具有人机协同功能的开颅手术机器人系统
【技术领域】
1.本发明涉及医疗机械技术领域,具体地说,是一种具有人机协同功能的开颅手术机器人系统。
背景技术:
2.神经外科是研究人体神经系统的学科,例如研究人脑和周围的神经系统以及颅骨、头皮等结构损伤、肿瘤、炎症的疾病均含在神经外科的范畴。治疗例如脑肿瘤、脑溢血之类的疾病,需要切开脑组织,暴露病灶从而进行切除,因此开颅手术是治疗部分疾病的部分过程。现有技术中,开颅手术首先需要在颅骨上打孔,然后通过铣刀将病灶区域的颅骨锯开取下,但由于人体颅骨的较为坚硬,钻头和铣刀在接触颅骨时,极易产生振动发生便宜,造成病灶区域的切除误差,因此亟需设计一种防止钻头和铣刀超出预订范围的开颅手术机器人系统。
技术实现要素:
3.本发明的目的是针对现有技术中的不足,提供一种具有人机协同功能的开颅手术机器人系统。
4.为实现上述目的,本发明采取的技术方案是:
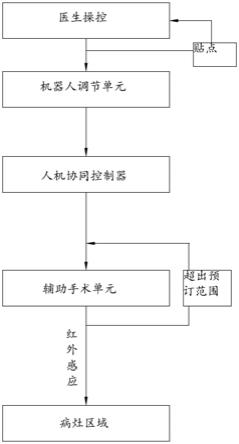
5.具有人机协同功能的开颅手术机器人系统,包括人机协同控制器、机械人调节单元1和辅助手术单元,所述人机协同控制器控制机械人调节单元11和辅助手术单元,所述机械人调节单元1一端设置在机器人底座上,所述机械人调节单元1的另一端设置有区域固定装置和辅助手术单元,所述区域固定装置用于在对应病灶位置设置区域防止所述辅助手术单元偏移,所述区域固定装置包括一卡盘,所述卡盘上设置有调节轨道,所述调节轨道内设置有若干定位点,所述定位点通过调节轨道调整位置从而与患者头部的贴点相对应;所述定位点上还设置有伸缩杆,所述伸缩杆由所述定位点向患者头部的贴点伸长,所述伸缩杆的端部设置有红外感应装置;当所述手术组件运作超出所述定位点所形成的区域时,立即停止所述手术组件的运作。
6.优选的,所述辅助手术单元包括用于钻孔的钻头和用于切开颅骨铣刀,所述辅助手术单元的端部设置有停滞组件,所述钻头和铣刀在运作时,触碰到所述定位点形成的区域时,通过停滞组件立即关停所述钻头和所述铣刀的运作。
7.优选的,机械人调节单元1包括第一调节段、第二调节段和第三调节段,所述机械人调节单元1通过一旋转台旋转连接在所述机器人底座上,所述旋转台上端固定连接有滑动安装座,所述机械人调节单元1通过滑动安装座可在旋转台上靠近或远离患者。
8.优选的,所述滑动安装座一端连接至所述旋转台,另一端设置有第一角度调节机构,所述第一角度调节机构的另一端连接有第一支架,所述第一支架、所述第一角度调节机构和所述滑动安装座构成第一调节段。
9.优选的,所述第一支架的一端连接有第二调节段,所述第二调节段包括与所述第
一支架固定连接的旋转安装座,所述旋转安装座的一端安装有第二支架。
10.优选的,所述第二支架的一端设置有第三调节段,所述第三调节段包括一调节固定座,所述调节固定座与所述第二支架固定连接。
11.优选的,所述第一支撑架与第二支撑架均采用两块平板交叉而形成,两块所述平板互相垂直。
12.本发明优点在于:
13.1、本发明的红外感应装置进行限位,使得辅助手术单元仅能在规定区域内运作,使得手术范围更加精确。
14.2、本发明的停滞组件立体限制驱动电机的转动,使得钻头和铣刀立即停止,避免对患者的头部造成更大的创口与伤害。
15.3、本发明的滑动安装座带动机器人在旋转台上滑动,从而靠近或远离病人,通过旋转台以及滑动安装座,实现对病人距离的控制。
16.4、本发明的第一调节段和第二调节段互相配合,使得机器人能够适应更多工况
【附图说明】
17.附图1是本发明具有人机协同功能的开颅手术机器人系统系统在一实施例的人机协同的结构示意图;
