1.本发明涉及排泄物收集技术领域,具体涉及一种牲畜粪便自动收集机器人。
背景技术:
2.对于牲畜养殖来说,及时、有效地清除畜舍内的粪污,保持畜舍环境卫生,对于牲畜的养殖尤为重要,人工清粪虽然只需用一些清扫工具,工人清粪车等,设备简单,一次性投资少,但是劳动量大,生产率低,对于大规模养殖户来说,需要大量的人力,成本加大,为了适应市场需求,减少粪便清理过程中的劳动力投入,提高养殖场自动化管理水平,提高牲畜粪便的综合利用率,需要机械清粪便,目前市场上的清粪车还需要人工协助,运行费用较高。
技术实现要素:
3.针对上述情况,本发明的目的是提供一种牲畜粪便自动收集机器人,可以用于集约化养殖场牲畜粪便的自动收集,节约劳动力,提高工作效率,实现了自动化粪便收集。
4.本发明的技术方案如下:一种牲畜粪便自动收集机器人,包括储粪箱、左前轮胎、右前轮胎、左后轮胎和右后轮胎,所述储粪箱的底部一体连接有智能车体,所述智能车体的底部分别固定左前轮固定板、左后轮固定板、右前轮固定板、右后轮固定板,左前轮胎动力连接左前电机,右前轮胎动力连接右前电机,左后轮胎动力连接左后电机,右后轮胎动力连接右后电机,左前轮胎和右前轮胎之间连接有前轮连杆,左后轮胎和右后轮胎之间连接有后轮连杆,电机输出轴承分别对应固定在左前轮固定板、左后轮固定板、右前轮固定板、右后轮固定板,智能车体底部的中部固定有转向电机,所述转向电机的输出轴连接转向动力臂,所述转向动力臂分别铰接前转向拉杆和后转向拉杆的一端,所述前转向拉杆的另一端铰接左前轮固定板,后转向拉杆的另一端铰接左后轮固定板,智能车体的后部设置有电源开关和充电接口,前部设置有测距传感器,所述储粪箱的前端上部通过铲粪板连轴连接铲粪板的后端,铲粪板的底部连接推拉杆的一端,推拉杆的另一端固定在储粪箱前端的下部,所述铲粪板的上端面固定有在铲粪板铲粪时与地面平行的连杆,所述连杆的前端活动连接有前挡板,所述储粪箱后端底部活动连接有卸粪板,所述智能车体信号连接有遥控器,所述遥控器上设有显示屏和按键。
5.所述智能车体内部设置有电源处理模块、超声波测距模块、电机驱动模块、主控电路模块、通信模块、转向模块、粪便收集模块;所述主控电路模块包括主控芯片u1,所述主控芯片u1为芯片iap15w4k61s4,主控芯片u1的引脚p30/rxd、p31/txd连接对外接口j1的引脚rxd、txd。
6.所述电源处理模块包括电源开关s1、电源处理芯片u2、滤波电感l1、高精度稳压器u3、滤波电容c2、c3,所述芯片u2为芯片34063,所述芯片u2的引脚6分为两路,一路连接二极管d3的负极,另一路通过电阻r28连接电源处理芯片u2的引脚1,二极管d3的正极通过电源开关s1连接供电电源bt1的正极端向电源处理模块供电,引脚7和8连接引脚1,电容c3、c2的
正极端分别连接在二极管d3的两侧,负极端接地,电源处理芯片u2的引脚4接地,引脚3通过电容c4接地,引脚2连接滤波电感l1的一端,滤波电感l1的另一端连接高精度稳压器u3的电压输入端,二极管d4反接在引脚2和接地端,串接的电阻r29、r30与电容c5、c6并接,连接在滤波电感l1的另一端,引脚5连接在电阻r29和电阻r30之间,高精度稳压器u3的输出端为整机提供5v电源,电容c7并接在高精度稳压器u3的输出端和接地端。
7.所述超声波测距模块包括超声波测距模块m1和m2,超声波测距模块m1的引脚txd、rxd连接主控芯片u1的引脚p02/rxd4、p03/txd4,超声波测距模块m2的引脚txd、rxd连接主控芯片u1的引脚p00/rxd4、p01/txd4。
