1.本发明涉及机械臂调平技术领域,尤其涉及一种适用于回转式机械臂的机械臂水平度动态调节方法。
背景技术:
2.在晶圆检测与芯片的生产过程中常采用回转式机械臂来进行晶圆的取放操作,但现有的回转式机械臂水平度稳定性差,在取放晶圆时,机械臂关节臂末端的工作面(即与晶圆接触的面)会产生较大的倾斜,导致机械臂难以准确取放晶圆,因此,有必要对机械臂的水平度进行调节。
3.目前,回转式机械臂的水平度多采用静态调节的方式,即在机械臂静止状态下,将水平仪放置到机械臂的某一固定的基准位置上,通过调节机械臂的角度使水平仪读数归零即可。但这种方法受到机械臂各零部件加工误差的影响,调平后的机械臂在转动时,其关节臂工作端的水平度仍会在
±
0.1
°‑±
0.6
°
范围内波动。究其原因,是因为关节臂转动时,关节臂的旋转轴心线难以始终与水平面保持垂直,导致关节臂工作端水平度误差较大,因此,有必要对回转式机械臂的调平方法进行改进。
技术实现要素:
4.为克服上述缺点,本发明的目的在于提供一种机械臂水平度动态调节方法,调节精度高,能有效减少水平度误差,提高机械臂水平度稳定性。
5.为了达到以上目的,本发明采用的技术方案是:一种机械臂水平度动态调节方法,适用于回转式机械臂,回转式机械臂包括底座,底座的上端设有多个首尾相连的且能独立转动的关节臂,关节臂远离其转动轴心线的一端为工作端。其特征在于,包括底座调平、关节臂调平;其中,关节臂调平包括:s21、将水平仪安装到需调平的关节臂的工作端上;s22、旋转关节臂以测量关节臂工作端的横向垂直度偏差值,并进行横向垂直度调节;s23、旋转关节臂以测量关节臂工作端的纵向垂直度偏差值,并进行纵向垂直度调节。
6.本发明的有益效果在于:首先通过底座调平能提高底座的水平度,减少因底座水平度偏差导致的对关节臂水平度的影响,使得关节臂的调平更加准确;在关节臂调平时,首先通过旋转关节臂测定出关节臂转动至不同位置时的横向垂直度偏差值,并进行横向垂直度调平操作,然后再通过旋转关节臂测定出关节臂转动至不同位置时的纵向垂直度偏差值,并进行纵向垂直度调平操作;该关节臂调平操作通过测定出关节臂在不同位置上的偏差值,并以此偏差值作为调平基础,能有效提高关节臂的调平精度,减少因关节臂各零部件加工误差导致的关节臂动态水平度变化误差大的问题,提高关节臂转动时的水平度稳定性。
7.进一步来说,步骤s22包括:将关节臂自home位置按第一方向旋转第一设定角度,并记录水平仪的偏差值为l1;继续按第一方向旋转第二设定角度,并记录水平仪的偏差值为l2,l2与l1的差值即为横向垂直度偏差值;对关节臂按(l2-l1)/2的调整量调平后再次复
测,直至水平仪记录的偏差值满足预设的允许误差范围内。
8.进一步来说,步骤s23包括:自步骤s22测量出l2的位置作为起始位置,将关节臂按第一方向旋转至home位置,并记录水平仪的偏差值为l3;继续按第一方向旋转第三设定角度,并记录水平仪的偏差值为l4,l4与l3的差值即为纵向垂直度偏差值;对关节臂按(l4-l3)/2的调整量调平后再次复测,直至水平仪记录的偏差值满足预设的允许误差范围内。
9.进一步来说,预设的允许误差范围为
±
0.1mm/m内。
10.进一步来说,所述第一设定角度为80
°‑
100
°
,所述第二预设角度为160
°‑
200
°
,所述第三预设角度为160
°‑
200
°
。在机械臂调平时,第一预设角度越接近90
°
,第二预设角度越接近180
°
,第三预设角度越接近180
°
,对应的偏差值l1、l2、l4读数越准,越利于后续调平操作。
11.进一步来说,所述第一设定角度为90
°
,所述第二预设角度为180
°
,所述第三预设角度为180
°
。
