技术特征:
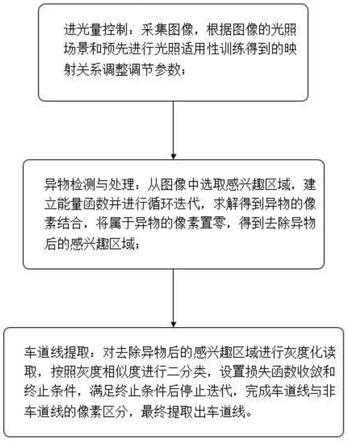
1.一种基于感兴趣区域的车道线自动提取方法,其特征在于,包括以下步骤:进光量控制:采集图像,根据图像的光照场景和预先进行光照适用性训练得到的映射关系调整调节参数;异物检测与处理:从图像中选取感兴趣区域,建立能量函数并进行循环迭代,求解得到异物的像素结合,将属于异物的像素置零,得到去除异物后的感兴趣区域;车道线提取:对去除异物后的感兴趣区域进行灰度化读取,按照灰度相似度进行二分类,设置损失函数收敛和终止条件,满足终止条件后停止迭代,完成车道线与非车道线的像素区分,最终提取出车道线。2.根据权利要求1所述的一种基于感兴趣区域的车道线自动提取方法,其特征在于,所述光照适用性训练的过程包括:设置视觉传感器获取的图像尺寸为w
×
h,灰度级范围[0,l-1],获取不同光照场景下的交通标识包围框,并选取该包围框内的像素作为感兴趣区域,在不同光照场景下选取调节参数以提取车道线,并依此建立调节参数与光照场景的映射关系。3.根据权利要求2所述的一种基于感兴趣区域的车道线自动提取方法,其特征在于,所述在不同光照场景下选取调节参数以提取车道线,并依此建立调节参数与光照场景的映射关系,包括:计算各个同类感兴趣区域在各种光照环境下的灰度级分布情况:p(s
k
)=g
k
;其中,s
k
表示某像素属于第k个灰度级,g
k
表示该图像中属于灰度级k的像素总数,对获取的rgb图像进行非线性变换,完成灰度级向高灰度级或高灰度级向低灰度级的映射,其形式为:p
′
=cp
α
;式中,p为当前图像的输入灰度级,p
′
为当前图像的输出灰度级,c为灰度级缩放比例,α是灰度级非线性变换因子,对于不同光照场景下的g
k
,选取不同的c与α,提取出完整车道线,建立g
k
与参数c以及α的映射f(g
k
)
→
c,α,完成光照适应性训练。4.根据权利要求3所述的一种基于感兴趣区域的车道线自动提取方法,其特征在于,所述进光量控制的过程包括:对图像进行感兴趣区域提取,并计算直方图分布g
k
,利用已训练完成的映射关系f(g
k
)
→
c,α,选取适合当前光照场景下的c与α参数,完成进光量的自适应控制。5.根据权利要求3或4所述的一种基于感兴趣区域的车道线自动提取方法,其特征在于,所述异物检测与处理的过程包括:选取(0,h/2)到(w,h)的图像区域作为感兴趣区域,并将该区域以外的像素直接作为背景;在感兴趣区域的rgb颜色空间中,分别以具有k个高斯分量的全协方差混合高斯模型对异物和背景进行建模,建立能量函数:e(β,i,δ,z)=q(β,i,δ,z) r(β,z)
ꢀꢀꢀꢀ
(1)其中,β为像素不透明度,β为0则代表当前像素为背景,β为1则代表当前像素属于异物;δ代表异物与背景的灰度直方图,z为图像灰度值数组,z=(z1,
…
,z
n
,
…
,z
n
);q(β,i,p,z)为区域项,表示一个像素被分类为异物或背景的惩罚,定义为:
式中,d(β
n
,i
n
,p,z
n
)为混合高斯密度模型,其形式为:d(β
n
,i
n
,δ,z
n
)=-logπ(β
n
,i
n
)-log p(z
n
|β
n
)
ꢀꢀꢀꢀ
(3)式中,p(z
n
|β
n
)为高斯概率分布π(β
n
,i
n
)是混合权重系数,满足:经推导得出混合高斯密度模型表达式为:其中,混合高斯模型的参数分别为:每个高斯分量的权重π,每个高斯分量的均值向量μ以及协方差矩阵;表达式为:δ={π(β
n
,i
n
),μ(β
n
,i
n
),∑(β
n
,i
n
),i=1,2,
…
,k}
ꢀꢀꢀꢀ
(6)r(β,z)为输入图像的边界项,代表邻域像素不连续的惩罚,其表达式为:式中,参数τ为比例缩放因子,由当前图像的对比度决定;(m,n)∈c,c为相邻颜色对的集合,γ为一个常量值50;若邻域内的两像素β
