1.本实用新型涉及通道闸机技术领域,尤其涉及一种用于激光雷达识别的收费站闸机。
背景技术:
2.目前的高速公路收费口或者停车场收费口根据闸机杆旁边的摄像头对车辆的车牌后进行识别,识别到车牌后闸机干升起。驾驶员确定闸机杆已升起后驱车通过收费口。但是闸机在使用过程中时而会发生识别失败的情况,会发生向驾驶员发出识别提示音,但是闸机干未升起的情况,此时需要工作人员人工升起闸机杆,驾驶员确认闸机干升起后通过收费口。
3.随着etc收费站的普及以及智慧交通的发展,对自动驾驶车辆安全通过etc收费站的能力越发迫切和重要。自动驾驶车辆经过高速或停车场收费口的时候,通常会通过v2x、视觉感知或者激光雷达等感知系统车载检测系统检测闸机杆是否升起,判断自动驾驶车辆是否可以安全通过收费站。其中,v2x受限于定位的精确度。视觉感知受限于场景,通过视觉感知判断闸机杆的升降状态在天黑的时候视觉的检测效果准确率会大大降低。在很多自动驾驶车辆上配置有激光雷达,在自动驾驶车辆行驶至收费站闸机前等待通过时,如果利用激光雷达检测闸机杆是否升起,则受性能和闸机结构限制难以确保每一次都能检测到闸机杆,因此存在闸机杆已经升起但激光雷达没有检测到从而导致车道阻塞的风险。
4.由此可见,目前尚需一种易于激光雷达识别检测,确保自动驾驶车辆能顺利安全通过的闸机。
技术实现要素:
5.实用新型要解决的问题:
6.针对上述问题,本实用新型的目的在于提供一种易于激光雷达识别检测,能改善自动驾驶车辆通过闸机的成功率和安全性的用于激光雷达识别的收费站闸机。
7.解决问题的技术手段:
8.为解决上述问题,本实用新型提供一种用于激光雷达识别的收费站闸机,包括:
9.内部设置有电气控制装置和驱动装置的闸机机箱;以及
10.一端设置于所述闸机机箱,在所述驱动装置的驱动下摆动升降的闸机杆;
11.在所述闸机机箱的上方设置有车牌识别单元;
12.所述闸机杆沿长度方向设置有能被车辆的激光雷达跟踪识别的至少一个激光雷达识别部;
13.所述收费站闸机在所述车牌识别单元识别出所述车辆的车牌后升起所述闸机杆,所述车辆通过激光雷达跟踪检测所述激光雷达识别部而判定所述闸机杆升起到规定位置后通过所述收费站闸机。
14.根据本实用新型,通过在闸机杆上设置激光雷达识别部,能有效增大闸机杆的监
测面积,从而改善激光雷达的识别准确率。
15.也可以是,本实用新型中,所述激光雷达识别部通过安装座设置于所述闸机杆。
16.也可以是,本实用新型中,所述激光雷达识别部设置于所述闸机杆的中央。
17.也可以是,本实用新型中,所述激光雷达识别部是圆盘状的指示牌,所述指示牌的直径与所述闸机杆的宽度的比值范围为2-3。
18.也可以是,本实用新型中,所述车辆的所述激光雷达通过cnn算法识别所述激光雷达识别部。
19.也可以是,本实用新型中,所述车牌识别单元包括摄像装置和照明装置。
20.也可以是,本实用新型中,所述闸机机箱的外侧设置有在所述车牌识别单元识别出车辆的车牌后进行显示的显示器。
21.实用新型效果:
22.本实用新型能够能改善自动驾驶车辆通过闸机的成功率和安全性。
附图说明
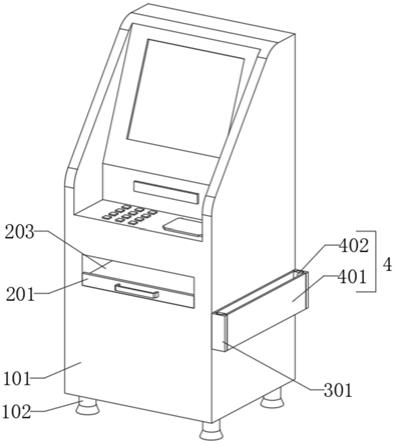
23.图1是根据本技术一实施形态的用于激光雷达识别的收费站闸机的示意图;
24.图2是顶部安装有激光雷达的车辆的示意图;
25.图3是图1所示用于激光雷达识别的收费站闸机允许车辆通过时的状态示意图;
26.图4是装载有激光雷达的车辆通过用于激光雷达识别的收费站闸机的流程图;
