1.本发明涉及了一种制动硬件冗余控制系统和方法,涉及了一种用于集成式电液制动线控系统硬件冗余的设计。
背景技术:
2.根据《gb 21670-2008乘用车制动系统技术要求和试验方法》的要求,应急制动充分发出的平均减速度不小于2.44m/s2。如果集成式电液制动线控系统硬件中的主芯片失效,则制动系统只有纯机械制动力,其虽然能满足法规要求,但车辆减速度会偏低。
3.如果车辆的变速箱具有机械锁止装置,则在驻车硬件失效时,车辆还是可以通过机械锁止装置实现驻车。如果车辆的变速箱没有机械锁止装置,尤其是现在的纯电动汽车几乎没有机械锁止装置,依靠而且仅能依靠驻车硬件,由于驻车硬件是电子部件,在考虑单点失效即主芯片或者主驻车驱动芯片失效时,将导致驻车功能丧失。
技术实现要素:
4.为了解决背景技术中存在的问题,本发明提出了一种硬件冗余的集成式电液制动线控系统和方法。
5.本发明的技术方案如下:
6.一、一种硬件冗余的集成式电液制动线控系统:
7.包括主芯片,实时监测行车制动驱动芯片、主驻车驱动芯片是否失效的结果;实时监测自身和辅芯片之间的通讯,进而获得辅芯片是否失效的结果,和接收来自辅芯片的辅驻车驱动芯片是否失效的信号,产生驻车的冗余反馈控制信号;
8.包括辅芯片,连接到主芯片,实时监测辅驻车驱动芯片是否失效的结果,并发送到主芯片;实时监测自身和主芯片之间的通讯,进而获得主芯片是否失效的结果,和接收来自主芯片的行车制动驱动芯片是否失效、主驻车驱动芯片是否失效的信号,产生驻车的冗余反馈控制信号;
9.包括行车制动驱动芯片,连接到主芯片,接收来自主芯片的行车制动信号进行行车制动控制;
10.包括主驻车驱动芯片,分别连接到主芯片和辅芯片,接收来自主芯片的驻车信号进行驻车控制;接收来自主芯片的冗余反馈控制信号进行行车制动/驻车控制;
11.包括辅驻车驱动芯片,分别连接到主芯片和辅芯片,接收来自辅芯片的冗余反馈控制信号进行行车制动控制/驻车控制。
12.系统还包括:
13.包括行车制动驱动桥路,连接在行车制动驱动芯片和行车制动电机之间;
14.包括左侧驻车驱动桥路,输入端连接主驻车驱动芯片/辅驻车驱动芯片,输出端连接左后轮,接收来自主驻车驱动芯片的驻车信号进而控制左后轮实施驻车;同时接收来自主驻车驱动芯片/辅驻车驱动芯片的冗余反馈控制信号进而控制左后轮实施行车制动/驻
车;
15.包括右侧驻车驱动桥路,输入端连接主驻车驱动芯片/辅驻车驱动芯片,输出端连接右后轮,接收来自主驻车驱动芯片的驻车信号进而控制右后轮实施驻车;同时接收来自主驻车驱动芯片/辅驻车驱动芯片的冗余反馈控制信号进而控制右后轮实施行车制动/驻车;
16.包括行车制动电机,分别连接到车辆的四个车轮。
17.所述的主芯片,还实时经行车制动驱动芯片监测行车制动驱动桥路是否失效的结果并产生用于行车制动的冗余反馈控制信号,和实时经主驻车驱动芯片监测左侧驻车驱动桥路和右侧驻车驱动桥路是否失效的结果并产生用于驻车的冗余反馈控制信号。
18.所述的主芯片和辅芯片之间的通讯,是串行外设接口spi、通用异步收发传输器uart、同步串行总线i2c、can/lin/flexray/ethernet,任选其中的一种,或者任选其中的两种进行组合,或者任选其中的多种进行组合。
19.二、用于集成式电液制动线控系统硬件冗余控制方法:
20.行车制动状态:
21.根据主芯片、行车制动驱动芯片或者行车制动驱动桥路是否失效的结果进行辅芯片、主芯片、主驻车驱动芯片的冗余反馈工作控制;
22.所述行车制动状态下,具体分为:
