监测用于土工设备的地面接合工具、系统和方法
1.相关申请
2.本技术要求2019年8月30日提交的标题为“监测用于土工设备和操作的地面接合工具、系统和方法(monitoring ground-engaging tool,system,and methods for earth working equipment and operations)”的第62/894,635号美国临时专利申请的优先权益,所述美国临时专利申请以全文引用的方式并入本文中。
技术领域
3.本公开涉及一种用于监测土工设备和/或操作的工具、系统和/或方法。
背景技术:
4.在各种土工活动中,地面接合产品(例如,斗齿)通常提供于土工设备上以保护底层设备免受不当磨损,并且在一些情况下还执行其它功能,例如,对地面或土地材料进行破碎。
5.在使用期间,此类地面接合产品可能会遇到负载重和磨损高的状况。这些状况可能会导致产品磨损或与土工设备分离。例如,当铲斗接合地面时,尖端或转接器可能会与挖掘刃分离。土工设备的操作者可能无法总是能够看到此类产品何时已与铲斗分离。继续操作地面接合产品缺失的土工设备可能会导致产出减少、土工设备上的其它部件过度磨损和/或下游设备损坏。
6.与挖掘和其它土工活动相关联的磨蚀环境也可引起地面接合产品磨损。过度磨损可导致产品在使用期间的断裂和/或丢失,以及设备效率和产出减少、燃料消耗成本更大等。
技术实现要素:
7.本公开涉及一种用于监测例如在开采、施工和/或疏浚中使用的土工设备和/或操作的工具、系统和/或方法。
8.在一个实施例中,一种监测系统和/或方法包含土工设备和监测工具。所述监测工具具有:移动装置,其相对于所述土工设备可移动到不同远程位置;以及所述移动装置上的传感器,其用以检测所述土工设备的至少一个受监测部分上的裂纹。
9.在另一实施例中,一种监测系统和/或方法包含土工设备和监测工具。所述监测工具具有:移动装置,其相对于所述土工设备可移动到不同远程位置;以及所述移动装置上的传感器,其用以检测所述土工设备的至少一个受监测部分的变形。
10.在另一实施例中,一种监测系统和/或方法包含土工设备和监测工具。所述土工设备具有地面接合产品,所述地面接合产品具有前端、后端、上侧和下侧。所述监测工具具有:移动装置,其相对于所述土工设备可移动到不同远程位置;以及所述移动装置上的传感器,其用以远程检测所述地面接合产品的至少所述下侧的特性。
11.在另一实施例中,一种监测系统和/或方法包含土工设备和监测工具。所述监测工
具具有:移动装置,其相对于所述土工设备可移动到不同远程位置;所述移动装置上的传感器,其用以检测所述土工设备的至少一个受监测部分的特性;以及控制器,其具有一个或多个非暂时性计算机可读存储介质、通信系统、以操作方式与所述一个或多个计算机可读存储介质耦合的处理系统以及程序指令,所述程序指令存储在所述一个或多个计算机可读存储介质上并且由所述处理系统执行。所述程序指令包含:接收由人员携带的至少一个信标和/或机器信标的位置;以及确定用于所述移动装置的避开所述至少一个信标的路径,以便监测所述土工设备的至少一个受监测部分。
12.在另一实施例中,一种监测系统和/或方法包含土工设备和监测工具。所述监测工具具有:移动装置,其相对于所述土工设备可移动到不同远程位置;所述移动装置上的至少一个传感器,其用以检测所述土工设备的至少一个受监测部分的特性和/或位于所述移动装置附近的任何人员;以及控制器,其使用可编程逻辑从所述传感器接收数据以确定所述土工设备和/或每个人员的位置并且在监测所述土工设备的所述至少一个受监测部分时沿着避开所述土工设备和/或每个人员的路径引导所述移动装置。
13.在另一实施例中,一种监测系统、工具和/或方法包含移动装置和所述移动装置上的传感器,所述传感器用于检测土工设备的至少一受监测部分的特性。所述移动装置包含无人驾驶飞行器(uav)。所述uav可遵循从原始位置(例如,服务车辆、固定位置等)到所述土工设备的飞行路径。所述uav可具有部分预编程的飞行路径,直到其可拾取设备的信标(或其它信号)和/或视觉辨识。此时,处理器可用于将所述uav移动到所述设备。所述传感器可经由设备上的传感器、视觉辨识等任选地检测所述设备、动臂、斗杆、铲斗和/或耐磨零件的位置和定向以进行所期望监测。gps可任选地作为这些其它系统的附加或代替,用于遵循飞行计划。优选地提供障碍物避让系统,使得无人机可避开自然障碍物(例如,山、树等)、人工障碍物(例如,其它设备)和/或人。
14.在另一实施例中,一种监测系统、工具和/或方法可检测待监测的耐磨零件和/或土工设备附近人的存在,以避免伤及任何人。作为示例,所述监测工具可检测工人佩戴的令牌(例如,信标)、光学辨识软件等。所述监测工具可与检测到的人保持规定的距离,和/或包含障碍物避让软件。类似地,所述监测装置也可检测其它设备、工具等,以避免与之接触。
15.在另一实施例中,一种监测系统、工具和/或方法包含移动装置,所述移动装置具有传感器以检测土工设备和/或相关联地面接合产品(例如,铲斗和/或斗齿)的位置和/或定向。以此方式,所述传感器可被定位成监测所述设备和/或耐磨零件的所期望部分。
16.在另一实施例中,一种监测系统、工具和/或方法包含:移动装置,其具有用以在操作期间检测土工设备的移动的传感器;以及控制器,其使用可编程逻辑控制所述移动装置的移动。所述系统、工具和/或方法包含收集关于所述土工设备以及任选地运输车辆和/或其它设备的路径、定向和/或位置的信息,使得可确定所述移动装置可在其中移动的实时安全区域。所述控制器使所述移动装置在安全区域中移动,以使所述传感器监测所述土工设备的至少一个受监测部分。
17.在另一实施例中,一种监测系统和/或方法包含在工地处的库存容器和监测工具。所述库存容器具有用于所述工地处的土工设备的一个或多个地面接合产品。所述监测工具具有:移动装置,其相对于所述库存容器可移动到不同远程位置;以及所述移动装置上的传感器,其用以检测所述库存容器中的每个所述地面接合产品的零件标识,以便监测所述工
地处的库存使用情况。
18.在另一实施例中,一种监测工具包含:移动装置,其相对于土工设备可移动到不同远程位置;以及所述移动装置上的传感器,其用以检测所述土工设备的至少一个受监测部分上的裂纹。