27.符号说明:
28.1、闸机机箱;2、闸机杆;3、激光雷达识别部;4、车辆(自动驾驶车辆);41、激光雷达。
具体实施方式
29.以下结合附图和下述实施方式进一步说明本实用新型,应理解,附图和下述实施方式仅用于说明本实用新型,而非限制本实用新型。
30.针对现有闸机难以被自动驾驶车辆的激光雷达识别的问题,本实用新型提一种易于激光雷达识别检测检测,能改善自动驾驶车辆通过闸机的成功率和安全性的用于激光雷达识别的收费站闸机。
31.图1是根据本技术一实施形态的用于激光雷达识别的收费站闸机(以下有时也简称“收费站闸机”)的结构示意图。如图1所示,本实用新型的收费站闸机包括闸机机箱1、闸机杆2和未图示的控制系统。
32.闸机机箱1是收费站闸机的主体结构,形成为大致长方体形状。闸机机箱1的内部设置有作为驱动装置的驱动电机、控制单元和配电箱等。
33.在闸机机箱1的顶部可以设置有旋转支撑机构,旋转支撑机构用于旋转支撑用于对来车的车牌进行识别的车牌识别单元。车牌识别单元可以包括在光线不足时对车牌进行补光的照明装置和对车牌进行拍摄的摄像装置。摄像装置例如可以是摄像机。此外,闸机机箱1的外侧还可以设置有显示器。
34.又如图1所示,在闸机机箱1的一侧插设有横跨道路的闸机杆2。该闸机杆2为一细长直杆,可以通过摆杆连接驱动电机的输出轴,在驱动电机的带动下以设置于闸机机箱1的
一端为中心进行规定角度(例如90
°
)的摆动升降。
35.为了便于自动驾驶车辆的激光雷达识别,本实用新型在闸机杆2上设置用于供车载激光雷达识别的激光雷达识别部3来增加检测面积。本实施形态中,激光雷达识别部3形成为大致圆形板状,换言之激光雷达识别部3是圆盘状的指示牌。为了便于激光雷达更好地进行识别,激光雷达识别部3的直径与闸机杆2的宽度的比值例如可以是2-3,换言之激光雷达识别部3的直径理想是闸机杆2的宽度的2到3倍。
36.更具体地,在闸机杆2的中央部可以设置有安装座,该安装座可以通过按压式或者套孔等方式固定在闸机杆2上。激光雷达识别部3以夹持或是通过螺栓等紧固件固定于该安装座上,由此通过安装座设置在闸机杆2上。另外,安装座的具体结构不限,激光雷达识别部3也可以通过可调节的方式安装在安装座上,安装座自身也可以通过可调节的方式设置在闸机杆2上,由此可以匹配不同形状的闸机杆。
37.图2是顶部安装有激光雷达的车辆4的示意图。如图1、图2所示,在车辆4(自动驾驶车辆)的车顶安装有激光雷达41,该激光雷达41在车辆自动驾驶时工作以检测车辆的周边环境。本实用新型中,激光雷达41除了检测车辆周边环境以外,还可以通过识别和检测设置在闸机杆2上的激光雷达识别部3来判断闸机杆2是否抬杆。
38.图3是收费站闸机允许车辆通过时的状态示意图。如图3所示,作为一个示例,当收费站闸机识别来车后,闸机杆2在驱动电机的驱动下摆动时,激光雷达识别部跟随闸机杆2一起升降。换言之,激光雷达识别部3在闸机杆2升起和降下时分别位于不同的位置,因此车辆4可以借助激光雷达41来识别激光雷达识别部3的所处位置来判断闸机杆2是否升起,进而决定是否控制车辆通过收费站。另一方面,车辆4也还可以通过cnn算法进行图像识别和检测设置在闸机杆2上的激光雷达识别部3,当检测到激光雷达识别部3后,激光雷达41利用距离跟踪识别算法跟踪闸机杆2的抬杆过程,确保车辆4在闸机杆2完全升起的状态下通行。
