1.本发明涉及图像处理技术领域,具体为一种摄像头坏点检测方法及装置。
背景技术:
2.目前,摄像头已广泛应用于手机、平板/笔记本、安防、车载、医疗、监控等领域,而在摄像头使用过程中,其关键在于摄像头所采集的图像质量,因此摄像头在生产加工过程中,为保证最终图像质量,需对摄像头所采集的图像进行坏点检测。对于手机、平板/笔记本等通用摄像头而言,坏点检测为检测所采集图像各像素点的坏点(即亮点和暗点)情况,但同时存在一些非通用摄像头,其特殊的使用场景下,并不需要对整张图像内容进行关注,例如医疗领域,其只对图像中心图案需要进行关注。由于所需关注的图案多为不规则的图形,因此通常采用人工肉眼检测,检测效率和检测准确度都无法得到保障,在面对不同标准的客户要求时,无法做到不同标准的统一管理。
3.而现有技术的坏点检测主要为:通过图像中像素点的像素值进行判断,在白场场景或黑场场景下,当任一像素点的像素值与其他像素点的像素值相差过大时,该像素点损坏,判定该像素点为坏点。但其存在以下缺点:
4.1、在坏点检测过程中,会对不关注的区域进行检测,即进行无效检测,降低系统资源的有效利用率,同时也会降低坏点检测的检测效率。
5.2、在实际使用过程中,逐一计算各像素点的像素值,并与其他像素点进行比较,导致检测效率较低。同时部分像素点的损坏,并不会影响视觉上的观感,产品也存在一定的容错空间,直接将损坏的像素点判定为坏点,增加摄像头的生产加工难度和生产加工成本。
6.因此亟需一种能够提高坏点检测效率、准确且灵活地对坏点进行检测的摄像头坏点检测方法及装置。
技术实现要素:
7.本发明的目的之一在于提供一种摄像头坏点检测方法,能够提高坏点检测效率,且准确、灵活地对坏点进行检测。
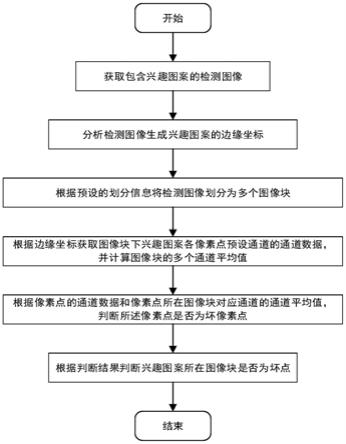
8.本发明提供的基础方案一:一种摄像头坏点检测方法,包括以下内容:获取包含兴趣图案的检测图像;还包括以下内容:
9.分析检测图像生成兴趣图案的边缘坐标;
10.根据预设的划分信息将检测图像划分为多个图像块;
11.根据边缘坐标获取图像块下兴趣图案各像素点预设通道的通道数据,并计算图像块的多个通道平均值;
12.根据像素点的通道数据和像素点所在图像块对应通道的通道平均值,判断所述像素点是否为坏像素点;
13.根据判断结果判断兴趣图案所在图像块是否为坏点。
14.名词说明:兴趣图案是指检测图像中所关注的中心区域;通道数据是指像素点rgb
中各单色通道参数;通道平均值是指统计图像块中兴趣图案对应的各像素点grb中各单色通道参数,计算出的各单色通道的参数平均值。
15.基础方案一的有益效果:
16.在进行坏点判断前,对检测图像进行分析,通过分析得知兴趣图案的边缘坐标,即得知兴趣图案在检测图像中的所处区域。
17.通过划分信息对检测图像进行划分,分别对划分的图像块进行坏像素点判定,可并行处理多个图像块的坏像素点判定,提高坏像素点检测效率,从而提高坏点检测效率。同时在坏像素点判定时,根据边缘坐标仅对兴趣图案所对应的像素点进行判定,避免了对检测图像中的无关区域进行检测,提高系统资源的有效利用率,同时进一步提高坏点检测效率。
18.每一像素点预设通道,根据预设通道获取像素点的通道数据,通过通道数据表征像素点的颜色特征。计算每一图像块的通道平均值,通过通道平均值表征图像块的平均颜色特征。通过通道数据和通道平均值判断像素点的好坏,每一像素点仅需一次判定,与现有技术相比,降低每一像素点的判定环节,提高坏像素点检测效率。