8.所述电机驱动模块包括驱动模块m3、m4、m5和m6,其中m3为左前电机驱动模块,m4为右前电机驱动模块,m5为左后电机驱动模块,m6为右后电机驱动模块,m3的引脚in1和in2分别连接主控芯片u1的引脚p47和p11,引脚pwm连接主控芯片u1的引脚p27/pwm2_2,引脚m 和m-分别连接左前电机e1的正负端,电源引脚经开关和接地引脚分别连接供电电源bt1的正负极,m4的引脚in1和in2分别连接主控芯片u1的引脚p07和p06,引脚pwm连接主控芯片u1的引脚p23/pwm5,引脚m 和m-分别连接右前电机e2的正负端,电源引脚经开关和接地引脚分别连接供电电源bt1的正负极;m5的引脚in1和in2分别连接主控芯片u1的引脚p14和p13,引脚pwm连接主控芯片u1的引脚p22/pwm4,引脚m 和m-分别连接左前电机e3的正负端,电源引脚经开关和接地引脚分别连接供电电源bt1的正负极;m6的引脚in1和in2分别连接主控芯片u1的引脚p15和p16,引脚pwm连接主控芯片u1的引脚p21/pwm3,引脚m 和m-分别连接右后电机e4的正负端,电源引脚经开关和接地引脚分别连接供电电源bt1的正负极。
9.所述通信模块包括无线通讯芯片m7,无线通讯芯片m7的引脚en连接主控芯片u1的引脚p42,引脚rxd、txd分别与主控芯片u1的引脚p37/txd_2、p36/rxd_2连接,引脚set与主控芯片u1的引脚p35连接。
10.所述转向模块包括转向电机e5、转向电机控制m8和角度传感器r28,所述转向电机控制m8的输出端口out 、out-分别连接转向电机e5的正负极,端口sin连接角度传感器r28的信号端,端口5v电源和gnd分别连接角度传感器的两端为角度传感器提供电源,端口pwm连接主控芯片u1的引脚p17,端口dc24v连接dc24v电源,端口gnd接地。
11.所述粪便收集模块包括电机驱动模块m9、粪便收集控制电机e6,电机驱动模块m9的输出控制端口in1、in2连接主控芯片u1的引脚p20、p44,端口m 、m-分别连接粪便收集控制电机e6的正负极。
12.所述遥控器包括核心控制模块、电源处理模块、通信模块、按键模块、存储模块、显示模块;所述核心控制模块包括芯片u1,所述芯片u1为芯片iap15w413as;所述电源处理模块包括芯片u6,电阻r1、r2、r5、r6,电容c1、c2、c3、c4、c5,滤波电感l1,所述芯片u6为芯片34063,芯片u6的引脚6通过电阻r3和电源开关s1连接供电电源bt1的正极端,引脚4连接供电电源bt1负极,电阻r1与r2串接后并接在供电电源bt1两端,电容c1与电阻r2并接,电阻r1和r2之间的电压采集点连接芯片u1的引脚p10,芯片u6的引脚7、8通过电阻r4与引脚6连接,引脚3通过电容c3与供电电源bt1负极连接,引脚2连接电感l1的一端,二极管d6反接在引脚2与供电电源的负极之间,电容c4、c5依次与串接的电阻r5、r6并接,芯片u4的引脚5连接在电阻r5和r6之间。
13.所述通信模块包括无线通讯模块m1,m1的引脚vcc、gnd分别连接电源的正负极,引脚en连接到所述芯片u1的引脚p32,引脚rxd、txd分别连接芯片u1的引脚p31、p30,引脚set连接芯片u1的引脚p11。
14.所述按键模块包括按键k1-k8,所述按键k1-k8通过四行二列6根线采集信号分别连接到芯片u1的引脚p12-p17。
15.所述存储模块包括存储芯片u2,所述芯片u2为芯片fm24c04,芯片u2的引脚1、2、3、4、7与地线连接,引脚8为芯片供电脚,引脚5、6与芯片u1的引脚p54、p55连接。
16.所述显示模块包括液晶屏lcd1和芯片u3,所述芯片u3为液晶屏驱动专用芯片ht1621,引脚como0
‑ꢀ