19.在另一实施例中,一种监测工具包含:移动装置,其相对于土工设备可移动到不同远程位置;以及所述移动装置上的传感器,其用以检测所述土工设备的至少一个受监测部分上的变形。
20.在另一实施例中,一种监测工具包含移动装置、至少一个传感器和控制器。所述移动装置相对于所述土工设备可移动到不同的远程位置。所述至少一个传感器处于所述移动装置上,以检测所述土工设备的至少一个受监测部分的特性和位于所述移动装置附近的任何人员。所述控制器使用可编程逻辑从所述传感器接收数据以确定所述土工设备和/或每个人员的位置,以及在监测所述土工设备的至少一个受监测部分时沿着避开所述土工设备和/或每个人员的路径引导所述移动装置。
21.在另一实施例中,一种人员障碍物避让计算系统包含一个或多个计算机可读存储介质、以操作方式与所述一个或多个计算机可读存储介质耦合的处理系统,以及存储在所述一个或多个计算机可读存储介质上并由所述处理系统执行的程序指令。所述程序指令包含:接收由人员携带的至少一个信标的位置;以及确定用于监测装置的避开所述至少一个信标的路径,以便监测土工设备的至少一个受监测部分。
22.各种上述实施方案和示例可一起或独立地使用。为了更好地理解本公开的优点和特征,可以参考以下描述事项和附图,其描述并示出与本公开有关的各种配置和概念。
附图说明
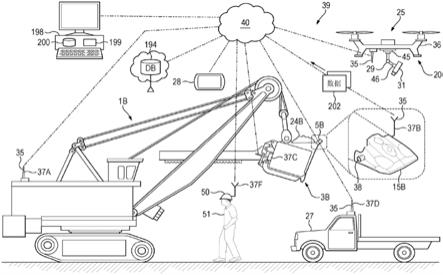
23.图1是土工机器的第一示例的侧视图。
24.图2是具有斗齿组件和护罩的铲斗的唇缘的透视图。
25.图3是图2中示出的斗齿组件中的一者的透视图。
26.图4是图3中示出的斗齿组件的底部透视图。
27.图5是图3中示出的斗齿组件的分解透视图。
28.图6是图5中示出的斗齿组件的下侧或底部的分解视图。
29.图7示出根据本公开的系统和其使用的第一示例,例如,其中系统包含工具,所述工具是用于监测土工设备上的产品的空中装置。
30.图8示出指示裂纹和变形的铲斗和唇缘的三维(3d)表示。
31.图9是根据本公开的与监测系统一起使用的具有人机界面(hmi)的移动手持装置的前视图。
32.图10示出工具和其使用的第二示例,例如,其中工具安装在车辆上并且用于监测土工设备上的产品。
33.图11示出根据本公开的过程。
34.图12示出根据本公开的系统和其使用的第二示例,例如,其中工具是用于监测地面接合产品的底部部分并将结果显示在土工机器上的监测器或显示器上的空中装置。
35.图13示出根据本公开的第二过程。
36.图14示出根据本公开的处于另一替代用途中的系统,例如,其中空中工具用于监测例如用于开采操作的例如破碎机的料斗或托运卡车的卡车托盘的装载状况。
37.图15是说明根据本公开的系统的示意性系统图。
具体实施方式
38.本公开涉及一种用于监测地面接合产品、土工设备(例如,挖掘机器、输送机设备和矿物处理设备)和/或土工操作的特性的工具、系统和/或方法。
39.在一个示例中,用于监测土工设备、操作和/或相关联产品的监测工具、系统和/或方法包含具有至少一个传感器的移动装置。所述监测工具、系统和/或方法可包含如针对2020年5月13日提交的第2016/0237640号美国专利申请公开案和第pct/us2020/032617号pct专利申请中的监测工具、系统和/或方法公开的所有特征、能力、实施例和/或操作,所述专利申请均以全文引用的方式并入本文中。
40.所述监测工具的传感器可检测所述设备和/或产品和/或其操作的一个或多个特性。所述特性可例如包含关于一个或多个产品和/或设备的零件和/或设备标识、位置、运动、操作限制、设备故障、设备接近度违规、定位系统传感器、存在、使用情况、状况、磨损、开裂、变形和/或性能和/或其操作的信息。所述土工设备可以是例如挖掘设备、输送机设备和/或矿物处理设备。
41.与零件和/或设备标识有关的信息和/或部件可例如包含如下事项:条形码、qr码、零件和/或设备编号、零件和/或设备标签、零件和/或设备信标、库存储桶标识、rfid、发送器,和/或所述工具能够收集和/或监测的其它标识方式。此类监测可在来自设备库存存放处(例如仓库、库存场或储桶)、矿场、矿物处理场等的各种设备的使用期间发生。
42.与操作限制相关的信息和/或部件可例如包含设备过满和/或设备应力超限等。与设备故障相关的信息和/或部件可例如包含如下事项:针对最大磨损设置的预定值(例如,顶部、侧面和/或底部磨损的磨损轮廓)、裂纹特性(例如,长度、深度、宽度等)、变形(例如,角度α、严重度等)、部件位置、性能等。
43.与设备接近度违规相关的信息和/或部件可例如包含如下事项:监测工具接近土工设备的预定安全半径、人与土工设备的接近度、人与工具的接近度、所述土工设备与另一土工设备的接近度,和/或土工设备到工具的接近度、安全半径违规等。
44.与定位系统传感器相关的信息和/或部件可例如包含如下事项:信标、磨损传感器、爆破监测传感器、道路状况传感器、材料监测传感器、流量监测传感器、装料传感器、人接近装置、位置传感器等。
45.与零件标识相关的信息和/或部件可例如包含如下事项:产品类型、产品编号、序列号、客户编号、品牌名称、商标、物料清单、维护说明、使用说明等。
46.与使用有关的信息和/或部件可例如包含如下事项:地面接合产品所固定到的土工设备的类型、挖掘循环的数目、挖掘循环的平均时间、占空比、产品在设备上的位置、产品应变、受阻负载、冲击等。
47.与土工设备和/或地面接合产品的状况相关的信息和/或部件可例如包含磨损、损坏、裂纹、变形等事项。
48.与性能相关的信息和/或部件可例如包含如下事项:挖掘速率、每次磨损增加量所
移动的吨数、装料速率、土工设备的处理量等。例如,一段时间内铲斗装载了多少材料、随着时间推移有多少材料被装载到了拖运卡车车体中(这包含测量转移过程中的材料损失)、一段时间内有多少材料通过了破碎机、随着时间推移有多少材料通过了滑槽或到输送机上,等。
49.与环境相关的信息和/或部件可包含如下事项:天气(例如,温度)、露点、挖掘面状况、爆破边界条件、爆破碎片化、气压、湿度、风速、热指数、风寒指数、可见性、烟雾等。