18.附图2是本发明具有人机协同功能的开颅手术机器人系统在一实施例中的立体示意图;
19.附图3是本发明具有人机协同功能的开颅手术机器人系统在一实施例中的正视图;
20.附图4是本发明具有人机协同功能的开颅手术机器人系统的辅助手术单元示意图。
21.附图中涉及的附图标记和组成部分如下所示:
22.1、机器人;2、机器人底座;3、辅助手术单元;4、滑动安装座;5、第一角度调节机构;6、第一支架;7、旋转安装座;8、第二支架;9、调节固定座;10、调节轨道;11、伸缩杆;12、钻头。
【具体实施方式】
23.下面将结合本发明实施例中的附图,对本发明所描述的技术方案进行清楚、完整地描述,显然,本说明书中所描述的实施例仅是本发明的一部分可行技术方案,本领域普通技术人员基于本发明的实施例,在没有作出任何创造性劳动的基础上得到的其他实施例,应当视为属于本发明保护的范围。
24.需要说明的是,本发明实施例中所使用的“第一”“第二”等描述近用于描述目的,不应当理解为其指示或隐含指示所限定的技术特征的数量,由此,本说明书个实施例中限定有“第一”“第二”的特征可以表明包括至少一个该被限定的技术特征。
25.本说明书中所记载的本发明的各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时,应当认为该技术方案的结合不存在。
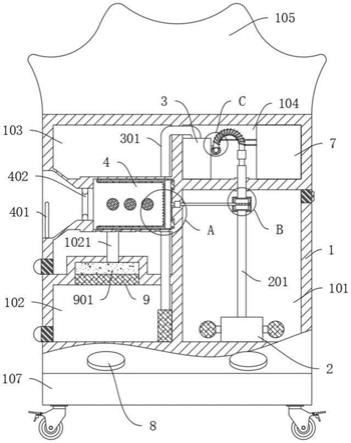
26.如图1-4所示,具有人机协同功能的开颅手术机器人系统,包括人机协同控制器、机械人调节单元1和辅助手术单元,所述人机协同控制器控制机械人调节单元1和辅助手术单元,所述机械人调节单元1一端设置在机器人底座2上,所述机器人底座2安装在所述机械人调节单元1的一端,所述机械人调节单元1的另一端设置有区域固定装置和辅助手术单元3,所述区域固定装置用于在对应病灶位置设置限制区域防止所述辅助手术单元3偏移,所述区域固定装置包括一卡盘,所述卡盘上设置有调节轨道10,所述调节轨道10内设置有至少三个定位点,所述定位点通过调节轨道10调整位置从而与患者头部的贴点相对应;所述定位点上还设置有伸缩杆11,所述伸缩杆11由所述定位点向患者头部的贴点伸长,所述伸缩杆11的端部设置有红外感应装置;当所述手术组件运作超出所述定位点所形成的区域时,立即停止所述手术组件的运作。
27.具体的,具有人机协同功能的开颅手术机器人系统,包括一机器人底座2和机械人调节单元1,机器人底座2安装在所述机械人调节单元1的一端,用于使得机械人调节单元1保持固定,确保机器人在辅助开颅手术时能够保持相对位置的固定,从而确保手术的安全性和完整性,机械人调节单元1的另一端设置有区域固定装置和辅助手术单元3,区域固定组件用于于在对应病灶位置设置区域防止所述辅助手术单元3偏移,区域固定装置包括一卡盘,卡盘上设置有调节轨道10,调节轨道10面积大于病人头部,从而使得调节轨道10上的定位点可以对头部的病灶区域全面覆盖,定位点至少有三个,通过两点确定一条直线,每两个定位点之间形成一条直线,从而形成一块区域,定位点越多,形成的病灶区域就越准确;定位点设置在调节轨道10内,并在调节轨道10内移动,从而与患者头部的贴点相对应,定位点上设置有一伸缩杆11,伸缩杆11向患者头部延伸,伸缩杆11的端部设置有红外感应装置,向伸缩杆11的周侧进行散射,多个红外感应装置共同合围了手术区域,当辅助手术单元运作超过了手术区域时,红外感应装置感应到并立即停止手术组件的运作,从而避免手术组件伤害到患者的其他部位。