como3与液晶屏lcd1的段码连接,引脚seg0-seg7与液晶屏lcd1的位码连接,引脚vdd连接电源vcc,引脚/cs连接芯片u1的引脚p36,引脚/rd连接芯片u1的引脚p35,引脚/wr连接芯片u1的引脚p34,引脚data连接芯片u1的引脚p33。
17.优选的,所述卸粪板上安装有把手,方便打开卸粪。
18.优选的,所述推拉杆为电动液压杆,方便控制。
19.优选的,所述智能车体内部主控模块中的主控芯片u1的引脚p23/pwm5、p22/pwm4、p21/pwm3、p42、p37/txd_2、p36/rxd_2、p35分别通过上拉电阻r18、r19、r20、r24、r22、r23、r21连接电源vcc,保证引脚工作的稳定性。
20.优选的,所述遥控器的核心控制模块中的芯片u1的引脚p30-p32分别连接有上拉电阻r14-r16,保证引脚工作的稳定性。
21.优选的,所述遥控器的核心控制模块中的芯片u1的引脚p37、p12-p17分别连接上拉电阻r13-r7,保证引脚工作的稳定性。
22.优选的,所述遥控器的按键k1-k8分别为加速/前进按键,后退/减速按键,左转按键,右转按键,自动按键,手动按键,装粪按键,收粪按键。
23.本发明的牲畜粪便自动收集机器人,可以对牲畜养殖场的粪便进行自动收集,通过遥控器进行智能控制卸粪、装粪,控制车的启停,转向,前进/后退,加速/减速,实现粪便的自动化收集,提高工作效率。
24.本发明的牲畜粪便自动收集机器人,使用方便,人工可远程进行操控,所需人员大大减少,降低企业的成本,提高企业的自动化管理水平。
附图说明
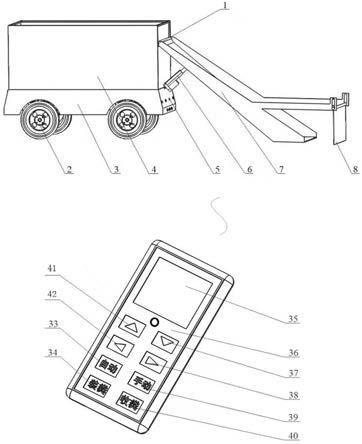
25.图1为本发明牲畜粪便自动收集机器人结构示意图;图2为本发明牲畜粪便自动收集机器人铲粪板抬起结构示意图;图3为本发明牲畜粪便自动收集机器人铲粪板工作状态结构示意图;图4为本发明牲畜粪便自动收集机器人卸粪板打开结构示意图;图5为本发明牲畜粪便自动收集机器人智能车体底部结构示意图;图6为本发明牲畜粪便自动收集机器人智能车体内部电路原理图;图7为本发明牲畜粪便自动收集机器人遥控器电路原理图。
26.图中:1、铲粪板连轴;2、轮胎;3、智能车;4、储粪箱;5、测距传感器;6、推拉杆;7、铲粪板;8、前挡板;9、卸粪板;10、充电口;11、开关按钮;12、右后轮固定板;13、右后轮胎;14、右后电机;15、电源开关;16、充电接口;17、后轮连杆;18、左后电机;19、左后轮胎;20、左后
轮固定板;21、转向电机;22、后转向拉杆;23、转向动力臂;24、左前轮胎;25、前转向拉杆;26、左前电机;27、左前轮固定板;28、前轮拉杆;29、右前电机;30、右前轮胎;31、右前轮固定板;32、连杆;33、自动;34、装粪;35、液晶屏;36、遥控器;37、后退/减速;38、右转;39、手动;40、卸粪;41、前进/加速;42、左转。
具体实施方式
27.下面结合附图,对本发明的技术方案进行进一步详细的描述:如图1-5所示,一种牲畜粪便自动收集机器人,包括储粪箱4、左前轮胎24、右前轮胎30、左后轮胎19和右后轮胎13,所述储粪箱4的底部一体连接有智能车体3,所述智能车体3的底部分别固定左前轮固定板27、左后轮固定板20、右前轮固定板31、右后轮固定板12,左前轮胎24动力连接左前电机26,右前轮胎30动力连接右前电机29,左后轮胎19动力连接左后电机18,右后轮胎13动力连接右后电机14,左前轮胎24和右前轮胎30之间连接有前轮连杆28,左后轮胎19和右后轮胎13之间连接有后轮连杆17,电机输出轴承分别对应固定在左前轮固定板27、左后轮固定板20、右前轮固定板31、右后轮固定板12,智能车体3底部的中部固定有转向电机21,所述转向电