1.本实用新型涉及高铁施工用定位装置,具体是一种有砟轨道接触网测量用的轨面定位装置。
背景技术:
2.电气化铁路施工标准中,特别是设计时速300km-350km的路线标准中,对接触网悬挂高度的精度要求较高,其吊弦采用整体不可调吊弦,吊弦的计算多采用计算软件来完成。影响吊弦计算精度的因素较多,主要有线路参数、腕臂偏斜、拉出值、承力索高度等。其中,承力索高度,即承力索至轨道轨面的垂直距离,是通过现场测量而得到。
3.然而实践表明,现有承力索高度测量时存在以下问题:由于有砟轨道的铺设精调往往滞后于接触网上部结构的安装施工,在接触网上部结构施工前轨道不能达到设计标准,因此在轨面各种参数没有到位的情况下所测得的承力索高度存在误差,导致线路精调完成后,接触网实际高度、吊弦设计均不能满足验收标准或达不到设计要求,致使接触网后期调整工作量大。基于此,有必要发明一种有砟轨道接触网测量用的轨面定位装置,将轨道轨面定位至设计高度,以消除由于轨道轨面不到位带来的影响。
技术实现要素:
4.本实用新型为了解决现有承力索高度测量时轨道实际轨面高度与设计轨面高度不一致导致测量误差大的问题,提供了一种有砟轨道接触网测量用的轨面定位装置。
5.本实用新型是采用如下技术方案实现的:
6.一种有砟轨道接触网测量用的轨面定位装置,包括底板,底板的上表面设置有剪叉式升降架,剪叉式升降架的顶端部设置有与底板平行且右部伸出底板的轨面定位板;剪叉式升降架的旁侧设置有驱动其升降的驱动机构;剪叉式升降架的右方沿竖向设置有位于轨面定位板前侧的可伸缩的刻度尺,刻度尺的底部铰接于底板。
7.进一步地,所述剪叉式升降架包括两个前后平行分布的剪叉支架和两根左右分布的纵向枢轴;所述剪叉支架包括第i剪臂与第ii剪臂,第i剪臂的顶端部铰接于轨面定位板的下表面、底端部铰接于底板的上表面;第ii剪臂的顶端部滑动接触于轨面定位板的下表面、底端部滑动接触于底板的上表面;第i剪臂、第ii剪臂均为两段式剪臂;第i剪臂的臂杆通过位于右侧的纵向枢轴铰接;第ii剪臂的臂杆通过位于左侧的纵向枢轴铰接。
8.进一步地,所述驱动机构为设置于两个剪叉支架之间的横向放置的调节螺杆,调节螺杆的左部螺纹连接于位于左侧的纵向枢轴;调节螺杆的右部螺纹连接于位于右侧的纵向枢轴;调节螺杆左部的螺纹方向与调节螺杆右部的螺纹方向相反;调节螺杆的左端部固定套设有圆柱形的调节块。
9.进一步地,所述驱动机构包括伸缩式液压缸和与伸缩式液压缸连通的液压泵;所述液压泵为手动液压泵;所述伸缩式液压缸设置于两个剪叉支架之间,且伸缩式液压缸的底座的底部通过铰接座铰接于底板的上表面;两个剪叉支架之间固定连接有连接杆,伸缩
式液压缸的活塞杆的顶端部转动套设于连接杆的中部。
10.进一步地,所述刻度尺包括位于下侧的中空的下尺筒和与下尺筒套接的上尺板;下尺筒的前外侧壁、上尺板的前侧壁均设置有刻度槽;下尺筒的后侧壁旋拧有尾端部抵触于上尺板的锁定螺母。
11.进一步地,下尺筒底部通过阻尼转轴铰接于底板。
12.进一步地,第i剪臂与轨面定位板、第i剪臂与底板均通过铰接座i铰接。
13.进一步地,所述轨面定位板的厚度为1mm。
14.本实用新型结构设计合理可靠,实现了定位钢轨轨面设计高度的目的,而且轨面定位板上升平稳,上升高度可控,有效提高了定位精度高,进而提高了承力索高度的测量精度,大幅度减少了接触网后期调整的工作量,节省了人力与时间,同时轨面定位板上升速度可控,调节操作便捷,增加了定位时的操作便捷性,有效提高了定位效率,具有方便收纳、实用性强的优点,可适用于接触网测量中承力索高度的测量。
附图说明
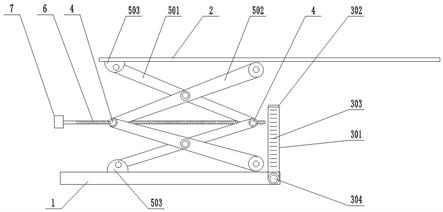