50.这些特性可单独使用由监测工具生成的数据或结合来自例如地面接合产品和/或土工设备、数据库和/或其它远程装置(即,远离所述工具)中的传感器的其它信息来确定。作为示例,额外信息可包含矿场地质情况、碎片化信息、使用的机器、燃料消耗、施加的负载、应变、冲击、服务持续时间、过往历史等。所述系统可用于确定如下事项:挖掘某些材料的位置和时间表、产品的更换计划等。工具还可用于检测产品丢失(例如,存在)。这些受监测特性仅作为示例给出,并非旨在具有限制性。
51.土工设备可例如包含挖掘设备、地面输送设备和/或矿物处理等事项。挖掘设备旨在作为一般术语指代各种挖掘机器中的任一种,其用于开采、施工和其它活动,并且例如包含装载机、拉铲挖掘机、电缆铲、正铲挖掘机、液压挖掘机、连续采矿机、推土机、掘进机、剪切滚筒、挖泥船绞刀(dredge cutter)等。挖掘设备还可指固定到或可固定到挖掘机器的地面接合资本产品(capital product),其可例如包含铲斗、刀片、滚筒、刀头等事项。地面输送设备也旨在作为一般术语指代各种设备,其用于输送或以其它方式运输土料,并且可包含例如滑槽、拖车、输送机、材料搬运机、馈料机、破碎机、拖运卡车等。地面输送设备还可指用于此设备的资本产品,包含例如卡车托盘。矿物处理设备也旨在作为一般术语指代用于处理挖掘的材料的设备,所述设备可例如包含破碎机、分离器、铣床、旋风分离器等。
52.为了论述方便,使用例如前、后、顶部、底部等相对术语。术语前或前向通常(除非另行说明)用于指示在使用期间(例如,在挖掘时)土料相对于所述产品的常见行进方向,而上或顶部通常用于指材料在例如被收集到铲斗中时经过的表面。尽管如此,应认识到,在各种土工机器的操作中,地面接合产品在使用期间可能以各种方式定向并且在所有类型的方向上移动。
53.图1示出作为开采挖掘机1的土工设备的示例。挖掘机1配备有动臂2,所述动臂具有用于在挖掘时收集土料24的铲斗3。其它挖掘机器以及铲斗的多种配置是已知的,并且铲斗几何结构存在变化。例如,图7示出作为电缆铲1b的土工设备。电缆铲1b具有带有铰接底部门以释放收集的材料24b的铲斗3b。所述监测系统、工具和/或方法可与其它类型的机器和/或铲斗配置一起使用,所述机器和/或铲斗配置可例如包含具有不带顶部壁的铲斗的拉铲机、具有其中侧壁铰接的铲斗的正铲挖掘机等。特定机器和/或铲斗并非旨在进行限制,因为本公开可结合各种类型的机器、铲斗以及结合用在各种不同类型的土工设备上的各种类型的耐磨零件、附接件和部件而使用。此外,虽然本公开主要结合挖掘设备公开所述监测系统、工具和/或方法,但这些系统、工具和/或方法也可用于监测其它土工设备,例如输送设备和/或矿物处理设备。
54.参考图2,铲斗3包含限定用于在挖掘操作期间收集材料的腔16的壳4。壳4包含具有用以将铲斗3附接到土工设备1的附接支撑件8的后壁12,以及位于后壁12的每一侧的一对相对侧壁14。铲斗3具有限定铲斗3的挖掘刃34的唇缘5。斗齿组件7和护罩9固定到挖掘刃
34以保护刃34,破碎唇缘5前面的地面,并且将材料收集到铲斗3中。作为一个示例,斗齿和护罩可如以全文引用的方式并入本文中的美国专利9,222,243中所公开,但可使用许多其它类型。
55.参考图3到6,每个斗齿7包含将焊接到唇缘5的转接器11、安装在转接器11上的中间转接器13和安装在中间转接器13上的尖端(也称为尖顶)15。尖端15包含底部表面26和相对的顶部表面26a、用以接收中间转接器13的鼻端17的向后开口腔18,以及用以穿透地面的前端19。中间转接器13包含底部表面30、相对的顶部表面30a,以及用以接收转接器11的向后开口腔22。转接器11包含鼻端23、底部表面32、相对的顶部表面32a,以及跨骑唇缘5的向后延伸支腿32c。唇缘5包含底部表面33、相对的顶部表面33a和前边缘33b。同样,护罩9还包含底部表面、相对的顶部表面、前边缘和跨骑唇缘5的一对向后延伸支腿(未示出)。锁21用于将耐磨构件15固定到中间转接器13,以及将中间转接器13固定到转接器11(图6)。
56.根据此示例斗齿7,尖端15通常会磨损,并且需要在更换其它斗齿部件之前更换多次。中间转接器13可被称为耐磨零件15的基部,或被称为耐磨零件本身。同样,转接器11可被认为是中间转接器13(或尖端)的基部或耐磨零件。当此类地面接合产品达到建议的最小磨损轮廓(例如,耐磨构件被视为完全磨损)时,产品会被更换,使得产出不会减少和/或上面安装有所述产品的基部不会经历不必要的磨损。
57.为易于论述,本公开大体上论述监测固定到挖掘铲斗的特定斗齿组件的一个示例。然而,所述工具或系统可用于监测其它产品、特性、操作、土工设备和/或土料。
58.参考图7,示出根据本公开的一个示例的系统39。系统39可例如包含具有地面接合产品3b的土工设备1b、通信网络40、监测工具25、数据库194、运输车辆27、人接近装置50、计算系统198和/或手持装置28。土工设备1b包含通信装置35、信标37a和/或其它无线发送器和/或接收器。土工设备1b包含具有唇缘5b并承载负载24b的铲斗3b。唇缘5b具有带有尖顶15b的斗齿。尖顶15b可包含通信装置35、信标37b和/或其它无线发送器和/或接收器。铲斗3b也可包含通信装置35、信标37c和/或其它无线发送器和/或接收器。工人51也可具有信标37f。
59.土工设备1b、运输车辆27、工具25、地面接合产品3b、15(例如,铲斗和耐磨构件)、人接近装置50、计算系统198和/或手持装置28各自任选地通过通信网络40通信。通信网络40的示例包含内联网、互联网、因特网、局域网、广域网(wan)、开采场网络、无线网络(例如,wap)、安全定制连接、有线网络、虚拟网络、软件定义网络、数据中心总线和背板,或任何其它类型的网络、网络组合或其变体。通信网络40表示任何网络或(物理或虚拟)网络的集合,并且可包含各种元件,例如开关、路由器、光纤、布线、无线和走线以连接系统39的各种元件。系统39部件与其它计算系统之间的通信可通过通信网络40或网络并根据各种通信协议、协议的组合或其变体进行。上述通信网络和协议众所周知,此处无需详细论述。应了解,网络40仅是根据本发明技术的实施例的多个可能配置的示例性表示。在其它示例中,系统39的各种部件在地理上可处于相同位置和/或可以是分布式的。