19.通过坏像素点判断结果进一步判定图像块是否为坏点,在判定时,基于不同的条件可得出不同的坏点检测结果,通过调整条件便可改变坏点检测结果,与现有技术相比,能够更加准确、灵活地对坏点进行检测,通用性强,适宜不同客户的坏点要求。
20.进一步,分析检测图像生成兴趣图案的边缘坐标,包括以下内容:
21.获取检测图像内各像素点的像素值,根据预设的双门限卡控阈值筛选像素值位于双门限卡控阈值的像素点坐标;
22.将每行像素点划分为左右像素点,根据筛选结果计算每行左右像素点的像素均值坐标;
23.根据筛选结果筛选每行左右像素点的最大坐标和最小坐标,分别计算最大坐标、最小坐标与像素均值坐标的坐标差值;
24.根据坐标差值对像素均值坐标进行补偿生成每行左右像素点的边缘坐标。
25.有益效果:在对感兴趣的区域进行分析时,其采集的检测图像包含兴趣图案,且兴趣图案位于检测图像中的中心位置,即兴趣图案的边缘位于检测图像中的两侧。通过训练获得的双门限卡控阈值对检测图像中疑似边缘的像素点进行筛选,将筛选出的像素点按每行左右划分,即取每行中心像素点,位于中心像素点两侧的像素点分别为左右像素点,以此计算两侧疑似边缘的像素点的像素均值坐标。通过计算两侧疑似边缘像素点的最大值、最小值分别与像素均值坐标的坐标差值,对像素均值坐标进行补偿,以此获得每行像素点两侧最能代表兴趣图案边缘的边缘坐标,通过边缘坐标可知兴趣图案在检测图像中的所在位置。
26.进一步,根据坐标差值对像素均值坐标进行补偿前,还包括以下内容:
27.根据预设的差值阈值判断坐标差值是否满足差值阈值,当坐标差值不满足差值阈值时,调用预设的设定差值赋值给所述坐标差值。
28.有益效果:疑似兴趣图案边缘的像素点可能是兴趣图案中的坏像素点,为避免将坏像素点作为兴趣图案边缘,对坐标差值进行判断。差值阈值为提前设定的筛选出的像素点坐标与像素均值坐标的最大差值,因此当坐标差值不满足差值阈值时,将提前预设的设
定差值赋值给对应的坐标差值,设定差值满足差值阈值,由此在对像素均值坐标补偿前,剔除兴趣图案中的坏像素点,提高兴趣图案边缘坐标的准确度。
29.进一步,根据坐标差值对像素均值坐标进行补偿生成每行左右像素点的边缘坐标,包括以下内容:
30.通过以下公式根据坐标差值对像素均值坐标进行补偿;
[0031][0032][0033]
式中,m为检测图像中的像素点的行数,left[m]、right[m]分别为第m行左右像素点的边缘坐标,left
′
[m]、right
′
[m]分别为第m行左右像素点的坐标差值,分别为第m行左右像素点的最大坐标,分别为第m行左右像素点的最小坐标;
[0034]
判断补偿后的像素均值坐标是否满足预设的边缘坐标条件,当不满足时,获取相邻行的边缘坐标,根据相邻行的边缘坐标对补偿后的像素均值进行补偿生成对应行的边缘坐标。
[0035]
有益效果:通过坐标差值对像素均值坐标进行补偿,由于兴趣图案的边缘为连续的,因此相邻行的边缘坐标之间距离较近,当相邻行的边缘坐标距离较远时,即代表边缘检测有误。本方案中,预设的边缘坐标条件即为相邻行需要满足的坐标条件,当补偿后的像素均值坐标不满足边缘坐标条件时,即代表相邻行的边缘坐标相差较远,此时无法将补偿后的像素均值作为最终边缘坐标,通过该行对应的相邻行的边缘坐标对其进行补偿,以此得到该行最终的边缘坐标,确保最终边缘坐标的准确度。
[0036]
进一步,根据边缘坐标获取图像块下兴趣图案各像素点预设通道的通道数据,并计算图像块的多个通道平均值;包括以下内容:
[0037]
根据边缘坐标获取各图像块内兴趣图案对应的像素点数量,以及各像素点对应的多个通道数据;
[0038]
根据各像素点的多个通道数据和图像块内兴趣图案的像素点数量计算图像块的多个通道平均值;
[0039]
