1.本发明涉及光学技术领域,尤其涉及一种基于非傍轴坐标变换的涡旋光模式检测方法及系统。
背景技术:
2.涡旋光是一种携带有轨道角动量的光束,由于其独特的物理性质,广泛应用于超分辨成像、微粒操控、量子信息存储等领域。近年来,人们通过研究还发现,涡旋光在理论上存在无穷个正交模式,通过模式复用技术能有效提高单通道的通信容量,非常适合用于下一代光纤通信系统。
3.在涡旋光的应用中,大部分都需要检测涡旋光的模式。一种简单有效的方法是使用光学坐标变换。光学坐标变换可以根据射线模型将入射光按照特定的坐标关系映射到输出平面,从而实现光场的变换。实现光学坐标变换需要两个特殊的相位板,第一个相位板被称为光学变换器,用于实现输入和输出光场的坐标映射。第二个相位板为相位修正器,用来消除光学变换器引入的调制相位和光场在两个相位板之间传播时产生的畸变相位。
4.在2010年,光学坐标变换被首次应用于轨道角动量(oam)的分离检测,其采用对数-极坐标变换将涡旋光变换为具有对应相位梯度的平面波,并利用傅里叶变换透镜将平面波聚焦在不同的空间位置上,从而实现oam分离检测。对数-极坐标映射实现简单,但相邻oam模式在分离后还存在串扰问题。后来有文献报道了一种螺旋坐标变换方法,其沿着螺旋路径将入射光展开并映射到输出平面,从根本上消除了对数-极坐标变换的串扰问题。
5.目前大部分基于光学坐标变换设计的器件需要满足傍轴近似条件,此时光学变换器和相位修正器相距较远,不利于器件的集成。另一方面,器件性能依赖于两个相位板与入射光的精确对准,而传统的分立器件难以解决这一问题。在2019年,有文献报道了一种可有效提高对准精度的反射式器件,但是由于光学变换器和相位修正器在横向位置上相距过大,已不满足傍轴近似条件。
技术实现要素:
6.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是提供一种基于非傍轴坐标变换的涡旋光模式检测方法及系统,以克服傍轴近似下的光学坐标变换的缺点,提高涡旋光模式检测系统的集成度和工作性能,实现简单高效的涡旋光模式检测。
7.为实现上述目的,本发明提供了一种基于非傍轴坐标变换的涡旋光模式检测方法,包括以下步骤:
8.s1:将携带有轨道角动量的涡旋光输入到第一个相位板,第一个相位板位于平面(x,y);
9.s2:经过第一个相位板后,光束以特定的角度出射,同时沿着螺旋路径展开,形成长条型光斑;
10.s3:在反射层的作用下,光束改变传播方向并经过第二个相位板以消除非傍轴螺
旋变换引入的畸变相位,第二个相位板位于平面(u,v);
11.s4:经过第二个相位板的调制后,光束通过凸透镜并会聚在凸透镜后焦平面的不同空间位置,所述凸透镜后焦平面位于平面(xm,ym)。
12.进一步的,所述步骤s1中第一个相位板位于平面(x,y),其相位分布q(x,y)可用偏微分方程组表示:
[0013][0014]
上式中,k是入射光在第一和第二个相位板之间的传播常数,d1和d2分别是第一和第二个相位板与反射层的垂直距离,所述的(u0,v0)与坐标映射有关,满足:
[0015][0016]
其中a和r0是与螺旋线相关的参数,β是光斑尺寸缩放参数,su和sv分别是光束在第二个相位板所在平面(u,v)沿着u和v轴的偏移量,(r,θ)为平面(x,y)的螺旋极坐标形式,满足:
[0017][0018]
其中表示取整操作,半径r和角度θ
p
分别满足和θ
p
=tan-1
(y/x)。
[0019]
进一步的,所述步骤s2中光束经过第一个相位板后的出射角度在球坐标下可表示为:
[0020][0021]
其中,d1和d2分别是第一和第二个相位板与反射层的垂直距离,su和sv分别是光束在第二个相位板所在平面(u,v)沿着u和v轴的偏移量。
[0022]
进一步的,所述步骤s3中第二个相位板位于平面(u,v),其相位分布p(u,v)可表示为:
[0023]
p(u,v)=-{tan-1
[im(e1)/re(e1)]-tan-1
[im(e0)/re(e0)]}
[0024]
其中im和re分别表示虚部和实部,e0是入射到第一个相位板的电场,e1是入射到第二个相位板的电场,两者满足:
[0025][0026]
上式中,a为涡旋光的复振幅,i为虚数,l为轨道角动量的拓扑荷数,f和f-1