12.进一步来说,关节臂调平还包括:s24、将关节臂上的所有调平螺钉按预设的力矩锁紧后,旋转关节臂360
°
并实时观察水平仪读数变化,若出现异常,则回到步骤s22重新调节。
13.进一步来说,底座包括自下而上依次连接的基准板、过渡板、座体;底座调平包括:s11、将基准板预定位到设备框架上;s12、对基准板的四角进行调平固定,并安装过渡板;s13、将连接有多个关节臂的座体固定并安装到过渡板上。
14.进一步来说,步骤s11包括:将基准板自然放置到设备框架的安装位上;通过水平仪对基准板四个角的水平度进行测定,将基准板上高度最高的一个角作为基准角,通过紧固螺钉将基准角预锁紧到设备框架上。
15.进一步来说,步骤s12包括:沿基准板宽度方向,对与基准角对应的另一角进行水平度调整,并通过紧固螺钉锁定该角的水平度,此时,基准板宽度方向水平度调节完成;对与基准角呈对角设置的另一角进行水平度调整,并通过紧固螺钉锁定该角的水平度,此时,基准板的三个角水平度调节完成;在基准板的第四个角上旋入紧固螺钉,观察水平仪读数变化,并同时将四个角上的紧固螺钉旋紧,然后将过渡板固定安装到基准板上。
16.进一步来说,步骤s12还包括基准板水平度复测,沿基准板长度方向均匀选取至少三个点,并通过水平仪检测各点的水平度。
17.进一步来说,当关节臂上安装有用以夹取晶圆的晶圆片叉时,将各关节臂均旋转至home位置,并在晶圆片叉上放置无线水平仪;当无线水平仪的读数大于预设值时,调节晶圆片叉上的调平螺钉,直至无线水平仪的读数小于预设值。
附图说明
18.图1为本发明实施例的过渡板、基准板安装的结构示意图;
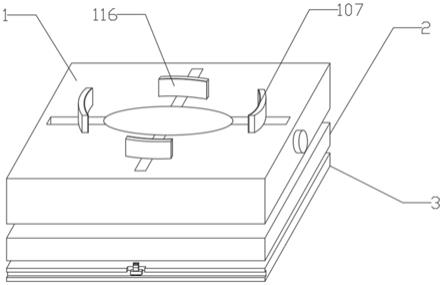
19.图2为本发明实施例的待调平的关节臂位于home位置时的状态示意图;
20.图3为本发明实施例的步骤s22中按第一方向旋转90
°
的状态示意图;
21.图4为本发明实施例的步骤s22中按第一方向继续旋转180
°
的状态示意图;
22.图5为本发明实施例的步骤s23中按第一方向旋转至home位置的状态示意图;
23.图6为本发明实施例的步骤s23中按第一方向继续旋转180
°
的状态示意图;
24.图7为本发明实施例的各关节臂均旋转至home位置的状态示意图;
25.图8为本发明实施例的晶圆片叉调平过程中的状态示意图。
26.图中:
27.1-底座;11-基准板;12-过渡板;13-座体;2-关节臂;3-晶圆片叉;4-水平仪标记;5-无线水平仪。
具体实施方式
28.下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
29.实施例
30.目前,回转式机械臂的水平度多采用静态调节的方式,即在机械臂静止状态下,将水平仪放置到机械臂本体的基准面上,当水平仪的读数出现偏差时,调节关节臂上的调平螺钉,以使关节臂的角度微量变化,直至水平仪读数归零。这种方式是在静态状态下进行调平的,但由于机械臂上的各零部件存在加工误差,当机械臂转动至不同位置时,受各零部件加工误差的影响,机械臂在不同位置处的水平度会有幅度较大的波动,由于关节臂的工作端离本体基准面的距离最远,这个水平度的波动在关节臂工作端表现最为明显。经实际检测,静态调试后的机械臂在转动时,其关节臂工作端的水平度仍在
±
0.1
°‑±
0.6
°
范围内波动。这种较大误差的波动已难以满足一些水平精度要求高的工况,因此,申请人深度剖析了这种较大误差的波动存在的原因,并发现是因为在关节臂转动时,关节臂的转动轴心线无法与机械臂本体的基准面垂直,轴心线在竖直方向上会发生偏移,才导致关节臂工作端水平度误差波动较大。
31.理论上,当直线a与直线b在90
°