机21的输出轴连接转向动力臂23,所述转向动力臂23分别铰接前转向拉杆25和后转向拉杆22的一端,所述前转向拉杆25的另一端铰接左前轮固定板27,后转向拉杆22的另一端铰接左后轮固定板20,智能车体3的后部设置有电源开关15和充电接口16,前部设置有测距传感器5,所述储粪箱4的前端上部通过铲粪板连轴1连接铲粪板7的后端,铲粪板7的底部连接推拉杆6的一端,推拉杆6的另一端固定在储粪箱4前端的下部,所述铲粪板7的上端面固定有在铲粪板7铲粪时与地面平行的连杆32,所述连杆32的前端活动连接有前挡板8,所述储粪箱4后端底部活动连接有卸粪板9,所述智能车体3信号连接有遥控器,所述遥控器36上设有液晶屏35和按键。
28.如图6所示,所述智能车体内部设置有电源处理模块、超声波测距模块、电机驱动模块、主控电路模块、通信模块、转向模块、粪便收集模块;所述主控电路模块包括主控芯片u1,所述主控芯片u1为芯片iap15w4k61s4,主控芯片u1的引脚p30/rxd、p31/txd连接对外接口j1的引脚rxd、txd。
29.所述主控芯片u1的串口rxd3、txd3连接到前障碍物检测的超声波模块,用来读取前端障碍物的距离。u1的串口rxd4、txd4连接到前障碍物检测的超声波模块,用来读取后端障碍物的距离。芯片u1的pwm2、pwm3、pwm4、pwm5分别连接到四个电机驱动模块,用来为电机驱动模块提供pwm信号。rxd、txd连接到对外接口j1,用来为单片机灌入程序,p37/txd_2、p36/rxd_2与无线通讯模块连接,用于与外部的遥控进行通信,主控芯片u1的引脚p23/pwm5、p22/pwm4、p21/pwm3、p42、p37/txd_2、p36/rxd_2、p35分别通过上拉电阻r18、r19、r20、r24、r22、r23、r21连接电源vcc,保证引脚工作的稳定性。
30.所述电源处理模块包括电源开关s1、电源处理芯片u2、滤波电感l1、高精度稳压器u3、滤波电容c2、c3,所述芯片u2为芯片34063,所述芯片u2的引脚6分为两路,一路连接二极管d3的负极,另一路通过电阻r28连接电源处理芯片u2的引脚1,二极管d3的正极通过电源开关s1连接供电电源bt1的正极端向电源处理模块供电,引脚7和8连接引脚1,电容c3、c2的正极端分别连接在二极管d3的两侧,负极端接地,电源处理芯片u2的引脚4接地,引脚3通过电容c4接地,引脚2连接滤波电感l1的一端,滤波电感l1的另一端连接高精度稳压器u3的电
压输入端,二极管d4反接在引脚2和接地端,串接的电阻r29、r30与电容c5、c6并接,连接在滤波电感l1的另一端,引脚5连接在电阻r29和电阻r30之间,高精度稳压器u3的输出端为整机提供5v电源,电容c7并接在高精度稳压器u3的输出端和接地端。
31.电源处理模块用来将外部供给的dc24v电压转换成本控制电路所需要的电压,首先设备供电端提供的12v电压经过开关s1之后,再由电阻r27限流,电容c2滤波之后,再经过防反接二极管d3之后,再由滤波电容c3进行低频滤波之后,得到一个比较稳定的24v电源,供给电源处理芯片u2。电阻r28是过载保护取样电阻,在输出负载电流过大时,电源处理芯片u2便会切断整机电源。电容c4是芯片的工作频率设置电容,用来设置电源处理芯片u2的工作频率。电源处理芯片u2正常工作后,由引脚2输出电流,d4是本电源的续流二极管,用来保障在滤波电感l1端流过比较稳定的电流。l1是一个滤波电感,将输出电压送到滤波电容c5和c6的正极端,滤波之后,输出6.8v的电压,电阻r29和r30是分压取样电阻,将取样之后的电压送回到电源处理芯片u2的电压采集引脚,用来保障输出电压的稳定性。6.8v的电压又送到高精度稳压器u3的的输入端,由输出端输出高精度的5v电压,c7是滤波电容,为整机提供稳定的电源。