23.如图2所示,正常情况下,主芯片产生行车制动信号发送到行车制动驱动芯片,再经行车制动驱动芯片发送到行车制动驱动桥路进而控制四个车轮均进行制动控制。
24.(1)如图4所示,如果辅芯片通过主芯片和辅芯片之间通讯的监控进行有效地识别到主芯片失效,则辅芯片被激活,先进行主驻车驱动芯片被去能,再进行辅驻车驱动芯片激活,产生冗余反馈控制信号发送到辅驻车驱动芯片,再由辅驻车驱动芯片经左右侧驻车驱动桥路控制两个后轮实施行车制动;
25.(2)如图5所示,如果主芯片监测到行车制动驱动芯片或者行车制动驱动桥路失效,从而主芯片和主驻车驱动芯片被激活,辅芯片不被激活;主芯片产生冗余反馈控制信号发送到主驻车驱动芯片,再由主驻车驱动芯片经左右侧驻车驱动桥路控制两个后轮实施行车制动;左侧驻车驱动桥路和右侧驻车驱动桥路控制左后轮驻车电机和右后轮驻车电机,提供额外驻车电机的行车制动力,辅助车辆动态的行车制动。
26.驻车状态:根据主辅芯片、主辅驻车驱动芯片或者左右侧驻车驱动桥路是否失效的结果进行辅芯片、主芯片、主驻车驱动芯片、辅驻车驱动芯片的冗余反馈工作控制。
27.所述驻车状态下,分为:
28.(1)如图6所示,如果当辅芯片通过主芯片和辅芯片之间通讯的监控进行有效地识别到主芯片失效时,则辅芯片被激活,先进行主驻车驱动芯片被去能,再进行辅驻车驱动芯片激活,产生冗余反馈控制信号发送到辅驻车驱动芯片,再由辅驻车驱动芯片经左右侧驻车驱动桥路控制两个后轮实施驻车;
29.(2)如图7所示,如果当主芯片通过主芯片和辅芯片之间通讯的监控进行有效地识别到辅芯片失效时,则主芯片先进行辅驻车驱动芯片被去能,保持产生驻车信号并发送到主驻车驱动芯片,再由主驻车驱动芯片经左右侧驻车驱动桥路控制两个后轮实施驻车;
30.(3)如图8所示,如果当主芯片监测到主驻车驱动芯片失效时,则主芯片通过通讯
方式通知辅芯片,主芯片先进行主驻车驱动芯片被去能,再进行辅芯片和辅驱动芯片被激活,辅芯片产生冗余反馈控制信号发送到辅驻车驱动芯片,再由辅驻车驱动芯片经左右侧驻车驱动桥路控制两个后轮实施驻车;
31.(4)如图9所示,如果当辅芯片监测到辅驻车驱动芯片失效时,则辅芯片通过通讯方式通知主芯片,预先设置辅芯片默认配置辅驻车驱动芯片为静默状态,并不需要辅芯片或者主芯片再次去能辅驻车驱动芯片,保持产生驻车信号并发送到主驻车驱动芯片,再由主驻车驱动芯片经左右侧驻车驱动桥路控制两个后轮实施驻车;由此可以还是通过主芯片和主驻车驱动芯片实现驻车。
32.(5)如图10所示,如果当主芯片经主驻车驱动芯片监测到左侧驻车驱动桥路失效时,则保持产生驻车信号并发送到主驻车驱动芯片,再由主驻车驱动芯片经右侧驻车驱动桥路控制右后轮实施驻车;由此主芯片和主驻车驱动芯片通过控制右侧驻车驱动桥路实现驻车。
33.(6)如图11所示,如果当主芯片经主驻车驱动芯片监测到右侧驻车驱动桥路失效,则保持产生驻车信号并发送到主驻车驱动芯片,再由主驻车驱动芯片经左侧驻车驱动桥路控制左后轮实施驻车;由此主芯片和主驻车驱动芯片通过控制左侧驻车驱动桥路实现驻车。
34.本发明中:
35.(1)如果识别出主芯片、行车制动驱动芯片或者行车制动驱动桥路失效,则通过纯机械制动力,进行车辆动态和静态的行车制动;
36.(2)如果主芯片失效,则通过辅芯片和辅驻车驱动芯片,控制左后轮驻车电机和右后轮驻车电机,提供额外驻车电机的行车制动力,辅助车辆动态的行车制动;如果行车制动驱动芯片或者行车制动驱动桥路失效,则通过主芯片和主驻车驱动芯片,控制左后轮驻车电机和右后轮驻车电机,提供额外驻车电机的行车制动力,辅助车辆动态的行车制动;
