技术特征:
1.一种基于粒子滤波的无人车动态避障方法,其特征在于:所述的无人车设置有总控制系统,以及分别与总控制系统连接的运动控制系统、惯性导航系统、激光雷达模块和imu模块;所述的总控制系统中加载有地图和无人车操作系统ros控制软件;所述的无人车通过imu模块判断出无人车的速度与位置,通过激光雷达扫描无人车的周围环境,将扫描得到的图片与地图信息进行对比,先去除地图上已知的障碍物;再对剩余障碍物采用粒子滤波的方式进行采样,预测障碍物相对无人车的运动速度及运动趋势;采用dwa算法结合障碍物粒子滤波的方式,避开移动障碍物;当无人车距离移动障碍物达到安全距离后,继续沿着全局最优路径进行移动。2.根据权利要求1所述的一种基于粒子滤波的无人车动态避障方法,其特征在于:所述的无人车对剩余障碍物采用粒子滤波的方式进行采样,是由激光雷达向无人车四周进行扫描,识别出与地图上不同的障碍物,经过初始化、计算权重、重采样、状态转移的步骤后,粒子慢慢聚在了移动障碍物的真实位置,集中对不同于地图上的障碍物进行撒点,当障碍物偏离撒点的中心位置时,调整撒点的范围,并据此预测下一次撒点的位置,求取障碍物的位置公式如下:置公式如下:置公式如下:式中为第k秒激光雷达的旋转角,为第k秒无人车到障碍物距离,为障碍物所在平均旋转角,为障碍物初始旋转角,为障碍物终止旋转角,k为障碍物对激光雷达角度占比,为无人车初始旋转角,为无人车终止旋转角;通过对比k值的大小来确定散点调整的方向及幅度。3.根据权利要求2所述的一种基于粒子滤波的无人车动态避障方法,其特征在于:所述的初始化、计算权重、重采样、状态转移的具体操作步骤如下所示:s1.初始化后,由激光雷达向无人车四周撒点,随机分布,粒子代表假设的位置,完成初始化,撒点得到的结果与系统中加载的地图做对比后锁定新出现的障碍物;将激光雷达集中向新出现的障碍物集中撒点,产生定量的位置假设,在空间里记录粒子滤波估算障碍物的位置;s2.计算权重:产生定量的粒子假设,根据无人车所处的位置和到障碍物的距离,记录粒子的可能性,对所有的粒子都进行相同的评估,对于可能性大的粒子附一个较大的权重,较小可能性的粒子附较小的权重;s3.重采样:当障碍物偏离撒点的中心位置时,调整撒点的范围,抛弃旧粒子,生成新粒子,生成的新粒子集中出现在权重大的旧粒子位置上,并且有大量的新粒子叠加在同一个位置;s4.状态转移:无人车和障碍物继续前进,粒子也依据运动模型一起移动,根据传感器知道无人车的方向和速度范围。
4.根据权利要求2所述的一种基于粒子滤波的无人车动态避障方法,其特征在于:通过集中对不同于地图上的障碍物进行撒点,可以判断该障碍物是否为动态障碍物,若不是动态障碍物则直接避让,若为动态障碍物则一并计算出动态障碍物的移动速度,并根据撒点的调整来预测障碍物的运动趋势;移动障碍物的速度求解公式如下:解公式如下:式中l
t
为当前时刻障碍物到无人车的距离,分别为当前时刻前1秒、2秒、3秒、4秒、5秒激光雷达所在角度,秒、2秒、3秒、4秒、5秒激光雷达所在角度,分别为当前时刻前1秒、2秒、3秒、4秒、5秒无人车到障碍物的距离,v为当前障碍物移动速度,l
t-1
为当前时刻前t秒时刻障碍物到无人车的距离。5.根据权利要求1所述的一种基于粒子滤波的无人车动态避障方法,其特征在于:通过所述的对剩余障碍物采用粒子滤波的方式进行采样,预测障碍物相对无人车的运动速度及运动趋势,从而能确定无人车的运动方向,求解无人车运动方向的公式如下:g(υ,ω)=σ(α
·
h(υ,ω) β
·
d(υ,ω) γ
·