根据各像素点的预设通道获取各像素点的通道数据,一通道数据对应一像素点。
[0040]
有益效果:通过各像素点对应的多个通道数据计算图像块的多个通道平均值,例如每一像素点对应有r、gr、gb、b四个通道数据,获取各图像块内兴趣图案对应每一像素点的四个通道数据计算图像块的四个通道平均值,以此获得各像素点的通道数据和图像块的通道平均值。与现有技术相比,本方案仅对图像块中兴趣图案所对应的像素点计算通道平均值,以及获取通道数据,减少对无关区域的处理,提高系统资源的有效利用率。
[0041]
进一步,根据像素点的通道数据和像素点所在图像块对应通道的通道平均值,判断所述像素点是否为坏像素点;包括以下内容:
[0042]
调用判断条件,判断条件包括:
[0043]
[0044]
式中,s[i][j]为第i个图像块中第j个像素点s通道的通道数据,s_aver[i]为第i个图像块与s[i][j]对应s通道的通道平均值,s通道包括r通道、gr通道、gb通道和b通道,white_threshold为预设的白点卡控浓度,black_threshold为预设的黑点卡控浓度;
[0045]
判断兴趣图案的各像素点是否满足判断条件,若是,则判定所述像素点为坏像素点。
[0046]
有益效果:通过判断条件判定像素点是否为坏像素点,当像素点指定通道的通道数据和像素点所在图像块的通道平均数据满足判定条件时,代表所述像素点为坏像素点,以此实现坏像素点的判定。
[0047]
进一步,根据判断结果判断兴趣图案所在图像块是否为坏点,包括以下内容:
[0048]
根据判断结果统计各兴趣图案所在图像块内的坏像素总量,根据预设的阈值卡控判断图像块是否为坏点;
[0049]
当图像块均非坏点时,根据预设的归类条件对坏像素点进行归类;根据归类结果判断坏像素点所在图像块是否为坏点。
[0050]
有益效果:不同项目对坏点检测要求不同,包括对坏像素点数量的要求,以及不同类型的坏像素点要求不同。阈值卡控为各图像块的坏像素点数量上限,通过阈值卡控判断各图像块中的坏像素总量是否超限,从而实现坏点检测的一级卡控。在所有图像块都不是坏点时,对图像块中的坏像素点进行归类,基于归类结果对图像块进行判定,以此实现坏点检测的二级卡控。采用本方案,通过调整阈值卡控等能够灵活地对坏点进行检测,同时通过双标准卡控能够更好的应对不同应用场景下的坏点要求,通用性强,适宜不同客户的坏点要求。
[0051]
进一步,归类条件包括同通道归类条件和不同通道归类条件,根据预设的归类条件对坏像素点进行归类;包括以下内容:
[0052]
根据不同通道对像素点重新进行排序生成各通道的通道图,根据同通道归类条件对通道图中的坏像素点进行归类;
[0053]
根据不同通道归类条件对检测图像中的坏像素点进行归类。
[0054]
有益效果:根据同通道归类条件和不同通道归类条件对坏像素点进行归类,针对不同坏像素点的类型采用不同归类条件进行归类,从而更加准确地对坏像素点进行归类,进而更准确地匹配不同客户的坏点要求。
[0055]
本发明的目的之二在于提供一种摄像头坏点检测装置。
[0056]
本发明提供基础方案二:一种摄像头坏点检测装置,包括图像采集设备和上位机,图像采集设备和上位机信号连接;
[0057]
上位机用于获取设定参数、预设参数和预设条件,图像采集设备用于根据设定参数采集白场场景或黑场场景下的图像数据,发送给上位机;
[0058]
上位机用于接收图像数据后,根据预设参数和预设条件执行权利要求1-8任一项所述的摄像头坏点检测方法。
[0059]
基础方案二的有益效果:
[0060]