60.如图7中所示,监测工具25可包含移动装置36、通信装置35、传感器31和可操纵臂29。工具25远离(即,独立于)土工设备1b,并且优选地可通过移动装置36移动。虽然工具25可系链到土工设备1b,但工具25仍被视为远离或独立于设备,因为所述工具仍可独立于设备而移动到系链的极限。使工具25远离或独立于土工设备1b会保护工具免受与土工设备相
关联的振动和冲击震动。移动装置36使工具25能够移动,这允许工具25例如提高其监测地面接合产品和/或一次监测多于一个产品或土工设备的能力。使用独立于土工设备的移动装置还可最小化或消除修改部件或将部件附接到设备中的需要。
61.在一个示例中,移动装置36是呈例如无人机、直升机、软式飞艇、飞机或其它飞行器形式的uav 20。在另一示例中,移动装置36呈安装在服务卡车上的机器人或rov的形式(图10)。在另一示例中,移动装置36可以是执行不同功能的设备的部分,例如以引用的方式并入本文中的第20190360180号美国公开案中所公开。使用例如uav的移动装置36、基于地面的移动机器人、rov、服务车辆27或手持装置38来确定关于产品的信息是有利的,因为工具25可提供独特且不同的优点。由于移动装置36可相应地定位以进行监测,因此优势在于,土工机器不需要停机时间来监测地面接合产品。结合移动装置36使用工具25还可实现在挖掘循环期间在不同点处获取读数,而不会约束挖掘操作或危及人员。使用移动工具25可准许传感器31紧密接近受关注区域(例如产品)以安全可靠地收集信息。某些实施例,例如无人工具(例如,uav、rov等),可允许在使用土工设备时进行安全监测。使用移动工具25还允许协调并有效地监测多个产品(例如,斗齿、护罩、铲斗等)、产品的不同部分(例如,背侧或下侧),和/或监测多于一个土工设备(例如,其它挖掘机器、拖运卡车、输送设备、破碎机等)。
62.存在许多现成的可修改以用作本实施例的监测工具的uav。例如,uav 20可能需要操作者借助操纵杆来操纵uav 20。uav可手动地、自主地进行控制或组合操作员的控制和编程控制以进行飞行、起飞和/或着陆。另外,uav 20可自动地悬停在土工设备上方的适当位置。在另一示例中,uav 20可能无需操作者来进行起飞或着陆,并且可在着陆之前按设定模式飞行。uav 20可进行协调以免着陆在uav 20起飞的相同地点或位置。
63.工具25可与包含例如计算系统198的一个或多个远程装置通信。计算系统198可具有处理器199和上面写入有计算机指令的存储器200。计算系统198可包含例如下文论述的各种部件(图15)。计算系统198可包含单个计算机和/或处于单个位置或不同位置的多个计算机和/或处理器,其中此类计算机和/或处理器协作地或独立地工作。计算系统198的各种部件在地理上可几乎处于相同位置,和/或可以是分布式的。计算系统可被提供给例如手持装置28、云数据库194、其它数据源等其它远程装置和/或与来自所述其它远程装置的数据组合,以提供信息和分析。
64.在一个实施方案中,计算系统198可包含用于挖掘机器1b的发动机控制器单元(ecu)。ecu可向系统39提供关于但不限于发动机扭矩、燃料消耗、气温、发动机温度等数据。ecu数据可与来自工具25、铲斗3b、尖顶15b的传感器数据和/或来自其它源的数据结合,并且由计算系统198处理以提供各种输出。
65.工具25可任选地包含作为计算系统198的一部分的计算机、微处理器等。工具25还可任选地存储来自传感器31的数据,所述数据可连续地、周期性地、分批地或按类似方式以无线方式传送,或可在操作之后检索。系统的各种部件中的每一者或任一者还可任选地包含可形成计算系统198的一部分的单个处理器和/或存储器。在一个示例中,计算系统198可借助于通信装置35或通过其它已知方式促进工具25、各个系统部件(例如,设备1b、铲斗3b、尖顶15b、服务卡车27等)和/或其它远程装置之间通过网络40的通信。如所属领域的技术人员应了解,根据本发明技术的实施例的其它示例性计算系统198可包含与本文中示出和描
述的那些部件不同的部件。
66.计算系统198(无论是工具25的一部分和/或是远程的)可包含控制一个或多个传感器31的指令。传感器31与监测工具25的移动装置36物理耦合和/或安装在所述移动装置上,并且可被配置成检测或监测或捕捉地面接合产品的特性。传感器31可结合与工具25分开的其它传感器一起工作。在一个示例中,移动装置36上的传感器31可以是无源传感器,其收集数据并与土方移动设备上的有源传感器协作。作为一个示例,设备1b的有源传感器可生成从收集的矿石反射回来并由工具25上的传感器收集的x射线或偏振光。在另一示例中,传感器31的数据可结合从其它系统部件的传感器、数据库等中收集的数据一起使用。
67.在所示实施例中(图7),监测工具25可监测土工设备1b上的铲斗3b上的地面接合产品。作为示例,工具25可监测转接器11上的尖端15、中间转接器13上的尖端15、转接器11上的中间转接器13、挖掘刃34上的转接器11、浇注唇缘的鼻端、唇缘5上的护罩9、铲斗3上的唇缘5、铲斗3、铲斗24中的负载、支撑铲斗的土工设备1b、挖掘操作、挖掘的土堆(earthen bank)和/或相关联设备,例如拖运卡车。在其它示例中,工具25可监测犁壁(mold board)上的刀片、铲斗上的按钮或块、铲斗上的耐磨滑道或内衬、滑槽、土工设备上的铲斗、动臂和/或斗杆、滑槽或输送机上的材料传送、拖运卡车上的卡车托盘、刀头上的斗齿、滚筒上的镐、附连到铲斗的耐磨板、动臂上的铲斗、破碎机上的料斗,或其它类型的土工设备上的其它地面接合产品、其它类型的土工设备和/或其它类型的操作。在其它示例中,工具25可监测土工设备的操作,例如挖掘效率、最优挖掘路径、处理量等。在另一示例中,由工具25收集的数据可由计算系统198用以引导和/或控制土工设备的动作。例如,输出可提供给设备操作者以辅助对操作的控制,可被测评以用于确定效率、产出等。在另一示例中,数据可由控制自主土工设备的系统使用。在其它示例中,工具25可监测地面,例如矿物特性、碎片化、挖掘面或工作台拓扑等。本公开的某些实施方案涉及监测特性,例如与土工设备相关联的地面接合产品的存在、零件标识、操作限制、设备故障、设备接近度违规、定位系统传感器、使用情况、性能和/或状况、裂纹的存在和/或标识、变形的存在和/或标识。