32.所述超声波测距模块包括超声波测距模块m1和m2,超声波测距模块m1的引脚txd、rxd连接主控芯片u1的引脚p02/rxd4、p03/txd4,超声波测距模块m2的引脚txd、rxd连接主控芯片u1的引脚p00/rxd4、p01/txd4。
33.所述超声波测距模块中的m1用来检测车行走的前方是否有障碍物,如果有障碍物,车就会停下来,等待处理或者识别粪便进行清理。m2用来检测车行走的后方是否有障碍物,如果有障碍物,车就会停下来,等待处理或者识别粪便进行清理。模块m1和m2均为串口通讯。
34.所述电机驱动模块包括驱动模块m3、m4、m5和m6,其中m3为左前电机驱动模块,m4为右前电机驱动模块,m5为左后电机驱动模块,m6为右后电机驱动模块,m3的引脚in1和in2分别连接主控芯片u1的引脚p47和p11,引脚pwm连接主控芯片u1的引脚p27/pwm2_2,引脚m 和m-分别连接左前电机e1的正负端,电源引脚经开关和接地引脚分别连接供电电源bt1的正负极,m4的引脚in1和in2分别连接主控芯片u1的引脚p07和p06,引脚pwm连接主控芯片u1的引脚p23/pwm5,引脚m 和m-分别连接右前电机e2的正负端,电源引脚经开关和接地引脚分别连接供电电源bt1的正负极;m5的引脚in1和in2分别连接主控芯片u1的引脚p14和p13,引脚pwm连接主控芯片u1的引脚p22/pwm4,引脚m 和m-分别连接左前电机e3的正负端,电源引脚经开关和接地引脚分别连接供电电源bt1的正负极;m6的引脚in1和in2分别连接主控芯片u1的引脚p15和p16,引脚pwm连接主控芯片u1的引脚p21/pwm3,引脚m 和m-分别连接右后电机e4的正负端,电源引脚经开关和接地引脚分别连接供电电源bt1的正负极。
35.所述电机驱动模块的驱动模块m3、m4、m5、m6直接驱动四个电机e1、e2、e3、e4,用来给车提供动力。其中pwm是模块的控制端,用来控制电机的转速。in2用来控制电机的运转方向。in1用来控制电机驱动模块的输出,此引脚低电平动力给出输出,高电平动力停止输出。
36.所述通信模块包括无线通讯芯片m1,无线通讯芯片m1的引脚en连接主控芯片u1的引脚p42,引脚rxd、txd分别与主控芯片u1的引脚p37/txd_2、p36/rxd_2连接,引脚set与主控芯片u1的引脚p35连接。
37.所述通信模块的无线通讯芯片m7具有7个引脚,其中vcc、gnd为本模块的供电端。
en为本模块的片选端,在不通信的时候可以利用单片机的口线把这个一脚抬高,可以使本模块进入休眠模式,以便节省电量。在通信时,由主控芯片u 1口线把这只引脚拉低。en引脚直接连接到主控芯片u1的端口p42,并连接了一只上拉电阻r24用于保证口线的稳定性。无线通讯芯片m7的引脚rxd为数据输入口,txd为数据输出口,无线通讯芯片m7的引脚ale为通讯状态指示灯的输出端,本电路没有使用。无线通讯芯片m7的引脚set为设置端口。
38.所述转向模块包括转向电机e5、转向电机控制器m8和角度传感器r28,所述转向电机控制m8的输出端口out 、out-分别连接转向电机e5的正负极,端口sin连接角度传感器r28的信号端,端口5v电源和gnd分别连接角度传感器的两端为角度传感器提供电源,端口pwm连接主控芯片u1的引脚p17,端口dc24v连接dc24v电源,端口gnd接地。