图像采集设备用于采集图像数据,即获取需要进行坏点检测的图像,通过上位机执行图像坏点检测方法,从而实现坏像素点检测,进而实现坏点检测。
[0061]
采用本方案,与现有技术相比,能够降低每一像素点的判定环节,提高坏像素点检
测效率,从而提高坏点检测效率。同时能够更加准确、灵活地对坏点进行检测,通用性强,适宜不同客户的坏点要求。
[0062]
进一步,设定参数包括白场色温、白场亮度和白场曝光。
[0063]
有益效果:通过白场色温、白场亮度设置白场场景,以及通过白场曝光设置合适的曝光范围,以获取包含兴趣图案的检测图像。
附图说明
[0064]
图1为本发明一种摄像头坏点检测方法实施例的流程图;
[0065]
图2为本发明一种摄像头坏点检测方法实施例分析检测图像生成兴趣图案的边缘坐标的流程图;
[0066]
图3为本发明一种摄像头坏点检测方法实施例的预设通道示意图;
[0067]
图4为本发明一种摄像头坏点检测方法实施例根据判断结果判断兴趣图案所在图像块是否为坏点的流程图;
[0068]
图5为本发明一种摄像头坏点检测方法实施例的k1类示意图;
[0069]
图6为本发明一种摄像头坏点检测方法实施例的k2类示意图;
[0070]
图7为本发明一种摄像头坏点检测方法实施例的k3类示意图;
[0071]
图8为本发明一种摄像头坏点检测方法实施例的k4类示意图;
[0072]
图9为本发明一种摄像头坏点检测方法实施例的k5类示意图;
[0073]
图10为本发明一种摄像头坏点检测方法实施例与图3对应的r通道图;
[0074]
图11为本发明一种摄像头坏点检测方法实施例与图3对应的gr通道图;
[0075]
图12为本发明一种摄像头坏点检测方法实施例与图3对应的gb通道图;
[0076]
图13为本发明一种摄像头坏点检测方法实施例与图3对应的b通道图;
[0077]
图14为本发明一种摄像头坏点检测装置实施例的示意性框图。
具体实施方式
[0078]
下面通过具体实施方式进一步详细说明:
[0079]
实施例
[0080]
一种摄像头坏点检测方法,如附图1所示,包括以下内容:
[0081]
获取包含兴趣图案的检测图像;
[0082]
分析检测图像生成兴趣图案的边缘坐标;
[0083]
根据预设的划分信息将检测图像划分为多个图像块;
[0084]
根据边缘坐标获取图像块下兴趣图案各像素点预设通道的通道数据,并计算图像块的多个通道平均值;
[0085]
根据像素点的通道数据和像素点所在图像块对应通道的通道平均值,判断所述像素点是否为坏像素点;
[0086]
根据判断结果判断兴趣图案所在图像块是否为坏点。
[0087]
获取包含兴趣图案的检测图像,包括以下内容:
[0088]
获取若干帧分辨率为width
×
height的原始图像,原始图像中包含兴趣图案,兴趣图案为图像数据中需进行坏点识别的区域,即使用过程中图像数据的重点显示区域。计算
若干帧原始图像中对应像素点的像素平均值,生成检测图像。具体的:通过图像采集设备采集设定参数下黑场场景或白场场景的图像数据,图像数据的图像格式包括raw或yuv。采集时,采集连续若干帧图像数据作为原始图像,分辨率为width
×
height,其中width为图像宽度,height为图像长度。每一帧原始图像中包含若干像素点,像素点的个数为width
×
height,获取每一原始图像中每一像素点的grb像素值,计算每一像素点的像素平均值生成检测图像。
[0089]
分析检测图像生成兴趣图案的边缘坐标,如附图2所示,包括以下内容:
[0090]