15.图1是本实用新型中驱动机构为调节螺杆时的结构示意图;
16.图2是图1的侧视示意图;
17.图3是本实用新型中驱动机构为调节螺杆时的使用状态参考图;
18.图4是图3的俯视示意图;
19.图5是本实用新型中驱动机构为伸缩式液压缸时的结构示意图;
20.图6是本实用新型中驱动机构为伸缩式液压缸时的使用状态参考图;
21.图7是本实用新型中剪叉支架的结构示意图;
22.图8是本实用新型中调节螺杆的结构示意图;
23.图9是本实用新型中刻度尺的结构示意图。
24.图中,1-底板,2-轨面定位板,3-刻度尺,301-下尺筒,302-上尺板,303-刻度槽,304-阻尼转轴,4-纵向枢轴,501-第i剪臂,502-第ii剪臂,503-铰接座i,6-调节螺杆,7-调节块,8-伸缩式液压缸,9-液压泵,10-连接杆,11-钢轨。
具体实施方式
25.实施例1
26.一种有砟轨道接触网测量用的轨面定位装置,如附图1-附图4所示,包括底板1,底板1的上表面设置有剪叉式升降架,剪叉式升降架的顶端部设置有与底板1平行且右部伸出底板1的轨面定位板2;剪叉式升降架的旁侧设置有驱动其升降的驱动机构;剪叉式升降架的右方沿竖向设置有位于轨面定位板2前侧的可伸缩的刻度尺3,刻度尺3的底部铰接于底板1。
27.本实用新型中通过将轨面定位板2抬升至钢轨11轨面的设计高度,实现对钢轨11轨面定位的目的;剪叉式升降架、驱动机构的组合结构设计能够带动轨面定位板2向上移动,实现抬升轨面定位板2的目的;刻度尺3的结构设计能够对轨面定位板2的抬升高度进行计量,增加了定位精度。
28.工作时,首先使用gps测量仪对钢轨11的轨面高度进行测量,并将测量值与钢轨11
设计轨面高度值进行比较,得到钢轨11轨面需抬高的高度值;接着将本轨面定位装置放置于钢轨11的旁侧,使得轨面定位板2的下表面贴合于钢轨11的轨顶,放置时应尽量靠近钢轨11,且放置平稳;然后调节刻度尺3的长度,使得刻度尺3能够指示至钢轨11轨面设计高度处,并进行标记,而后通过驱动机构缓慢提升剪叉式升降架的高度,剪叉式升降架高度提升带动轨面定位板2向上移动,直至轨面定位板2与钢轨11轨面设计高度齐平,由此实现钢轨11设计轨面的定位;当两根钢轨11的轨面均定位至设计高度时,轨道轨面高度即达到设计高度,而后可以进行承力索高度的测量,克服了现有承力索高度测量时轨道实际轨面高度与设计轨面高度不一致导致测量误差大的问题。
29.如附图1、附图3、附图7所示,所述剪叉式升降架包括两个前后平行分布的剪叉支架和两根左右分布的纵向枢轴4;所述剪叉支架包括第i剪臂501与第ii剪臂502,第i剪臂501的顶端部铰接于轨面定位板2的下表面、底端部铰接于底板1的上表面;第ii剪臂502的顶端部滑动接触于轨面定位板2的下表面、底端部滑动接触于底板1的上表面;第i剪臂501、第ii剪臂502均为两段式剪臂;第i剪臂501的臂杆通过位于右侧的纵向枢轴4铰接;第ii剪臂502的臂杆通过位于左侧的纵向枢轴4铰接。
30.该结构设计使得轨面定位板2在抬升过程中始终与底板1平行,实现了轨面定位板2的平行、稳定上升,进一步提高了本定位装置的定位精度。
31.如附图1、附图2、附图3、附图4、附图8所示,所述驱动机构为设置于两个剪叉支架之间的横向放置的调节螺杆6,调节螺杆6的左部螺纹连接于位于左侧的纵向枢轴4;调节螺杆6的右部螺纹连接于位于右侧的纵向枢轴4;调节螺杆6左部的螺纹方向与调节螺杆6右部的螺纹方向相反;调节螺杆6的左端部固定套设有圆柱形的调节块7。
32.工作时,作业人员转动调节块7,带动调节螺杆6转动,由此缩短两根纵向枢轴4的间距,纵向枢轴4间距缩短的同时两个剪叉支架的开合程度改变,由此实现抬升轨面定位板2的目的。该结构设计使得轨面定位板2能够平稳、连续上升,且上升速度可调,增加了本定位装置使用时的操作便捷性。