39.所述转向模块是用来控制车轮转弯角度的,主控芯片u1的引脚p17是pwm信号输出,高电平为0.5~2.5ms,对应转向角度为向左-30~30度,dc24v是转向电机控制器m8的供电端,gnd是电源的负极端。需要转向时,首先由主控芯片u1提供需要的角度对应的pwm信号,转向电机控制器m8收到信号后,便控制转向电机e5转动,转向电机e5与角度传感器r28同轴,角度传感器r28又将当前角度通过信号发送到转向电机控制器m8的sin端,通过检查获得当前的转向角度,当达到所需角度时,转向电机e5就会停止旋转。
40.所述粪便收集模块包括电机驱动模块m9、粪便收集控制电机e6,电机驱动模块m9的输出控制端口in1、in2连接主控芯片u1的引脚p20、p44,端口m 、m-分别连接粪便收集控制电机e6的正负极。
41.所述粪便收集模块当需要抬起铲粪板时,主控芯片u1的引脚p20、p44分别给出高电平和低电平,当需要放下铲粪板时,主控芯片u1的引脚p20、p44分别给出低电平和高电平,当需要立即停止输出时,主控芯片u1的引脚p20、p44全部给出低电平。
42.所述遥控器包括核心控制模块、电源处理模块、通信模块、按键模块、存储模块、显示模块;所述核心控制模块包括芯片u1,所述芯片u1为芯片iap15w413as;其功能是采集电压信号、按键信号、通讯信号、读写存储器、控制液晶屏显示,芯片u1的引脚p30-p32分别连接有上拉电阻r14-r16,引脚p37、p12-p17分别连接上拉电阻r13-r7,保证引脚工作的稳定性。
43.所述电源处理模块包括芯片u6,电阻r1、r2、r5、r6,电容c1、c2、c3、c4、c5,滤波电感l1,所述芯片u6为芯片34063,芯片u6的引脚6通过电阻r3和电源开关s1连接供电电源bt1的正极端,引脚4连接供电电源bt1负极,电阻r1与r2串接后并接在供电电源bt1两端,电容c1与电阻r2并接,电阻r1和r2之间的电压采集点连接芯片u1的引脚p10,芯片u6的引脚7、8通过电阻r4与引脚6连接,引脚3通过电容c3与供电电源bt1负极连接,引脚2连接电感l1的一端,二极管d6反接在引脚2与供电电源的负极之间,电容c4、c5依次与串接的电阻r5、r6并接,芯片u4的引脚5连接在电阻r5和r6之间。
44.所述电源处理电路是用来将电池bt1供给的dc7.4v电压转换成本控制电路所需要的电压。首先设备供电端提供的7.4v电压经过电阻r3限流之后,再进行低频滤波之后,得到一个比较稳定的7v左右的电源,供给芯片u6。电阻r4是过载保护取样电阻,在输出负载电流过大时,芯片u6便会切断整机电源。电容c3是芯片u6的工作频率设置电容。用来设置芯片u6的工作频率。芯片u6正常工作后,由芯片u6的引脚2输出电流,二极管d6是本电源的续流二
极管,用来保障在电感l1端流过比较稳定的电流。l1是一个滤波电感,将输出电压送到电容c4和c5的正极端,滤波之后,为整机提供稳定的3.3v电压。电阻r5和r6是分压取样电阻,将取样之后的电压送回到芯片u6的电压采集引脚5,用来保障输出电压的稳定性。电阻r1、r2是电源电压的采集端,电源电压首先经过电阻r1、r2分压之后,将采集电压送到主控芯片u1的a/d输入端p10,然后经过主控芯片u1进行运算,然后将遥控器36剩余的电量显示在液晶屏35上。
45.所述通信模块包括无线通讯模块m1,m1的引脚vcc、gnd分别连接dc24v电源的正负极,引脚en连接到所述芯片u1的引脚p32,引脚rxd、txd分别连接芯片u1的引脚p31、p30,引脚set连接芯片u1的引脚p11。
46.所述通信模块的无线通讯模块m1具有7个引脚,其中vcc、gnd为本模块的供电端,en为片选端,在不通信的时候可以利用主控芯片u1把这个一脚抬高,可以使模块进入休眠模式,以便节省电量。在通信时,由主控芯片u1口线把这只引脚拉低。无线通讯模块m1的rxd为数据输入口,txd为数据输出口,ale为通讯状态指示灯的输出端,本电路没有使用。set为设置端口。