获取检测图像内各像素点的像素值,根据预设的双门限卡控阈值筛选像素值位于双门限卡控阈值的像素点坐标;将每行像素点划分为左右像素点,根据筛选结果生成每行左右像素点的边缘坐标。双门限卡控阈值用于判断像素点对应的像素值是否异常,例如像素点可能为兴趣图案边缘,同时双门限卡控阈值根据图像数据进行设置,例如图像数据的图像格式为raw8时,由于图像数据值范围为0-255内,因此双门限卡控阈值需低于255。在本实施例中,双门限卡控阈值需高于16,双门限卡控阈值的上下限分别为30和70。
[0091]
将每行像素点划分为左右像素点,具体为将每行像素点按左右顺序划分为左像素点和右像素点,即左侧像素点和右侧像素点。
[0092]
根据筛选结果生成每行左右像素点的边缘坐标,具体包括以下内容:根据筛选结果计算每行左右像素点的像素均值坐标;根据筛选结果筛选每行左右像素点的最大坐标和最小坐标,分别计算最大坐标、最小坐标与像素均值坐标的坐标差值;根据坐标差值对像素均值坐标进行补偿生成每行左右像素点的边缘坐标。
[0093]
筛选结果为筛选出的左右像素点的像素点坐标pixel_left[m][n]和pixel_right[m][n],其中,m为检测图像中的像素点的行数,n为检测图像中的像素点的列数。
[0094]
根据筛选结果分别统计每行左右像素点的坐标之和和以及每行左右像素点的个数left_cntm和right_cntm,根据以下公式计算每行左右像素点的像素均值坐标left
′
[m]和right
′
[m]。
[0095][0096]
根据筛选结果筛选每行左右像素点的最大坐标和最小坐标,分别计算最大坐标、最小坐标与像素均值坐标的坐标差值,即得到每行左像素点最大坐标、最小坐标与像素均值坐标left
′
[m]的坐标差值和以及每行右像素点最大坐标、最小坐标与像素均值坐标right
′
[m]的坐标差值和
[0097]
根据坐标差值对像素均值坐标进行补偿生成每行左右像素点的边缘坐标,包括以下内容:通过以下公式根据坐标差值对像素均值坐标进行补偿。
[0098][0099]
式(2)中,m为检测图像中的像素点的行数,left[m]、right[m]分别为第m行左右像素点的边缘坐标,left
′
[m]、right
′
[m]分别为第m行左右像素点的坐标差值,分别为第m行左右像素点的最大坐标,分别为第m行左右像素点的最小坐标。
[0100]
判断补偿后的像素均值坐标是否满足预设的边缘坐标条件,预设的边缘坐标条件为|left[m]-left[m-1]|《φ,或|right[m]-right[m-1]|《φ,φ∈[20,50],在本实施例中,φ的取值为33。在本实施例汇总,当前行与上一行补偿后的像素均值坐标差值大于33时,即补偿后的像素均值坐标不满足边缘坐标条件。此时,获取相邻行的边缘坐标,根据相邻行的边缘坐标对补偿后的像素均值进行补偿生成对应行的边缘坐标。
[0101]
根据相邻行的边缘坐标对补偿后的像素均值进行补偿生成对应行的边缘坐标,具体为:相邻行的边缘坐标为left[m-1]、left[m 1]、right[m-1]和right[m 1],根据相邻行的边缘坐标筛选靠近每行中心的边缘坐标,根据筛选出的边缘坐标赋值给不满足边缘坐标条件的像素均值坐标。即当某一行补偿后的像素均值坐标不满足边缘坐标条件时,比较对应的left[m-1]和left[m 1],取其中数值大的边缘坐标赋值给m行的像素均值坐标作为m行左像素点的边缘坐标,比较对应的right[m-1]和right[m 1],取其中数值小的边缘坐标赋值给m行的像素均值坐标作为m行右像素点的边缘坐标。当某一行仅左像素点补偿后的像素均值坐标不满足边缘坐标条件时,仅对所述行左像素点补偿后的像素均值进行补偿。