39.本实施形态中,还可以在激光雷达识别部3上设置反光膜,该反光膜用于反射所述激光雷达扫描器发出的光线。通过在激光雷达识别部3上设置反光膜,能使激光雷达更容易接收到反射的激光束,从而能改善激光雷达对闸机升降的识别度。但是,本实用新型不限于此,也可以是在激光雷达识别部3上不设置反光膜。
40.[其他实施形态]
[0041]
本实用新型中,激光雷达识别部3不限于固定设置在闸机杆2上,也可以是在闸机杆2上设置能在电机驱动下90
°
转动的摆动机构,激光雷达识别部3固定在该摆动机构的摆动件上跟随摆动件一起摆动。当闸机杆2降下至水平位置时,摆动机构在电机驱动下使激光雷达识别部摆动至水平位置,此时激光雷达识别部以无法被激光雷达发出的激光束照射到的形式平行于地面。而收费站闸机检测到来车,使闸机杆2抬杆,摆动机构在电机驱动下带动激光雷达识别部3摆动至竖直位置,即激光雷达识别部3以能够被激光雷达41发出的激光束照射到的形式垂直于地面。换言之,只有当闸机杆2升起时激光雷达识别部3才能被车辆4的激光雷达41识别到,这样能确保激光雷达的识别准确率,提高自动驾驶车辆过闸机的成功率和安全性。
[0042]
以上说明了在收费站闸机的闸机杆2的中央部设置一个激光雷达识别部3的例子,但本实用新型不限于此。激光雷达识别部4不限于形成为圆形的指示牌,也可以形成为其他容易被激光雷达识别的形状和尺寸,也可以设置在闸机杆2上除中央部以外其他容易被检
测到的位置。此外,还可以是在闸机杆2上沿长度方向并排设置多个激光雷达识别部3,多个激光雷达识别部3可以以规定的间隔排列成特定的形状,由此加强激光雷达的识别准确率。
[0043]
图4是装载有激光雷达41的车辆4通过用于激光雷达识别的收费站闸机的流程图。
[0044]
如图4所示,当车辆4驶入收费站时,闸机机箱1上的摄像装置对来车车牌进行拍摄并将拍摄到的车牌图像发送至计算机等控制单元,通过特定算法从图像中获取来车车牌号码别并在显示器上进行显示。
[0045]
当判断来车允许通行时,控制单元向闸机机箱1中的驱动电机发出指令,驱动电机接收指令后驱动闸机杆2升起。
[0046]
此时车辆4上的激光雷达41通过cnn算法检测闸机杆2上的激光雷达识别部3,在检测到激光雷达识别部3后,激光雷达41利用距离跟踪算法跟踪闸机杆2的抬起过程,通过判断激光雷达识别部3的具体位置或者是否存在激光雷达识别部3来判断闸机杆2是否正常升起。
[0047]
当确认闸机杆2完全抬起后,将确认信号穿给整车控制器,车辆4接收到确认信号后按照规控算法控制车辆通过收费站。
[0048]
收费站闸机确认到车辆4通过后,驱动闸机杆2降下至水平位置。
[0049]
根据上述结构,通过在闸机杆上设置激光雷达识别部,能有效增大闸机杆的监测面积,激光雷达检测后判断闸机杆已经升起,将信号传给整车控制器,控制器通过规控算法,确保自动驾驶车辆安全有效的通过收费站。
[0050]
以上的具体实施方式对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,应当理解的是,以上仅为本实用新型的一种具体实施方式而已,并不限于本实用新型的保护范围,在不脱离本实用新型的基本特征的宗旨下,本实用新型可体现为多种形式,因此本实用新型中的实施形态是用于说明而非限制,由于本实用新型的范围由权利要求限定而非由说明书限定,而且落在权利要求界定的范围,或其界定的范围的等价范围内的所有变化都应理解为包括在权利要求书中。凡在本实用新型的精神和原则之内的,所做出的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。