37.(3)如果识别出主芯片或者主驻车驱动芯片失效,则通过辅芯片和辅驻车驱动芯片,实现驻车;如果识别出辅芯片或者辅驻车驱动芯片失效,则仍通过主芯片和主驻车驱动芯片,实现驻车;如果当有一侧驻车驱动桥路失效时,可以使用另一侧驻车驱动桥路,实现驻车。
38.本发明的有益效果是:
39.采用了本发明,则可以在纯机械制动力的基础上,叠加主/辅芯片提供的额外的驻车电机制动力,其可以有效地提高车辆减速度,如果驻车电机装在前轮,会进一步提高车辆减速度。
40.而采用了本发明,可以有效地解决背景技术中如果车辆的变速箱没有机械锁止装置因芯片失效而导致的驻车功能丧失问题。
附图说明
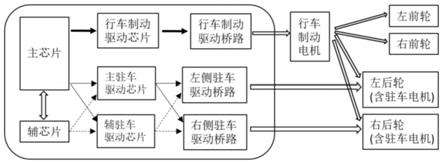
41.图1是实施例本发明的系统结构拓扑框架图;
42.图2是实施例没有失效时、进行车辆动态和静态的行车制动的工作状态图;
43.图3是实施例没有失效时、实现驻车的工作状态图;
44.图4是实施例如果主芯片失效、辅助车辆动态的行车制动的工作状态图;
45.图5是实施例如果行车制动驱动芯片或者行车制动驱动桥路失效、辅助车辆动态的行车制动的工作状态图;
46.图6是实施例如果主芯片失效、实现驻车的工作状态图;
47.图7是实施例如果辅芯片失效、实现驻车的工作状态图;
48.图8是实施例如果主驻车驱动芯片失效、实现驻车的工作状态图;
49.图9是实施例如果辅驻车驱动芯片失效、实现驻车的工作状态图;
50.图10是实施例如果左侧驻车驱动桥路失效、实现驻车的工作状态图;
51.图11是实施例如果右侧驻车驱动桥路失效、实现驻车的工作状态图;
52.图12是实施例主芯片和辅芯片之间的通讯连接图。
具体实施方式
53.下面结合附图和具体实施对本发明作进一步说明。
54.如图1所示,具体实施包括主芯片,实时监测行车制动驱动芯片、主驻车驱动芯片是否失效的结果;产生正常的行车制动信号并发送到行车制动驱动芯片,产生正常的驻车信号并发送到主驻车驱动芯片;实时监测自身和辅芯片之间的通讯,进而获得辅芯片是否失效的结果,和接收来自辅芯片的辅驻车驱动芯片是否失效的信号,选择产生行车制动、辅助车辆动态的行车制动和驻车的冗余反馈控制信号;产生对辅驻车驱动芯片的静默控制信号;
55.包括辅芯片,连接到主芯片,实时监测辅驻车驱动芯片是否失效的结果,并发送到主芯片;实时监测自身和主芯片之间的通讯,进而获得主芯片是否失效的结果,和接收来自主芯片的行车制动驱动芯片是否失效、主驻车驱动芯片是否失效的信号,选择产生辅助车辆动态的行车制动和驻车的冗余反馈控制信号;产生对主驻车驱动芯片的静默控制信号;
56.包括行车制动驱动芯片,仅连接到主芯片,接收来自主芯片的行车制动信号进行行车制动控制;
57.包括主驻车驱动芯片,分别连接到主芯片和辅芯片,接收来自主芯片的驻车信号进行驻车控制;接收来自主芯片的冗余反馈控制信号进行行车制动/驻车控制;接收来自主芯片的辅助车辆动态制动信号进行冗余行车控制;接收来自辅芯片的是否静默控制信号进行主驱动芯片功能的被去能/被激活;
58.包括辅驻车驱动芯片,分别连接到主芯片和辅芯片,接收来自辅芯片的驻车信号进行驻车控制;接收来自辅芯片的辅助车辆动态制动信号进行冗余行车控制;接收来自主芯片的是否静默控制信号进行辅驱动芯片功能的被去能/被激活;
59.具体实施还包括:
60.包括行车制动驱动桥路,仅连接在行车制动驱动芯片和行车制动电机之间;