68.在另一示例中,传感器31可用于生成可用于映射矿场或其它土工地点的数据,以估计在所述地点和/或工地使用的土工设备上的地面接合产品的特性。例如,收集的数据可用于生成矿物含量、碎片化、硬度、研磨性、地面接合产品的磨损率等事项的轮廓式映射。此类映射可提供更高效的挖掘、维护等。作为一个示例,此类映射可更好地确定产品更换计划、成本等。在另一示例中,由工具25收集的数据可与例如矿场地质情况、gps数据、碎片化等其它数据组合。所述数据可用于映射其它特性或以除映射以外的方式来处理地点数据,以生成类似信息。系统39数据可与传感器数据和/或来自其它源的数据结合,并且由计算系统198处理以提供各种输出。
69.传感器31可以是生成二维或三维表示的表面或亚表面表征装置(图8)。表面表征装置31创建或生成受监测产品的至少一部分的二维或三维表示、受监测的产品或产品表面的其它表示。例如,三维表示可由相机31捕捉的多于一个二维光学图像生成。在另一示例中,所述三维表示可仅为尖端15b的钻头部分19或底部表面,或用于磨损和/或分离的其它耐磨零件。监测装置25可包含从某一位置收集不同类型信息的多个表面表征装置31。作为示例,监测工具可收集处于红外、可见和/或紫外波长的目标位置的表面特性。收集的信息可整合在一起以与存储在数据库中的信息进行比较,以标识所述位置的表面组成。工具25
可收集用于表征目标的材料的高光谱图像(例如,以确定地里的矿物含量)。地面穿透雷达可用于收集地表下方的关键组分和/或属性。
70.传感器31可以是例如相机、lidar装置、3d装置、摄影测量装置,和/或其组合。在一个示例中,相机31可由工具25支撑(或可添加到另一表面表征装置),并且可被引导以连续地、在设定时间或基于事件(例如,在接收到触发事件或警示的发布后)例如捕捉地面接合产品的至少一部分的2d或3d轮廓以及在一些情况下捕捉其图像。由工具25收集的信息可提供到计算系统198和/或一个或多个其它远程装置,和/或从所述计算系统和/或一或多个其它远程装置提供,以用于连续、周期性地、按需或分批地处理或使用。不管递送模式如何,系统都可被操作以提供历史的和/或实时数据和/或测评。
71.许多摄影测量装置、数字相机和/或数字单透镜反射(dslr)相机的示例可用于以摄影测量法生成受监测产品和/或负载的三维或其它表示。例如,佳能(canon)出售名为eos 5d的数字相机,尼康(nikon)出售名为d700的数字相机,徕卡测量系统(leica geosystems)出售名为rcd30的数字相机,dot product llc出售名为dpi-7的基于平板电脑的结构光相机,structure sensor and isense具有基于平板电脑的数字相机,并且heuristic lab具有名为lazeeeye的智能电话数字相机,其可用于以摄影测量法生成例如受监测产品的磨损轮廓。各种相机31可与例如uav、基于地面的移动机器人、rov、服务卡车27、手持装置28等移动装置36集成。所述相机可生成二维或三维轮廓和/或其它信息。来自相机的数据可例如输出到数据库194和/或计算系统198以用于进一步处理,这在一个示例中可包含轮廓的生成。
72.可用于生成产品(例如,产品表面)和/或负载的二维或三维点云或其它表示的lidar装置的示例是由neptec technologies corporation出售的名为opal的lidar装置和/或leica geosystems出售的名为leica pegasus:two的lidar装置。zebedee和zeb1 lidar装置被设计为手持装置28,但可与uav或其它移动装置集成以生成受监测产品和/或负载的表示。由lidar装置生成的信息可输出到数据库和/或计算系统以供进一步处理,如下文将进一步论述。
73.可用于生成例如受监测产品、产品表面和/或负载的二维或三维点云(或其它表示)的3d激光装置的示例是由creaform出售的名为go!scan的激光装置和由riegl出售的名为vux-1的激光装置。与相机和/或lidar装置类似,激光装置可设计为手持装置28,与服务车辆(例如,轮式和/或履带式运输车辆27)、uav 20、基于地面的移动机器人、rov或其它移动装置36集成。
74.一旦生成表面表征(例如,点云41),计算系统198就可分析产品的表面。在示出的示例中,可监测壳4c的侧壁14c、后壁12c和唇缘5的变形。例如,可通过沿着侧壁14c的内部表面42的整个高度h1测量距离l1来确定变形。腔16c限定铲斗3c的内部42,并且距离l1的测量可沿着侧壁14c的外边缘43以及沿着内部42的任何点进行。作为三维表示41,可能仅侧壁14c的一部分变形,而不是整个壁14c、边缘43或内部42变形。如果距离l1示出与先前测量值有偏差,则可能检测到变形。作为示例,变形量可由偏差中的差异确定。在另一示例中,可通过将铲斗的先前表示覆盖到新表示41上并测量差异来测量变形。先前表示可以是先前测量和/或可以是工厂新零件的保存表示以作为比较的手段。变形可根据测得的包含非测量的保存表示的任何重复来测量。此类保存表示可存储在数据库194等存储器中。在另一示例中,可从沿着直线a和由倾斜或变形壁14c形成的直线b的过去角度测量产生角度α。角度α可
基于平均偏差、许多点的最大测量,和/或沿着例如内表面42的最佳拟合表示。一旦角度α达到预定值(例如,在1度与5度之间,优选3度)或相对于其它变形监测过程达到预定值,就可发出警示以修复铲斗3c。无论实施例如何,系统39的工具25、计算系统198和/或其它部件都可以无线方式向土工设备的操作者、维护人员、矿场管理者、供应商或其他人员提供警示。也可在达到预定值之前发出警示,使得可更具体地监测问题。监测工具25可包含例如其它传感器,例如加速度计、数字倾角仪单元、数字罗盘、rfid等,其可例如辅助监测移动装置36的位置。