相交时,直线a绕直线b旋转的过程中,直线a相较于直线b所在的水平面的角度能保持不变,因此,如果想要提高关节臂工作端的水平度,就需要找出关节臂转动轴心线,并使该转动轴心线与水平参照面保持既定角度以作为参照,再使关节臂工作端与关节臂转动轴心线调整至90
°
相交的关系,以控制关节臂动态水平度变化。
32.基于此,本发明提供了一种机械臂水平度动态调节方法,使得机械臂的水平度能跳过除旋转轴之外的所有累计误差以达到机械臂所能达到的最高水平精度。该方法适用于所有回转式机械臂的水平度调节。
33.需要说明的是,参见附图1-2所示,本实施例的回转式机械臂包括底座1,底座1的上端设有多个首尾相连且能独立转动的关节臂2,并将关节臂2远离其转动轴心线的一端定义为工作端。底座1包括自下而上依次固定连接的基准板11、过渡板12、座体13,多个关节臂2中的最下层关节臂2铰接在座体13的上端。示例性地,本实施例的关节臂2设置有三个。
34.本发明的一种机械臂水平度动态调节方法,包括:s1、底座调平;s2、关节臂调平。
35.具体的,底座调平包括如下步骤:
36.s11、将基准板11预定位到设备框架(图中未示出)安装位上:将基准板11自然放置到设备框架的安装位上,并使基准板11与设备框架安装位保持最小间隙;使用0.5mm/m精度的水平仪对基准板11的四个角进行水平度测定,并找出高度最高的一个角,将该角作为基准角;使用一颗紧固螺钉将基准角轻轻锁紧到设备框架上进行预定位;
37.s12、对基准板11的四角进行调平固定:旋入基准板11上所有平端顶丝并使平端顶丝轻微受力;使用0.5mm/m精度的水平仪先调整基准板11宽度方向的水平度,即沿基准板11宽度方向,对与基准角对应的另一个角进行水平度调整,并在该角上旋入一颗紧固螺钉锁定该角的水平度,此时,基准板11宽度方向水平度调节完成;使用0.5mm/m精度的水平仪对与基准角对角的另一个角进行水平度调整,并通过一颗紧固螺钉锁定该角的水平度,此时,三个角水平度调节完成后基准板11处于理论的水平状态;将0.5mm/m精度的水平仪放置到第四个角上,并在第四个角上旋入紧固螺钉,观察水平仪读数变化,并将紧固螺钉旋紧;以对角的方式将所有的平端顶丝锁紧,并观察水平仪,确保锁紧时水平仪读数无明显变化;沿基准板11长度方向均匀选取至少三个点,并通过水平仪检测各点的水平度,确保各点的水平度均在
±
1.5mm/m以内;然后将过渡板12固定安装到基准板11上。
38.s13、将连接有多个关节臂2的座体13固定到过渡板12上:将座体13放置到过渡板12安装位上,轻轻旋紧四颗平端顶丝至触及过渡板12,此时,座体13底部由四点支撑;然后通过紧固螺钉将座体13的四角固定到过渡板12上,并锁紧上述的紧固螺钉,此时,座体13固定完成。
39.参见附图3-6所示,在本实施例中,关节臂2调平需对各关节臂按自下而上的顺序依次进行调平,单个关节臂调平包括如下步骤:
40.s21、将0.1mm/m精度的水平仪放置到关节臂2的工作端上,并使用记号笔对角标记水平仪位置标记4,确保在调平过程中水平仪位置固定不变:
41.s22、参见附图3、4所示,将关节臂自home位置按第一方向旋转第一设定角度,并记录水平仪的偏差值为l1;继续按第一方向旋转第二设定角度,并记录水平仪的偏差值为l2,l2与l1的差值即为关节臂转动轴心线与关节臂工作端水平面的横向垂直度偏差值,而(l2-l1)/2即为所需的调整量;在测量出l2的位置上按(l2-l1)/2的调整量对关节臂进行调平操作;调平后再次按第一方向旋转至l1的位置进行复测,直至水平仪的读数变化在
±
0.1mm/m内时,轴心线横向垂直度调整完成;
