方法包括:根据目标刀具的形状将刀具加工过程分成多个依序的工位;基于每个工位的加工工艺选定适配种类的加工机构;获取每种加工机构完成对应工位的单件加工时间;按照各个加工机构的单件加工时间的比例关系配置每种加工机构的数量,并将配置好数量的每种加工机构固定在磨床的底座上;启动磨床加工,上一个工位的某个加工机构完成对刀具A的加工后,则放入上一个工位的完成收纳槽中,以待下一个工位的某个加工机构空闲时,自动从上一个工位的完成收纳槽中取出刀具A,并进行下一个工位加工。本发明能够提升刀具的生产效率,并确保成品刀具的合格率。并确保成品刀具的合格率。并确保成品刀具的合格率。
技术研发人员:周波
受保护的技术使用者:东莞飞元科技有限公司
技术研发日:2022.02.17
技术公布日:2022/3/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。