61.包括左侧驻车驱动桥路,输入端连接主驻车驱动芯片/辅驻车驱动芯片,输出端仅连接左后轮,接收来自主驻车驱动芯片的辅助车辆动态制动/驻车信号进而控制左后轮实施冗余行车控制/驻车;也可接收来自主驻车驱动芯片/辅驻车驱动芯片的冗余的辅助车辆动态制动/驻车信号进而控制左后轮实施行车制动冗余行车控制/驻车;
62.包括右侧驻车驱动桥路,输入端连接主驻车驱动芯片/辅驻车驱动芯片,输出端仅连接右后轮,接收来自主驻车驱动芯片的辅助车辆动态制动/驻车信号进而控制右后轮实
施冗余行车控制/驻车;也可接收来自主驻车驱动芯片/辅驻车驱动芯片的冗余的辅助车辆动态制动/驻车信号进而控制右后轮实施行车制动冗余行车控制/驻车;
63.具体实施包括行车制动电机,分别连接到车辆的四个车轮。
64.所述的主芯片,还实时经行车制动驱动芯片监测行车制动驱动桥路是否失效的结果并产生用于行车制动的冗余反馈控制信号,和实时经主驻车驱动芯片监测左侧驻车驱动桥路和右侧驻车驱动桥路是否失效的结果并产生用于驻车的冗余反馈控制信号。
65.本发明实现了集成式电液制动线控系统硬件冗余的设计。
66.如果芯片、行车制动驱动芯片或者行车制动驱动桥路失效,行车制动电机无法被驱动来提供行车制动力时候,可以用纯机械制动力,进行车辆动态和静态的行车制动。
67.主芯片和辅芯片之间的通讯,是串行外设接口spi、通用异步收发传输器uart、同步串行总线i2c、can/lin/flexray/ethernet,任选其中的一种,或者任选其中的两种进行组合,或者任选其中的多种进行组合。
68.当集成式电液制动线控系统硬件正常时,由主芯片、行车制动驱动芯片和行车制动驱动桥路控制行车制动电机,从而控制四个车轮,进行车辆动态和静态的行车制动,如附图1的硬件框中的粗实线箭头所示;由主芯片和主驻车驱动芯片控制左侧驻车驱动桥路和右侧驻车驱动桥路,从而控制两个后轮(如果两个驻车电机安装在前轮,则将前轮和后轮对换),实现驻车,如附图1硬件框中的细实线箭头所示。
69.在集成式电液制动线控系统硬件中,如果主芯片或者主驱车驱动芯片失效,其属于电子部件的单点失效,就无法实现驻车,所以需要有冗余设计,即对芯片和驱动芯片进行冗余;而且,根据系统计算和实车测试结果,如果车辆有一侧驻车可以正常工作,其是可以满足驻车要求的。因此,集成式电液制动线控系统硬件的设计冗余,需要辅芯片和辅驻车驱动芯片作为主芯片或者主驱车驱动芯片设计的冗余,需要辅芯片和辅驻车驱动芯片冗余,而不需要左侧车轮驱动桥路和右侧车轮驱动桥路设计的冗余,而且辅芯片默认配置辅驻车驱动芯片为静默状态,如附图1所示。
70.当集成式电液制动线控系统硬件异常时,其通过对主芯片和辅芯片之间通讯的监控:
71.(1)如果识别出主芯片、行车制动驱动芯片或者行车制动驱动桥路失效,则通过纯机械制动力和额外驻车电机的行车制动力,进行车辆动态和静态的行车制动;
72.(2)如果识别出主芯片或者主驻车驱动芯片失效,则通过辅芯片和辅驻车驱动芯片,实现驻车,如附图硬件框中的虚线箭头所示;
73.(3)如果识别出辅芯片或者辅驻车驱动芯片失效,仍通过主芯片和主驻车驱动芯片,实现驻车;
74.(4)如果当有一侧驻车驱动桥路失效时,可以使用另一侧驻车驱动桥路,实现驻车。
75.本发明具体实施情况如下:
76.在集成式电液制动线控系统硬件中,如果没有失效,主芯片控制行车制动驱动芯片,从而控制行车制动驱动桥路,从而控制行车制动电机,从而控制四个车轮,进行车辆动态和静态的行车制动,如图2所示。
77.在集成式电液制动线控系统硬件中,如果没有失效,由主芯片和主驻车驱动芯片
控制左侧驻车驱动桥路和右侧驻车驱动桥路,从而控制两个后轮(如果两个驻车电机安装在前轮,则将前轮和后轮对换),实现驻车,如图3所示。