42.s23、参见附图5、6所示,自步骤s22测量出l2的位置作为起始位置,将关节臂按第一方向旋转至home位置,并记录水平仪的偏差值为l3;继续按第一方向旋转第三设定角度,并记录水平仪的偏差值为l4,l4与l3的差值即为关节臂转动轴心线与关节臂工作端水平面的纵向垂直度偏差值,而(l4-l3)/2即为所需的调整量;在测量出l4的位置上按(l4-l3)/2的调整量对关节臂进行调平操作;调平后再次按第一方向旋转至l3的位置进行复测,直至水平仪的读数变化在
±
0.1mm/m内时,轴心线纵向垂直度调整完成;
43.s24、将关节臂上的所有调平螺钉按预设的力矩锁紧后,旋转关节臂360
°
并实时观察水平仪读数变化,若出现异常(读数变化在
±
0.1mm/m之外),则回到步骤s22重新复测并调节异常处的水平度。
44.在本实施例中,home位置是指程序设定的初始位置,即机械臂完成所有程序后停止的位置。第一方向为顺时针方向或逆时针方向。
45.在本实施例中,第一设定角度为80
°‑
100
°
,第二预设角度为160
°‑
200
°
,第三预设角度为160
°‑
200
°
。在机械臂调平时,第一预设角度越接近90
°
,第二预设角度越接近180
°
,第三预设角度越接近180
°
,对应的偏差值l1、l2、l4读数越准,越利于后续调平操作。优选的,第一设定角度为90
°
,第二预设角度为180
°
,第三预设角度为180
°
。
46.需要注意的是,因承载水平仪的平面存在加工误差以及受旋转轴的轴承间隙产生下垂影响,承载水平仪的平面与旋转轴的轴心线并非绝对相互垂直,每台机械臂的实际偏差值也不尽相同,所以在实际调平时,只要当l2=l1、l4=l3时,即认定旋转轴的轴心线垂直于工作端的水平面。
47.示例性地,关于调整量,例如,在s22中,测得l1为1.5,l2为-0.5,那调整量为:(-0.5-1.5)/2=-1。
48.当最上层的关节臂的工作端上还安装有用以夹取晶圆的晶圆片叉3时,还需对晶圆片叉进行调平。具体的,参见附图7、8所示,将各关节臂均旋转至home位置,并在晶圆片叉上放置wafer sense无线水平仪5,当测量值在
±
0.02
°
之外时,对安装有晶圆片叉的关节臂进行调平操作,然后旋转该关节臂以调整其横向、纵向的偏差值,直至wafer sense无线水平仪的读数在
±
0.02
°
以内。
49.采用本发明的动态调节方法对机械臂进行调平操作,并对调平后的机械臂工作端在不同转动位置处的水平度进行检测,检测结果如表1所示。
50.表1为机械臂在不同转动位置处的水平度
[0051][0052]
从表1中可以看出:采用本发明的动态调节方法调平后的机械臂水平度大大提高,与现有技术相比,本发明能将机械臂的动态水平度误差控制在
±
0.04
°
以内,大幅提高了机械臂在传输晶圆时的水平精度和稳定性。
[0053]
本发明首先通过底座调平能提高底座的水平度,减少因底座水平度偏差导致的对关节臂水平度的影响,使得关节臂的调平更加准确;在关节臂调平时,首先通过旋转关节臂测定出关节臂转动至不同位置时的横向垂直度偏差值,并进行横向垂直度调平操作,然后再通过旋转关节臂测定出关节臂转动至不同位置时的纵向垂直度偏差值,并进行纵向垂直度调平操作;该关节臂调平操作通过测定出关节臂在不同位置上的偏差值,并以此偏差值作为调平基础,能有效提高关节臂的调平精度,减少因关节臂各零部件加工误差导致的关节臂动态水平度变化误差大的问题,提高关节臂转动时的水平度稳定性。
[0054]
以上实施方式只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的
人了解本发明的内容并加以实施,并不能以此限制本发明的保护范围,凡根据本发明精神实质所做的等效变化或修饰,都应涵盖在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。