m
与β
n
二范数较小则两像素属于同属于异物或同属于背景的概率较大,若两像素二范数较大,则有较小的概率使这两个像素同属于异物或背景;当图像对比度较低时,两像素的二范数||z
m-z
n
||较小,使用比例缩放因子τ对像素间的二范数进行放大;将每个像素分为异物或背景,将像素n的rgb代入混合高斯模型的的每个分量中,像素n可能属于概率最大的高斯分量i
n
;由下式进行求取:i
n
=arg min d(β
n
,i
n
,δ,z
n
)
ꢀꢀꢀꢀ
(8)再通过rgb值估计混合高斯模型的参数均值以及协方差,通过属于该高斯分量的像素数与像素总数的比值确定该像素的高斯分量权重δ:δ=arg min q(β,i,δ,z)
ꢀꢀꢀꢀ
(9)建立每个像素与异物和背景的连接图,分别求取连接异物以及背景的各边的权重,用最小能量完成边的分割:min min e(β,i,δ,z)
ꢀꢀꢀꢀ
(10)对公式(10)-(12)进行循环运算,直到能量函数收敛则停止迭代,最终得到异物的像素以及属于背景的像素;将属于异物的像素置零,得到去除异物后的车道线感兴趣区域。6.根据权利要求5所述的一种基于感兴趣区域的车道线自动提取方法,其特征在于,所述车道线提取的过程包括:对去除异物后的车道线感兴趣区域进行灰度化读取,对当前图像中的像素点{m1,m2,
…
,m
n
}按照灰度相似度进行二分类,n=w
×
h代表像素总数;随机设定两类像素点的质心λ0,λ1,计算各个像素与质心的二范数||m
n-λ
k
||,其中,n∈[0,n/2],k∈{0,1}.然后,选取:
作为像素分类的损失函数,通过迭代,求解合适的聚类中心将图像中的像素分为两类;其中:y
nk
代表当前像素是否属于该类,若距离某类质心的欧氏距离最小则取值为1,否则取值为0,代表此像素不属于该类;设置迭代终止条件,使损失函数收敛,满足终止条件后停止迭代,车道线与非车道线的像素得到区分,完成车道线得到自适应提取。7.根据权利要求2所述的一种基于感兴趣区域的车道线自动提取方法,其特征在于,设置视觉传感器获取的图像尺寸为640*480,灰度级范围[0,7]。8.一种基于感兴趣区域的车道线自动提取系统,其特征在于,包括:进光量控制模块:用于采集图像,并根据图像的光照场景和预先进行光照适用性训练得到的映射关系调整调节参数;异物检测与处理模块:用于从图像中选取感兴趣区域,建立能量函数并进行循环迭代,求解得到异物的像素结合,将属于异物的像素置零,得到去除异物后的感兴趣区域;车道线提取模块:用于对去除异物后的感兴趣区域进行灰度化读取,按照灰度相似度进行二分类,设置损失函数收敛和终止条件,满足终止条件后停止迭代,完成车道线与非车道线的像素区分,最终提取出车道线。
技术总结
本发明公开了一种基于感兴趣区域的车道线自动提取方法及系统,包括:进光量控制:采集图像,根据图像的光照场景和预先进行光照适用性训练得到的映射关系调整调节参数;异物检测与处理:从图像中选取感兴趣区域,建立能量函数并进行循环迭代,求解得到异物的像素结合,将属于异物的像素置零,得到去除异物后的感兴趣区域;车道线提取:对去除异物后的感兴趣区域进行灰度化读取,按照灰度相似度进行二分类,设置损失函数收敛和终止条件,满足终止条件后停止迭代,完成车道线与非车道线的像素区分,最终提取出车道线。本发明通过进光量控制并对车道线区域内的异物进行检测将对应像素清除,兼具了识别反应速度快和识别结果准确的效果。效果。效果。
技术研发人员:葛鹏 杜辉 李东 孔郁偲
受保护的技术使用者:随机数(浙江)智能科技有限公司
技术研发日:2021.11.02
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。