47.所述按键模块包括按键k1-k8,所述按键k1-k8通过四行二列6根线采集信号连接至分别连接到芯片u1的引脚p12-p17。
48.所述按键模块的按键k1、k2为加速/前进按键,后退/减速,按键k3为左转按键,k4是车的右转,正数为前进,负数为后退,k5、k6是车的自动和手动按键,可以控制车的运行方式,当手动状态下,可以通过按键k1、k2控制前走、后退,长时间按下按键k1、k2,就会加快前进或者后退的速度。在自动状态下,智能车会自动巡视周边是否有牲畜粪便,找到目标后,车会朝着目标行驶,然后完成收集、装车的整个过程。
49.所述存储模块包括存储芯片u2,所述芯片u2为芯片fm24c04,芯片u2的引脚1、2、3、4、7与地线连接,引脚8为芯片供电脚,引脚5、6与芯片u1的引脚p54、p55连接。
50.所述数据存储电路是用来存储设置的数据,引脚5、6与芯片u1的p54、p55连接用于数据传输。
51.所述显示模块包括液晶屏lcd1和芯片u3,所述芯片u3为液晶屏驱动专用芯片ht1621,引脚como0
‑ꢀ
como3与液晶屏lcd1的段码连接,引脚seg0-seg7与液晶屏lcd1的位码连接,引脚vdd连接电源vcc,引脚/cs连接芯片u1的引脚p36,引脚/rd连接芯片u1的引脚p35,引脚/wr连接芯片u1的引脚p34,引脚data连接芯片u1的引脚p33。
52.所述显示模块的液晶屏lcd1为四位的显示,用来显示车速。芯片u3的引脚cs为片选端,引脚rd是读取液晶屏数据的控制端,用于读取液晶屏的数据。引脚wr是写操作控制端,用于对液晶屏写入数据。引脚data是数据端,用于传输数据。
53.进一步的,所述卸粪板上安装有把手,方便打开卸粪。
54.进一步的,所述推拉杆为电动液压杆,方便控制。
55.本发明的牲畜粪便自动收集机器人,具体实施时,打开智能车体3上的开关按钮11,通过遥控器36上按键控制机器人的智能车体,智能车体采集相关信息控制相应的电机、推拉杆等装置,从而使机器人进行铲粪、卸粪的操作。
56.当需要前进或加速时,按压遥控器36上的按键k1,信号传送至遥控器36的主控芯片u1,主控芯片u1再通过无线通讯模块将需求传送至智能车体内的主控芯片u1,主控芯片
u1对动力电机进行前进或加速控制,机器人前进或加速。
57.当需要后退或减速时按压遥控器36上的按键k2,原理同上。
58.当需要左转时,按压遥控器36上的按键k3,信号传送至遥控器36的主控芯片u1,主控芯片u1再通过无线通讯模块将需求传送至智能车体3内的主控芯片u1,主控芯片u1对转向电机21进行转向控制,转向电机21的转向动力臂23向左拉动前转向拉杆25、后转向拉杆22旋转,前转向拉杆25、后转向拉杆22拉动左前轮胎24、左后轮胎19转向,从而实现机器人向左转向。
59.按键k4是机器人的右转按键,原理同上。
60.按键k5、k6是车的自动和手动按键,可以控制车的运行方式,当手动状态下,可以通过按键k1、k2控制机器人前走、后退,长时间按下按键k1、k2,就会加快前进或者后退的速度。在自动状态下,机器人会自动巡视周边是否有牲畜粪便,找到目标后,车会朝着目标行驶,推拉杆6回缩,铲粪板7前端挨住地面,前挡板8打开,机器人前进进行铲粪,铲到粪后,完成收集,推拉杆6伸开,铲粪板7前端抬高,然后装车,粪顺着铲粪板进入储粪箱,当储粪箱的粪装满后,打开卸粪板卸粪即可。
61.当智能车体3电量不足时,可通过充电口10进行充电,保证机器人正常工作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