75.监测工具25可用于检测对设备和/或产品造成的裂纹和/或其它损坏。传感器31可以是各种类型(例如,相机、lidar、激光装置、x射线装置等)。在一个示例中,云点表示41还可示出裂纹44。裂纹44具有沿着裂纹44的最长路径的可测量距离l2(例如,1cm)。长度也可确定为从一端到另一端的直线、确定为其沿着裂纹中心线的线性距离或以其它方式。也可通过宽度w1测量来测量裂纹44。宽度可在沿着长度的点处确定,确定为平均值、确定为最大值或以其它方式。裂纹44还可具有深度d1(例如,1mm),其可由监测装置25测量。如同长度和宽度,深度可确定为平均值、最大深度等。土工设备还可能沿着单个路径或多个路径具有多个裂缝,每个裂缝变成另一待测量和/或测评的裂纹44。长度、宽度和/或深度可用于确定裂纹的大小和/或严重度。例如,一旦测得值w1、l2、d1中的任一者达到预定值(例如,w1=2英寸,l2=5英寸,d1=0.25英寸),则可发出警示。另外,作为示例,可通过将先前云点呈现覆盖在新云点表示41上以测量宽度w1、长度l2和/或深度d1的差异来监测裂纹44的生长。如同变形检测,警示可在裂纹44起始时而非测得值宽度w1、长度l2、深度d1达到预定值时发出。
76.返回参考图7的工具25,工具25可包含用于操纵至少一个传感器31的操纵装置29(例如,铰接受控臂、从动万向接头等)。操纵臂29可在一端45处牢固地连接到移动装置36,并且在相对端46处牢固地连接到传感器31。在某些示例中,安装操纵装置29,使得其具有清晰瞄准线以监测产品、设备等。计算系统198(在移动装置上和/或远离移动装置)可包含控制操纵装置29的定向的指令。操纵装置29可例如是受控铰接臂、旋转头或其它操纵用具。
77.工具25可具有通信装置35,其用于通过网络40(或以其它方式)与计算系统198和/或系统39中远离工具25的各种部件通信。工具25上的通信装置35被配置成用于从电子传感器31和/或远程装置接收信息和/或数据,和/或将信息和/或数据发送到所述电子传感器和/或远程装置,所述远程装置例如手持装置28、运输装置27、数据库194和/或计算系统198,以及任选地与例如所述设备、铲斗、斗齿、护罩等其它系统部件中的传感器通信。
78.工具25、数据库194、手持装置28、计算系统198、设备1b、地面接合产品15等各自、其中的一些或全部可包含收发器等用于无线通信的通信装置35。系统39的各种部件还可包含信标37,其发送位置信息和/或其它信号以使得位置信息可例如通过信号强度来确定。替代地或另外可使用gps。必要时或如果特定操作需要,可使用多个天线35来增大拾取信号的可靠性。如果使用无线发送并且期望或需要添加以用于特定操作,则可使用多个天线和/或远程装置来增大拾取信号的可靠性。工具25可被配置成从例如裂纹、变形、存在、零件标识、存在、操作限制、设备故障、设备接近度违规、定位系统传感器、状况、使用情况、性能、磨损等特性收集数据。工具25还可与其它通信装置35以无线方式或通过有线连接传达哪个(哪些)特定产品可能需要维护,而原因是产品零件丢失、裂纹已达到预定值、变形已达到预定值,或因为产品磨损超过最小磨损轮廓。另外,工具25可任选地存储来自所述过程的结果。
系统信息可以各种方式发送,例如,通过可具有大于可见光谱(例如,红外、微波或射频[rf])的波长但可在超声波或x射线光谱中的电磁波、蓝牙等发送。
[0079]
监测装置25可包含励磁机或发送器35以将能量发送到目标,或作为接收器接收能量。发送的能量可刺激目标的材料以发射目标材料的能量特性。例如,照射在例如立方晶体结构等重复结构上的x射线将从分子结构反射,并且可表征所述结构和材料。从材料反射的光的偏振也可提供关于材料结构的信息。
[0080]
收发器35可以是例如电磁波接收器和/或发送器、激光接收器和/或发送器,或全球定位系统(gps),并且因此可以是位置信标。例如铲斗或斗齿的地面接合产品可被配置有通信模块35,例如存储部件的序列号、安装日期或制造日期等信息的低功耗蓝牙模块。工具25可轮询附近的蓝牙模块,并且从轮询范围内的任何或所有模块收集存储的数据。例如,工具25在库存储桶或容器的范围内通过。这样,工具25不需要瞄准库存,而是可仅通过或飞经库存储桶。
[0081]
关于矿石特性的信息可存储在例如数据库194、监测工具25、计算系统198和/或远程装置中。由监测工具25收集的数据可与存储的矿石特性进行比较,以确定收集的土料的组成。不同波长的矿石特性可存储在数据库中。例如,与反射光偏振和紫外线反射相关的矿石特性可分开存储。空中或其它移动工具25可携载单独的传感器31,例如用以收集所收集的矿石的关于偏振的表面特性的第一传感器,以及用以收集关于紫外光的数据第二传感器。可将收集的数据与存储的数据进行比较,以表征开采的或未开采的矿石的组成和/或浓度。空中装置可携载多于两个传感器。
[0082]
参考图7,系统39可包含能够监测人51例如在土工区域和/或工具25的某一区域内的位置的人接近装置50。例如,所述装置可加在土工区域地理围栏内并且附接到标准人类工作设备,例如安全帽、工人靴、背心和或其它类似衣物。人接近装置50可以是单独的,或建构在标准人类工作设备内。人接近装置50可包含检测人接近装置的位置、继而检测佩戴人接近装置50的人51的信标37f、传感器38等。监测工具可使用此信息来保持远离人接近装置的规定距离,和/或包含避让软件以防止接触存在于或接近受监测设备和/或产品的人。这允许实现更安全的工作场地,因为人们可能会执行与监测工具的功能相关或不相关的其它维护、维修和/或监测功能。工具25还可依赖于视觉辨识软件来避开工具和/或土工设备附近的人们。
[0083]
当移动装置36是uav 20时,具有工具25的运输车辆27可例如由位于运输车辆27内的操作者驾驶到或靠近土工设备1b(例如,在五英里半径或更小的范围内),但可远程或自主驾驶。工具25可由操作者直接操纵,由操作者经由手持装置28等上的用户输入远程操纵,或自主操纵。例如,工具25可利用位于工具25上的操纵杆和相机和/或传感器操纵。在替代示例中,监测工具25可被飞载到或飞到用于监测土工设备的位置,而不需要单独的运输车辆27将工具25移动到各处。
[0084]
在替代示例中,工具25可由手持装置28控制。在一些示例实例中,手持装置28可被配置成维持至少部分关于产品15的物理位置确定的飞行模式。当工具25监测产品时,操作者可在物理上握住手持装置28(图7)。手持装置28可以是用于增强现实或虚拟现实的头戴耳机。替代地,手持装置28可安装在固定的或可调整的支撑件上。手持装置28可以是例如可由操作者2握住和/或携带的计算机、电话、平板电脑、操纵杆或其它小型装置。手持装置28