28.需要说明的是,定位点和贴点在对应好之后,会保持相对位置的固定,即定位点不会随着辅助手术单元振动,定位点与贴点可采用磁铁的形式保持相对位置固定,从而在辅助手术单元振动时,定位点在调节轨道内滑动,从而保持手术区域的稳定。
29.优选的,所述辅助手术单元3包括用于钻孔的钻头12和用于切开颅骨铣刀,所述辅助手术单元3的端部设置有停滞组件,所述钻头12和铣刀在运作时,触碰到所述定位点形成的区域时,通过停滞组件立即关停所述钻头12和所述铣刀的运作。
30.具体的,辅助手术单元3包括用于钻孔的钻头12和用于切开颅骨铣刀,钻头12与铣刀设置在定位点合围成的区域内,钻头12与铣刀的端部设置有停滞组件,一旦钻头12和铣刀在运作时触及红外感情装置,停滞组件立即关停钻头12和铣刀的运作。
31.需要说明的是,停滞组件可设置在钻头12与铣刀的驱动电机的输出轴,当触碰到红外线被感应到时,通过控制程序将电讯号传递到停滞组件,则停滞组件立体限制驱动电机的转动,使得钻头12和铣刀立即停止,避免对患者的头部造成更大的创口与伤害。
32.优选的,所述机械人调节单元1通过一旋转台旋转连接在所述机器人底座2上,所述旋转台上端固定连接有滑动安装座4,所述机械人调节单元1通过滑动安装座4可在旋转台上靠近或远离患者。
33.具体的,机器人底座2上设置有一旋转台,旋转台上设置有滑动安装座4,机械人调
节单元1设置滑动安装座4上,旋转台转动调节机器人的角度,滑动安装座4带动机械人调节单元1在旋转台上滑动,从而靠近或远离病人,通过旋转台以及滑动安装座4,实现对病人距离的控制。
34.优选的,机械人调节单元1包括第一调节段、第二调节段和第三调节段,所述滑动安装座4一端连接至所述旋转台,另一端设置有第一角度调节机构5,所述第一角度调节机构5的另一端连接有第一支架6,所述第一支架6、所述第一角度调节机构5和所述滑动安装座4构成第一调节段。
35.具体的,机械人调节单元1包括第一调节段、第二调节段和第三调节段,滑动安装座4一端连接至所述旋转台,另一端设置有第一角度调节机构5,旋转台用于调节水平角度,第一角度调节机构5用于调节竖直方向的角度,从而与旋转台互相配合,使得机械人调节单元1可以适应更多角度的工作;第一角度调节机构5的另一端连接有第一支架6,第一支架6与第一角度调节机构5构成第一调节段,用于调节机器人的工作角度。
36.优选的,所述第一支架6的一端连接有第二调节段,所述第二调节段包括与所述第一支架6固定连接的旋转安装座7,所述旋转安装座7的一端安装有第二支架8。
37.具体的,第一支架6的一端连接有第二调节段,第二调节段包括与所述第一支架6固定连接的旋转安装座7,旋转安装座7的一端安装有第二支架8,旋转安装座7的旋转方向与第一角度调节机构5垂直,从而使得第一调节段和第二调节段互相配合,使得机器人能够适应更多工况。
38.优选的,所述第二支架8的一端设置有第三调节段,所述第三调节段包括一调节固定座9,所述调节固定座9与所述第二支架8固定连接。
39.优选的,所述第一支撑架与第二支撑架均采用两块平板交叉而形成,两块所述平板互相垂直。
40.具体的,第一支撑架与第二支撑架均采用两块平板交叉而形成,两块所述平板互相垂直,从而既能够实现支架的轻量化,还能确保连接的稳定。
41.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本发明方法的前提下,还可以做出若干改进和补充,这些改进和补充也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。