[0102]
根据坐标差值对像素均值坐标进行补偿前,还包括以下内容:根据预设的差值阈值判断坐标差值是否满足差值阈值,在本实施例中,预设的差值阈值为50。当坐标差值不满足差值阈值时,调用预设的设定差值赋值给所述坐标差值。设定差值的取值范围为30-50,在本实施例中,预设的设定差值取值为36,即当坐标差值不满足差值阈值时,将所述坐标差值赋值为36。
[0103]
根据预设的划分信息将检测图像划分为多个图像块,包括以下内容:预设的划分信息为将检测图像划分为图像块的个数,划分信息为m
×
n,即根据预设的划分信息将检测图像划分为m
×
n个图像块。图像块的分辨率为width、height、m、n和width、height、m、n和均为整数。
[0104]
根据边缘坐标获取图像块下兴趣图案各像素点预设通道的通道数据,并计算图像块的多个通道平均值,包括以下内容:根据边缘坐标获取各图像块内兴趣图案对应的像素点数量,以及各像素点对应的多个通道数据;根据各像素点的多个通道数据和图像块内兴趣图案的像素点数量计算图像块的多个通道平均值;根据各像素点的预设通道获取各像素点的通道数据,一通道数据对应一像素点。
[0105]
根据边缘坐标获取各图像块内兴趣图案对应的像素点数量,以及各像素点对应的多个通道数据,具体为:获取图像块内的像素点坐标,判断像素点坐标是否位于边缘坐标内,即判断像素点坐标的列值是否位于对应行的两边缘坐标内,若位于,则该像素点为兴趣
图案所对应的像素点。获取各图案块中兴趣图案对应的像素点数量,以及对应像素点的多个通道数据。
[0106]
通道数据是指像素点rgb中各单色通道参数,即每一像素点具有多个通道数据,在本实施例中,每一像素点对应四个通道数据,分别为r[i][j]、gr[i][j]、gb[i][j]、b[i][j],其中i=1,2...m
×
n,i用于表征第几个图像块,j用于表征图像块中的第几个像素点,即通过i和j表征对应像素点。
[0107]
根据各像素点的多个通道数据和图像块内兴趣图案的像素点数量计算图像块的多个通道平均值,具体为:通道平均值是指统计图像块中各像素点grb中各单色通道参数,计算出的各单色通道的参数平均值。兴趣图案所对应的图像块分为不包含边缘坐标的图像块和包含边缘坐标的图像块。
[0108]
对于包含边缘坐标的图像块,根据图像块中兴趣图案对应的像素点数量和兴趣图案对应像素点的多个通道数据,计算多个通道平均值,此时像素点数量小于
[0109]
对于不包含边缘坐标的图像块,根据每一图像块的像素点数量和像素点对应的多个通道数据分别计算多个通道平均值raver[i]、graver[i]、gbaver[i]、baver[i],计算公式如下:
[0110][0111][0112][0113][0114]
预设通道用于确定表征每一像素点的通道数据,以四个像素点为一组,每组像素点的预设通道分别为r、gr、gb、b。在本实施例中,将图像块左上角呈田字型的四个像素点作
为一组,该组左上像素点预设通道为r,右上像素点预设通道为gr,左下像素点预设通道为gb,右下像素点预设通道为b,以该组为例依次填充图像块中所有像素点的预设通道,如附图3所示,图中所示一格代表一像素点。
[0115]
根据各像素点的预设通道获取各像素点的通道数据,一通道数据对应一像素点。即当像素点的预设通道为r时,获取该像素点的r[i][j]作为对应的通道数据。
[0116]
根据像素点的通道数据和像素点所在图像块对应通道的通道平均值,判断所述像素点是否为坏像素点,包括以下内容:
[0117]
调用判断条件,判断条件包括:
[0118][0119]