分别是傅里叶变换和逆傅里叶变换操作,kz是入射光传播常数k沿着z方向的分量。
[0027]
进一步的,所述步骤s4中经过第二个相位板和凸透镜后的光束会聚在凸透镜后焦平面(xm,ym)上,满足:
[0028][0029]
上式中,f是凸透镜的焦距,λ是入射光的波长,β是光斑尺寸缩放参数,l为轨道角动量的拓扑荷数。
[0030]
进一步的,所述第一个相位板平面(x,y)、反射层、平面(u,v)和平面(xm,ym)相互平行,同时平面(x,y)和平面(u,v)的中心坐标重合。
[0031]
本发明还提供一种基于非傍轴坐标变换的涡旋光模式检测系统,包括非傍轴螺旋坐标变换模块、反射层和光强检测模块,其中:
[0032]
所述的非傍轴螺旋坐标变换模块由两个相位板组成,其中第一个相位板位于平面(x,y),第二个相位板位于平面(u,v);
[0033]
所述的光强检测模块由凸透镜和相机组成,所述凸透镜的前焦平面和后焦平面分别与平面(u,v)和平面(xm,ym)重叠,所述的相机放置在平面(xm,ym)上。
[0034]
进一步的,所述第一个相位板、第二个相位板用空间光调制器、超构表面和衍射光学元件实现。
[0035]
进一步的,所述的反射层使用不限于金、银、铝材料制成的平面反射镜来实现。
[0036]
本发明的有益效果是:
[0037]
本发明利用非傍轴近似的螺旋坐标变换,在高精度检测涡旋光模式的同时,减小了光学变换器和相位修正器的距离,提高了系统的集成度。此外通过反射式设计,有效提高光学变换器和相位修正器的对准精度,提高了系统的工作性能。
[0038]
以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
[0039]
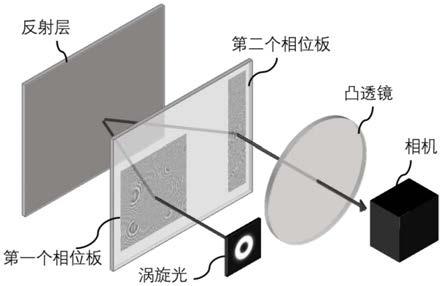
图1为实施例中利用非傍轴螺旋变换检测涡旋光模式的示意图。
[0040]
图2为实施例中系统组件的空间位置说明。
[0041]
图3为实施例的实物图。
[0042]
图4为实施例中第一个相位板的结构图。
[0043]
图5为实施例中测试光束在第二个相位板和相机所在平面的光强分布。
[0044]
图6为实施例中在聚焦光斑中心沿着水平方向提取的光强分布。
具体实施方式
[0045]
一种基于非傍轴坐标变换的涡旋光模式检测方法,包括以下步骤:
[0046]
s1:将携带有轨道角动量的涡旋光输入到第一个相位板,第一个相位板位于平面(x,y);
[0047]
s2:经过第一个相位板后,光束以特定的角度出射,同时沿着螺旋路径展开,形成长条型光斑;
[0048]
s3:在反射层的作用下,光束改变传播方向并经过第二个相位板以消除非傍轴螺旋变换引入的畸变相位,第二个相位板位于平面(u,v);
[0049]
s4:经过第二个相位板的调制后,光束通过凸透镜并会聚在凸透镜后焦平面的不同空间位置,凸透镜后焦平面位于平面(xm,ym)。
[0050]
本实施例中,步骤s1中第一个相位板位于平面(x,y),其相位分布q(x,y)可用偏微分方程组表示:
[0051][0052]
上式中,k是入射光在第一和第二个相位板之间的传播常数,d1和d2分别是第一和第二个相位板与反射层的垂直距离,(u0,v0)与坐标映射有关,满足:
[0053][0054]
其中a和r0是与螺旋线相关的参数,β是光斑尺寸缩放参数,su和sv分别是光束在第二个相位板所在平面(u,v)沿着u和v轴的偏移量,(r,θ)为平面(x,y)的螺旋极坐标形式,满足:
[0055][0056]
其中表示取整操作,半径r和角度θ
p
分别满足和θ
p
=tan-1
(y/x)。
[0057]
本实施例中,步骤s2中光束经过第一个相位板后的出射角度在球坐标下可表示为:
[0058][0059]
其中,d1和d2分别是第一和第二个相位板与反射层的垂直距离,su和sv分别是光束在第二个相位板所在平面(u,v)沿着u和v轴的偏移量。
[0060]
本实施例中,步骤s3中第二个相位板位于平面(u,v),其相位分布p(u,v)可表示为:
[0061]
p(u,v)=-{tan-1
[im(e1)/re(e1)]-tan-1
[im(e0)/re(e0)]}
[0062]
其中im和re分别表示虚部和实部,e0是入射到第一个相位板的电场,e1是入射到第二个相位板的电场,两者满足:
[0063][0064]
上式中,a为涡旋光的复振幅,i为虚数,l为轨道角动量的拓扑荷数,f和f-1
分别是傅里叶变换和逆傅里叶变换操作,kz是入射光传播常数k沿着z方向的分量。
[0065]
本实施例中,步骤s4中经过第二个相位板和凸透镜后的光束会聚在凸透镜后焦平面(xm,ym)上,满足:
[0066][0067]
上式中,f是凸透镜的焦距,λ是入射光的波长,β是光斑尺寸缩放参数,l为轨道角动量的拓扑荷数。
[0068]
本实施例中,第一个相位板平面(x,y)、反射层、平面(u,v)和平面(xm,ym)相互平行,同时平面(x,y)和平面(u,v)的中心坐标重合。
[0069]
实施例2
[0070]
如图1和图2所示,本发明还提供一种基于非傍轴坐标变换的涡旋光模式检测系统,包括非傍轴螺旋坐标变换模块、反射层和光强检测模块,其中:
[0071]
非傍轴螺旋坐标变换模块由两个相位板组成,其中第一个相位板位于平面(x,y),第二个相位板位于平面(u,v);其中第一个相位板被称为光学变换器,其将涡旋光沿着螺旋线路径展开,形成长条型光斑;第二个相位板被称为相位修正器,其作用是消除坐标变换引入的畸变相位。光强检测模块由凸透镜和相机组成,凸透镜的前焦平面和后焦平面分别与平面(u,v)和平面(xm,ym)重叠,相机放置在平面(xm,ym)上。
[0072]
第一个相位板位于平面(x,y),其相位分布q(x,y)可用偏微分方程组表示:
[0073][0074]
上式中,k是入射光在第一和第二个相位板之间的传播常数,d1和d2分别是第一和第二个相位板与反射层的垂直距离。所述的(u0,v0)与坐标映射有关,满足:
[0075][0076]
其中a和r0是与螺旋线相关的参数,β是光斑尺寸缩放参数,su和sv分别是入射光在
第二个相位板所在平面(u,v)沿着u和v轴的偏移量。(r,θ)为平面(x,y)的螺旋极坐标形式,满足:
[0077][0078]
其中表示取整操作,半径r和角度θ
p
分别满足和θ
p
=tan-1
(y/x)。
[0079]
第二个相位板位于平面(u,v),其相位分布p(u,v)可表示为:
[0080]
p(u,v)=-{tan-1
[im(e1)/re(e1)]-tan-1
[im(e0)/re(e0)]}
[0081]
其中im和re分别表示虚部和实部,e0是入射到第一个相位板的电场,e1是入射到第二个相位板的电场,两者满足:
[0082][0083]
上式中,a为涡旋光的复振幅,l为轨道角动量的拓扑荷数,f和f-1
分别是傅里叶变换和逆傅里叶变换操作,kz是入射光传播常数k沿着z方向的分量。
[0084]
在本次实施例中,第一个相位板和第二个相位板用超构表面实现,如图3和图4所示,同时两个相位板所在平面重合,即d1=d2。另外,第一个相位板和第二个相位板还可用空间光调制器或者衍射光学元件实现。
[0085]
反射层用来改变入射光的传输方向,可使用金、银、铝等材料制成的反射镜来实现。光强检测模块包含凸透镜和相机,凸透镜将带有线性梯度相位的光束聚焦在后焦平面对应的位置上,相机则用来检测凸透镜后焦平面上的光强分布。
[0086]
本次实施例一共测试了5个涡旋光模式,对应的轨道角动量拓扑荷数分别是l=-2,-1,0,1,2。图4中白色虚线方框表示模式为-2的涡旋光的光强分布。入射光首先经过第一个相位板,在非傍轴螺旋变换的作用下,以特定的角度出射,同时在传输过程中,光束沿着螺旋路径逐渐展开。在反射层的作用下,光束传播到第二个相位板,此时光束的光强分布如图5(a)所示。经过第二个相位板调制后,不同模式的涡旋光被转换为带有不同线性梯度相位的平面波。经过凸透镜后,光束被聚焦在凸透镜的后焦平面(xm,ym)上,如图5(b)所示。可以看到,不同模式的涡旋光被聚焦在对应的位置上,满足:
[0087][0088]
沿着xm方向,提取光斑中心的光强分布,如图6所示。可以看到,相邻模式的涡旋光被准确分开,没有出现重叠情况,因此本发明能实现高精度的涡旋光模式检测。
[0089]
以上详细描述了本发明的较佳具体实施例。本领域的普通技术人员无需创造性劳动就可以根据本发明的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。