v(υ,ω))h(υ,ω)为方位角评价函数,d(υ,ω)为无人车与最近障碍物之间的距离,v(υ,ω)为轨迹对应的速度大小;对每一项除以每一项的总和,算出各自在自己类别上面的占比,然后相加,进行归一化,算出它们各自在自己类别上的得分占比,然后相加,使小车避开障碍物,朝着目标,以设定的速度进行行驶。6.根据权利要求5所述的一种基于粒子滤波的无人车动态避障方法,其特征在于:所述的确定无人车的运动方向和速度的情况下,从而能得到无人车的自身位置以及运行速度;根据无人车的自身位置以及运行速度,以粒子滤波的方式对障碍物进行采样,在发现粒子的平均分数突然降低了的时候,在全局再重新的撒一些粒子,通过imu模块测量的概率来评估增加粒子,即:p(z
t
|z
1:t-1
,u
1:t
,m)并将其与平均测量概率联系起来,在粒子滤波中这个数量的近似容易根据重要性因子获取,因为重要性权重是这个概率的随机估计,其平均值为式:p为在某个位姿下,能够产生实际测量z
t
的概率,z
1:t-1
为传感器测量距离,u
1:t
为运动信息,m为1~m间的数,无具体意义,ω为测量概率。7.根据权利要求1所述的一种基于粒子滤波的无人车动态避障方法,其特征在于:所述的运动控制系统中设置有无人车的运动模型,无人车可以前进和旋转,将相邻两点之间的运动轨迹看成直线,无人车走的距离:δs=v*δt;上式中,δs为无人车δt时间内移动的距离,v为无人车的移动速度,δt为很小一段时间,无具体意义;
变换成无人车的x,y坐标:δx=vδt sinθ:δy=υδt sinθ:上公式中,δx为δt内无人车相对于x轴的位移,δy为δt内无人车相对于y轴的位移;无人车下个状态的位置:x=x
′
υδt cosθ;y=y
′
υδt sinθ;θ=θ ωδt;上列公式中,x’为上一时刻无人车位置横坐标,y’为上一时刻无人车位置纵坐标,θ为无人车总体移动方向,ω为δt时刻无人车移动角度。8.根据权利要求1所述的一种基于粒子滤波的无人车动态避障方法,其特征在于:所述的总控制系统基于stm32控制器,stm32控制器通过总线与树莓派平台连接,树莓派平台通过wi-fi无线网与上位机进行通讯,完成数据回传。9.根据权利要求1所述的一种基于粒子滤波的无人车动态避障方法,其特征在于:所述的惯性导航设备包括里程计和陀螺仪,里程计、陀螺仪和激光雷达测距装置通过信号线与总控制系统连接,向总控制系统提供无人车自身定位的原始数据。
技术总结
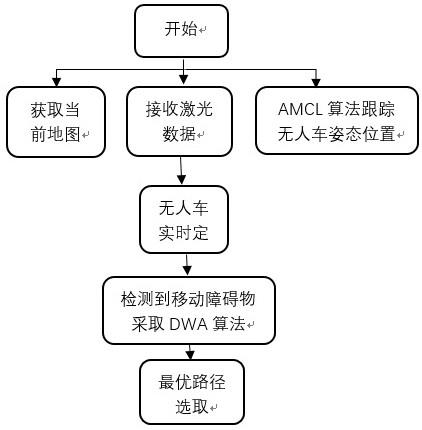
本发明公开了一种基于粒子滤波的无人车动态避障方法,所述的无人车设置有总控制系统,以及分别与总控制系统连接的运动控制系统、惯性导航系统、激光雷达模块和IMU模块;所述的总控制系统中加载有地图和无人车操作系统ROS控制软件;所述的无人车通过IMU模块判断出无人车的速度与位置,通过激光雷达扫描无人车的周围环境,将扫描得到的图片与地图信息进行对比,先去除地图上已知的障碍物;再对剩余障碍物采用粒子滤波的方式进行采样,预测障碍物相对无人车的运动速度及运动趋势;采用DWA算法结合障碍物粒子滤波的方式,避开移动障碍物;当无人车距离移动障碍物达到安全距离后,继续沿着全局最优路径进行移动。继续沿着全局最优路径进行移动。继续沿着全局最优路径进行移动。
技术研发人员:魏晓倩 赵志国 毛康康 王瑞 万小康 庞敏
受保护的技术使用者:淮阴工学院
技术研发日:2021.11.26
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。