式(7)中,s[i][j]为第i个图像块中第j个像素点s通道的通道数据,s_aver[i]为第i个图像块与s[i][j]对应s通道的通道平均值,s通道包括r通道、gr通道、gb通道和b通道,white_threshold为预设的白点卡控浓度,black_threshold为预设的黑点卡控浓度;
[0120]
判断兴趣图案的各像素点是否满足判断条件,若是,则判定所述像素点为坏像素点,反之。则判定所述像素点为好像素点。具体为:以预设通道为r通道的像素点为例,则公式中的s[i][j]为r[i][j],s_aver[i]为r_aver[i],将该像素点所在图像块的通道平均值raver[i]代入r_aver[i],通过计算判断是否满足判断条件,若满足,则该像素点为坏像素点。
[0121]
根据判断结果判断兴趣图案所在图像块是否为坏点,如附图4所示,包括以下内容:根据判断结果统计各兴趣图案所在图像块内的坏像素总量,根据预设的阈值卡控判断图像块是否为坏点;当图像块均非坏点时,根据预设的归类条件对坏像素点进行归类;根据归类结果判断坏像素点所在图像块是否为坏点。
[0122]
预设的阈值卡控为图像块内能够接受的坏像素点的最大值,根据预设的阈值卡控判断图像块是否为坏点,具体为:判断坏像素总量是否大于阈值卡控,若大于,则判定所述图像块为坏点。记录并显示所述图像块。
[0123]
当图像块均非坏点时,即兴趣图案所在图像块的坏像素总量均未大于阈值卡控,此时,根据预设的归类条件对坏像素点进行归类。
[0124]
归类条件的数量为多个,多个归类条件的优先级不同,对坏像素点进行归类时,依次根据优先级对坏像素点进行归类。归类条件包括同通道归类条件和不同通道归类条件,在本实施例中,同通道归类条件包括k1归类条件和k2归类条件,不同通道归类条件包括k3归类条件、k4归类条件和k5归类条件,k1至k5归类条件的优先级依次降低。
[0125]
k1归类条件为:以坏像素点为中心,同通道5
×
5矩阵中坏像素点的数量大于或等于2,如附图5所示。k2归类条件为:以坏像素点为中心,同通道5
×
5矩阵中坏像素点的数量等于1,以及满足k1归类条件的坏像素点,如附图6所示。k3归类条件为:以坏像素点为中心,不同通道5
×
5矩阵中坏像素点的数量大于或等于2,以及满足k2归类条件的坏像素点,如附图7所示。k4归类条件为:以坏像素点为中心,不同通道5
×
5矩阵中坏像素点的数量等于1,以及满足k3归类条件的坏像素点,如附图8所示。k5归类条件为:以坏像素点为中心,不同通道5
×
5矩阵中坏像素点的数量等于0,以及满足k4归类条件的坏像素点,如附图9所示。
[0126]
根据预设的归类条件对坏像素点进行归类,包括以下内容:根据不同通道对像素
点重新进行排序生成各通道的通道图,根据同通道归类条件对通道图中的坏像素点进行归类;根据不同通道归类条件对检测图像中的坏像素点进行归类。
[0127]
根据不同通道对像素点重新进行排序生成各通道的通道图,具体为:在本实施例中,通道包括r、gr、gb、b,即通道图分别为r通道图、gr通道图、gb通道图、b通道图,分别如图10、11、12、13所示。
[0128]
根据同通道归类条件对通道图中的坏像素点进行归类,具体为:以预设通道为r通道的坏像素点为例,判断是否满足k1归类条件,获取r通道图中以该坏像素为中心的5
×
5矩阵,统计5
×
5矩阵中除该坏像素点以外其余8个像素点的好坏情况,当坏像素点的数量大于或等于2时,满足k1归类条件,将该像素点归类为k1类,反之,则根据k2归类条件继续归类。
[0129]