78.在集成式电液制动线控系统硬件中,如果主芯片、行车制动驱动芯片或者行车制动驱动桥路失效,行车制动电机无法被驱动来提供行车制动力。所以,其可以用纯机械制动力,进行车辆动态和静态的行车制动。
79.在集成式电液制动线控系统硬件中,如果主芯片失效,通过主芯片和辅芯片之间通讯的监控,可以进行有效地识别,从而辅芯片被激活,先进行主驻车驱动芯片被去能,再进行辅驻车驱动芯片被激活,从而控制左侧驻车驱动桥路和右侧驻车驱动桥路,从而控制左后轮驻车电机和右后轮驻车电机,提供额外驻车电机的行车制动力,辅助车辆动态的行车制动,如图4所示。
80.在集成式电液制动线控系统硬件中,如果行车制动驱动芯片或者行车制动驱动桥路失效,从而主芯片和主驻车驱动芯片被激活,从而控制左侧驻车驱动桥路和右侧驻车驱动桥路,从而控制左后轮驻车电机和右后轮驻车电机,提供额外驻车电机的行车制动力,辅助车辆动态的行车制动,如图5所示(同图3)。说明,图5与图3相同,其表明:当车辆是动态时,驻车系统可以提供辅助的行车制动力进行行车制动;当车辆是静态时,驻车系统直接可以实现驻车。
81.在集成式电液制动线控系统硬件中,如果主芯片失效,辅芯片可以通过通讯方式监控到,因而辅芯片被激活,先进行主驻车驱动芯片被去能,再进行辅驻车驱动芯片被激活,从而控制左侧驻车驱动桥路和右侧驻车驱动桥路,从而控制左后轮驻车电机和右后轮驻车电机,实现驻车,如图6所示(同图4),图6与图4相同。图6与图4相同,其表明:当主芯片失效时,只能通过辅芯片,当车辆是动态时,提供辅助的行车制动力进行行车制动;当车辆是静态时,直接实现驻车。
82.在集成式电液制动线控系统硬件中,如果辅芯片失效,主芯片可以通过通讯方式监控到,先进行主芯片去能辅驻车驱动芯片,然后还是通过主芯片和主驻车驱动芯片控制左侧驻车驱动桥路和右侧驻车驱动桥路,从而控制左后轮驻车电机和右后轮驻车电机,实现驻车,如图7所示。
83.在集成式电液制动线控系统硬件中,如果主驻车驱动芯片失效,主芯片通过通讯方式通知辅芯片,先进行主芯片去能主驻车驱动芯片,再进行辅芯片和辅驱动芯片被激活,从而控制左侧驻车驱动桥路和右侧驻车驱动桥路,从而控制左后轮驻车电机和右后轮驻车电机,实现驻车,如图8所示。
84.在集成式电液制动线控系统硬件中,如果辅驻车驱动芯片失效,辅芯片通过通讯方式通知主芯片,因为辅芯片默认配置辅驻车驱动芯片为静默状态,所以不需要辅芯片再次去能辅驻车驱动芯片,然后还是通过主芯片和主驻车驱动芯片控制左侧驻车驱动桥路和右侧驻车驱动桥路,从而控制左后轮驻车电机和右后轮驻车电机,实现驻车,如图9所示。
85.在集成式电液制动线控系统硬件中,如果左侧驻车驱动桥路失效,辅芯片默认配置辅驻车驱动芯片为静默状态,主芯片和主驻车驱动芯片可以通过控制右侧驻车驱动桥路,从而控制右后轮驻车电机,实现驻车,如图10所示。
86.在集成式电液制动线控系统硬件中,如果右侧驻车驱动桥路失效,辅芯片默认配置辅驻车驱动芯片为静默状态,主芯片和主驻车驱动芯片可以通过控制左侧驻车驱动桥
路,从而控制左后轮驻车电机,实现驻车,如图11所示。
87.在集成式电液制动线控系统硬件中,主芯片和辅芯片之间的通讯方式,可以是串行外设接口spi、通用异步收发传输器uart、同步串行总线i2c、can/lin/flexray/ethernet
……
,任选其中的一种,或者任选其中的两种进行组合,也或者任选其中的多种进行组合,如图12所示。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。