可包含传感器31(例如,相机)。手持装置28可以是无线装置,可与挖掘设备中当前的显示系统(例如,与oem显示器)集成,可与挖掘设备内的新显示系统集成,和/或可位于远程位置。手持装置28可例如在土工设备的驾驶室、服务车辆、站、办公室等中。手持装置28还可包含具有处理器199的计算系统198,和/或组合来自工具25、云数据库194、其它数据源、其它远程装置等的数据,以提供信息和分析。
[0085]
在一个示例中,参考图9,传感器31和/或相关联的硬件或软件可被配置成生成例如产品的2d或3d轮廓,和/或捕捉特性数据并经由无线信号将特性数据从天线35传送到包含或耦合人机界面(hmi)71的手持装置28。手持装置28可包含处理器以处理往来于各种数据源和数据使用者的数据。数据可由与手持装置28连接的通信装置35发送和接收。手持装置28可被配置成接收与磨损轮廓、裂纹测量值、变形测量值相关的数据,并且根据接收到的数据生成轮廓。
[0086]
手持装置28包含显示器73。显示器73可示出固定到铲斗或以其它方式呈齿形式的地面接合产品,例如耐磨零件76。显示器可示出耐磨零件76和关注点77、78,例如上文描述的裂纹和/或变形位置。hmi 71可显示实时的或来自存储器的三维表示、3d轮廓和/或摄影或视频图形图像41。生成轮廓可例如与从存储器200——例如数据库198——检索的现有2d或3d轮廓进行比较。比较的结果可触发送往手持装置28的通知,所述通知可体现为警示100。hmi 71可例如提供关于每个产品的状态的视觉警示(例如,文本和/或图画图像)、触觉反馈(例如,振动)和/或音频警示。所述视觉警示可以是例如显示每个受监测产品以及每个产品的状态(即,不存在/存在、可接受磨损、损坏、需要维护以及产率降低)的图形图片73。可使用其它和/或附加警示。
[0087]
hmi 71的显示器73还可包含传感器调整界面110和/或导航界面112。uav导航界面112可包含控制uav 20的可编程逻辑、软件或应用。存储在存储器中以控制uav 20的可编程逻辑也可以或改为位于uav 20上。可例如根据gps坐标、在土工操作处确立的数据、在产品上确立的数据、在土工设备上确立的数据、在邻近土工设备的计算点处确立的数据等来确定uav 20的移动。传感器调整界面110可被配置成允许手动调整例如传感器31位置、相机角度、uav位置、uav高度、相机或传感器设置等。
[0088]
在另一示例中,hmi 71可被设计成显示产品的实况图像79,使得操作者可以视觉方式检查警示是否有效。hmi 71可被配置成提供产品76的当前状态的图形显示73。例如,显示器73可被配置成显示例如受监测产品76的轮廓和/或由传感器31(例如,相机)捕捉的图像。所述图像可以是实况视频馈送。显示器可被配置成显示静态图像和视频图像两者。可从相对于产品确定的有利位置而不是主要依赖于操作者对挖掘机器控制件的操控来捕捉轮廓79或图像。显示器73还可显示指示例如磨损程度的图形表示76。图形表示可以是或包含文本和/或数字值和/或状况,例如“破损斗齿”等。以此方式,工地处或与工地相关联的操作员或其他工作人员可以经由警示100得知产品的潜在问题或特性,并且能够确认或斟酌所述状况,和/或提供关于所述状况的严重程度的价值判断。以此方式,可避免不必要的停机。图形表示76可以是或包含与矿石组成和/或浓度相关的信息。
[0089]
在另一示例中,hmi 71可被设计成显示历史图表85,使得操作者可确定警示发生的时间,使得操作者可在产品丢失的情况下采取必要措施。以此方式,操作者能够作出关于产品76的更明智的决策。显示器73和/或类似配置的显示器也可供位于工地处、与工地相关
联或远离工地的其他人员使用。
[0090]
图10示出工具25a,其中移动装置是服务车辆27a。图10示出根据本公开的系统39a的另一示例。工具25a可包含用于操纵至少一个传感器31a的操纵装置29a(例如,铰接受控臂、从动万向接头等)。在示出的示例中,移动装置27a支撑传感器31a,使得工具31a可被操纵到点和/或位置而不需要附加的移动装置。在某些实施例中,操纵装置29安装在运输车辆27a上,所述操纵装置能够操纵传感器31以使得其具有用于监测例如产品15a的瞄准线。传感器31a可以是表面表征装置,例如,创建例如产品的至少一部分(例如,下侧)的二维或三维表示(例如,点云)或受监测的产品15a或产品表面的其它表示的相机或其它装置。电子传感器31a可与用于移除和/或安装产品的工具26a协作或包含于其中而使用。虽然铲斗3a示为未附接到土工设备,但工具25a可在铲斗固定到设备的情况下使用。
[0091]
图11是根据本公开的一个示例的用于确定裂纹和/或变形的存在和/或监测的过程或程序300。过程300可在部署在计算系统198中的软件应用程序、模块、部件或其它此类编程元素的上下文中用程序指令加以实施。程序指令引导一个或多个底层物理或虚拟计算系统如下操作,附带参考图11中的步骤。
[0092]
首先,给定监测工具25捕捉关于例如耐磨零件76的传感器数据202(步骤301)。捕捉的数据202可在形式上捕捉,然后转换成3d点云,或可捕捉为点云表示41(步骤303)。数据202可被发送到远离监测工具25的计算系统198或监测工具25上的计算系统198。如果被发送或其它方式,则程序300标识是否存在裂纹44和/或变形(例如,角度α)(步骤305)。例如,变形可通过包含上文所描述的各种不同方式来确定。
[0093]
接下来,所述程序确定在当前数据202之前是否存在裂纹或变形(步骤307)。如果裂纹和/或变形从未发生,则发出警示(步骤309)。在此情况下,在达到预定值之前发出警示,使得可更具体地监测问题。如果先前存在裂纹和/或变形,则确定自上次测量以来裂纹44和变形的差异(步骤311)。例如,裂纹44具有沿着裂纹44的最长路径的可测量距离l2。也可通过宽度w1测量来测量裂纹44。裂纹44还可具有深度d1,其可由监测装置25测量。测得值w1、l2、d1应对照预定值(例如,w1=2英寸,l2=5英寸,d1=0.25英寸)来衡量。在另一示例中,可通过将先前云点呈现覆盖在新云点表示41上以测量宽度w1、长度l2和/或深度d1的差异来监测裂纹44的生长。
[0094]