根据不同通道归类条件对检测图像中的坏像素点进行归类,具体为:以预设通道为r通道的坏像素点为例,判断是否满足k3归类条件,获取检测图像中以该坏像素为中心的5
×
5矩阵,统计5
×
5矩阵中除该坏像素点以及预设通道为r通道的像素点以外其余20个像素点的好坏情况,当坏像素点的数量大于或等于2时,满足k3归类条件,将该像素点归类为k3类,以及将根据k2归类条件归类的坏像素点归类为k3类,反之,则根据k4归类条件继续归类。
[0130]
归类结果包括各坏像素点类型下的坏像素点数量,根据归类结果判断坏像素点所在图像块是否为坏点,具体为:根据优先级从高到低依次判断各坏像素点类型下的坏像素点数量是否达到预设的卡控个数阈值,若是,则判断对应坏像素点类型下的坏像素点所在图像块为坏点,即兴趣图案中存在坏点,此时记录并显示所述归类结果对应的坏点,反之,则兴趣图案中无坏点。卡控个数阈值根据客户的坏点要求进行提前预设,通过改变卡控个数阈值适宜不同客户的坏点要求。
[0131]
本技术还提供一种摄像头坏点检测装置,如附图14所示,包括环境控制设备、图像采集设备和上位机,环境控制设备和图像采集设备分别与上位机信号连接。上位机用于获取设定参数、预设参数和预设条件;环境控制设备用于提供黑场场景,用于根据设定参数提供白场场景;图像采集设备用于根据设定参数采集白场场景或黑场场景下的图像数据,发送给上位机;上位机用于接收图像数据后,根据预设参数和预设条件执行上述摄像头坏点检测方法。
[0132]
设定参数包括白场色温、白场亮度和白场曝光,根据白场色温和白场亮度对环境控制设备进行设置,以提供白场场景,根据白场曝光对图像采集设备进行设置,以选择合适的曝光范围。在本实施例中,白场色温取值为5100
±
100k,白场亮度取值为1000
±
100lux,白场曝光为g通道取值为150-200。
[0133]
预设参数为上述摄像头坏点检测方法中所涉及的预设值,例如双门限卡控阈值、差值阈值、设定差值、阈值卡控、卡控个数阈值等;预设条件为上述摄像头坏点检测方法中所涉及的预设信息,例如划分信息、边缘坐标条件、归类条件等。
[0134]
环境控制设备用于提供白场场景或黑场场景,具体的,环境控制设备包括光源和黑罩,光源用于根据上位机设置白场色温和白场亮度,以提供白场场景。黑罩用于遮盖图像采集设备,以提供黑场场景,此时黑罩中没有任何光线,即亮度为0lux。
[0135]
图像采集设备包括待测摄像头模组、摄像头治具和摄像头测试盒,待测摄像头模组放置在摄像头治具上,摄像头测试盒分别与待测摄像头模组、上位机信号连接,具体的,
待测摄像头模组与摄像头测试盒通过数据传输线连接,摄像头测试盒与上位机通过光纤数据线连接。
[0136]
采集白场场景下的图像数据时,光源贴近待测摄像头模组,此时待测摄像头模组的镜头与光源距离低于2公分。待测摄像头模组用于根据上位机设置白场曝光,采集白场场景下的图像数据;还用于黑罩遮盖时,采集黑场场景下的图像数据。摄像头测试盒用于将待测摄像头模组采集的图像数据发送给上位机。
[0137]
上位机用于接收图像数据后,根据预设参数和预设条件执行上述摄像头坏点检测方法。上位机还用于执行上述摄像头坏点检测方法后,显示检测结果,即当兴趣图案中存在坏点时,显示所述坏点。在其他实施例中,上位机还用于显示坏点情况,坏点情况包括坏点内的坏像素总量或坏点的类型。根据阈值卡控判断图像块为坏点时,坏点情况包括坏点内的坏像素总量;根据归类结果判断坏像素点所在图像块为坏点时,坏点情况包括坏点的类型。
[0138]
以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。