33.如附图1、附图2、附图3、附图9所示,所述刻度尺3包括位于下侧的中空的下尺筒301和与下尺筒301套接的上尺板302;下尺筒301的前外侧壁、上尺板302的前侧壁均设置有刻度槽303;下尺筒301的后侧壁旋拧有尾端部抵触于上尺板302的锁定螺母。
34.该结构设计实现了刻度尺3的可伸缩功能,且使得刻度尺3的长度可锁定,进一步提升了本定位装置的结构可靠性。
35.如附图1、附图3、附图9所示,下尺筒301底部通过阻尼转轴304铰接于底板1。
36.该结构设计一是使得刻度尺3在使用时能够稳定直立,进一步保证了定位精度,二是在使用完成后将刻度尺3收回,增加了本定位装置的可收纳性能。
37.如附图1、附图2、附图3、附图7所示,第i剪臂501与轨面定位板2、第i剪臂501与底板1均通过铰接座i503铰接。
38.所述轨面定位板2的厚度为1mm。
39.该结构设计使得定位、测量过程中由轨面定位板2带来误差可控,进一步提高了本定位装置的定位精度,进而保证了承力索高度测量的准确性。
40.实施例2
41.一种有砟轨道接触网测量用的轨面定位装置,如附图5、附图6所示,包括底板1,底
板1的上表面设置有剪叉式升降架,剪叉式升降架的顶端部设置有与底板1平行且右部伸出底板1的轨面定位板2;剪叉式升降架的旁侧设置有驱动其升降的驱动机构;剪叉式升降架的右方沿竖向设置有位于轨面定位板2前侧的可伸缩的刻度尺3,刻度尺3的底部铰接于底板1。
42.如附图5、附图6、附图7所示,所述剪叉式升降架包括两个前后平行分布的剪叉支架和两根左右分布的纵向枢轴4;所述剪叉支架包括第i剪臂501与第ii剪臂502,第i剪臂501的顶端部铰接于轨面定位板2的下表面、底端部铰接于底板1的上表面;第ii剪臂502的顶端部滑动接触于轨面定位板2的下表面、底端部滑动接触于底板1的上表面;第i剪臂501、第ii剪臂502均为两段式剪臂;第i剪臂501的臂杆通过位于右侧的纵向枢轴4铰接;第ii剪臂502的臂杆通过位于左侧的纵向枢轴4铰接。
43.如附图5、附图6所示,所述驱动机构包括伸缩式液压缸8和与伸缩式液压缸8连通的液压泵9;所述液压泵9为手动液压泵;所述伸缩式液压缸8设置于两个剪叉支架之间,且伸缩式液压缸8的底座的底部通过铰接座铰接于底板1的上表面;两个剪叉支架之间固定连接有连接杆10,伸缩式液压缸8的活塞杆的顶端部转动套设于连接杆10的中部。
44.工作时,作业人员转动液压泵9的摇杆,带动伸缩式液压缸8的活塞杆伸长,进而带动连接杆10向上移动,连接杆10向上移动的同时两个剪叉支架的开合程度改变,由此实现抬升轨面定位板2的目的。该结构设计使得轨面定位板2能够平稳、连续上升,且上升速度可调,增加了本定位装置使用时的操作便捷性。
45.如附图5、附图6、附图9所示,所述刻度尺3包括位于下侧的中空的下尺筒301和与下尺筒301套接的上尺板302;下尺筒301的前外侧壁、上尺板302的前侧壁均设置有刻度槽303;下尺筒301的后侧壁旋拧有尾端部抵触于上尺板302的锁定螺母。
46.如附图5、附图6、附图9所示,下尺筒301底部通过阻尼转轴304铰接于底板1。
47.如附图5、附图6、附图7所示,第i剪臂501与轨面定位板2、第i剪臂501与底板1均通过铰接座i503铰接。
48.所述轨面定位板2的厚度为1mm。
49.具体实施过程中,相邻两个刻度槽303的间距为1mm。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