如果裂纹或变形的差异与先前相同,则结束(步骤313)。否则,如果变形(角度α)或裂纹44已增大而达到预定值(例如3度),则发出警示(步骤315)。
[0095]
图12示出根据本公开的系统439的另一示例。在系统439中,工具425飞到或被带到具有待受监测产品415的土工设备401。取决于使用的电子传感器431的类型,监测工具425可能有必要与土工设备401极为接近(例如30英尺或更小,优选在1英尺与5英尺之间)。
[0096]
如果工具425具有需要工具25极为接近土工设备401的传感器431,则工具425可与运输装置427、手持装置428、数据库494和/或其它远程装置437a、437b、437c、437d、437f通信以辅助工具的障碍物避让系统。作为一个示例,如果运输装置427、手持装置428、数据库494和/或其它远程装置中的任何一者包含gps传感器(例如,位于铲斗403上),则工具425可具有可编程逻辑,其计算障碍物避让系统的受保护区域(基于铲斗的已知几何结构和/或定向以及挖掘设备的已知几何结构和/或定向),使得即使铲斗403主动移动,工具425也可进入受保护区域。例如,工具25可沿着计算出的路径移动到允许工具25捕捉地面接合产品的
期望位置和/或定向(例如,下侧)的位置。在另一实施方案中,工具25可基于挖掘设备和/或地面接合产品的预测行为沿着计算出的路径移动到允许工具25捕捉地面接合产品的期望位置或定向的位置。人接近装置50的安全半径可能是必要的,并且可在监测装置进入安全路径之前计算到确定的路径中。与土工设备和系统439的各种其它部件的重复性质相比,安全半径可为人类移动的随机性留出空间。同样,工具25可包含避免接触土工设备的避让系统。
[0097]
在另一示例中,工具425可从土工设备接收位置信息,所述位置信息可有助于在土工设备401在使用和/或未使用时帮助工具425移动(例如,飞行)接近例如铲斗403。这可有助于确定例如尖顶15、中间转接器13、转接器11、护罩9和/或唇缘5的状况和/或磨损轮廓。使用例如uav 20的移动装置36可允许传感器检测难以监测的表面,包含例如各种耐磨零件的底部表面。
[0098]
计算系统498可使用工具425或系统439的可编程逻辑来处理来自至少一个传感器431的信息(例如,用以创建3d轮廓的底侧420的照片),并且还可使用来自远程传感器、数据库494、手持装置428、运输装置427和/或计算系统498中的一个或多个的信息来确定产品415的特性。可编程逻辑可例如提供产品415或产品的一部分(例如,背侧420)的估计的剩余磨损寿命,并且提供对产品415将丢失、受损或导致产率降低或土工设备损坏的可能性的估计。可编程逻辑还可例如提供以下警示:产品415可接受继续使用,或产品415应被更换。
[0099]
在另一示例中,监测冲击,并且可编程逻辑可确定应予以调查的非预期或超出预定限制的活动。例如,大部分冲击仅波及某一特定方向的一侧。预测建模、机器学习或这两者可指示此类冲击可能潜在地损坏地面接合产品以及可能发生所述损坏的地方。可通过在编程中创建的警示来分派工具425,以集中关注根据冲击数据预测的损坏可能在的区域。工具425可在操作者的请求下或通过人工智能分派。
[0100]
作为一个示例,图13是根据本公开的一个示例的用于确定耐磨零件或地面接合产品的下侧的磨损的方法或过程或程序500。收集的信息可用于确定磨损寿命,或可与其它信息(例如,耐磨零件的其它侧)一起用以创建整个耐磨零件的磨损轮廓。过程500可在部署在计算系统198中的软件应用程序、模块、部件或其它此类编程元素的上下文中用程序指令加以实施。程序指令引导一个或多个底层物理或虚拟计算系统如下操作,附带参考图13中的步骤。
[0101]
首先,给定监测工具25确定土方移动设备1是否在移动(步骤501)。如果未移动,则工具25可确定是否存在任何人接近信标50和/或其它机器信标是否在预定距离内。如果不存在和/或土方移动设备未移动,则工具25移动以极为接近附接到土工设备的耐磨零件76,以捕捉与耐磨零件76的背部或下侧相关的信息(步骤503)。从此位置捕捉数据(步骤505)。数据可实时呈现或保存到存储器以供进一步分析。此类信息可包含以下方面:具有铲斗的土方移动设备、尖顶15的底部表面26的状况和/或磨损轮廓、护罩9的底部表面、基部13的底部表面30、转接器11的底部表面,和/或唇缘5的底部表面33。磨损轮廓可以是2d轮廓或3d轮廓,并且可用于与存储在数据库494或其它存储器中的已知磨损轮廓进行比较。捕捉的数据202可在形式上捕捉,然后转换成3d点云或3d轮廓,或最初可捕捉为点云表示41。数据202可被发送到远离监测工具25的计算系统198,或监测工具25上的计算系统198。
[0102]
如果土工设备在移动,则工具25将收集土工设备或至少其移动部分的位置数据
(步骤507)。位置数据可从所述区域中、土工机器上、土工机器的耐磨部件上的其它信息收集装置或从工具25自身获得。在一个示例中,所述信息收集装置可以是运输装置27、手持装置28、数据库194或其它远程装置中的任一者,其可包含例如gps传感器的位置传感器以辅助确定土工设备或例如铲斗3等耐磨产品76的位置。此步骤还可包含收集待具体监测的地面接合产品或其部分的位置的位置数据。移动装置36可能已被警示或标记以监测地面接合产品上的特定位置。
[0103]
接下来,工具25或计算系统198可具有可编程逻辑,其计算障碍物避让系统在环境中的障碍物周围的受保护区域和/或路径(步骤509)。在一个示例中,可编程逻辑装置可基于土工设备的重复性质和铲斗的已知几何结构和/或定向、挖掘设备、运输车辆和手持装置的已知几何结构和/或定向和/或预测定向来利用远程装置,使得即使在铲斗3移动时,工具25也可进入受保护区域。在另一示例中,工具25和/或计算系统198可从与机器相关联的发送器接收与土工设备的操作有关的信号。以此方式,工具25可对关于地面接合产品何时将定向为预定方式(例如,向上定向使得下侧可见)的模式化间隔进行定时。一旦计算出路径,工具25就可沿着所述路径移动到极为接近(步骤511)并捕捉数据(步骤505)。例如,工具25可沿着计算出的路径移动到适当位置,以基于预测的行为来捕捉期望定向。
[0104]
可编程逻辑考虑了如图13中所示的人接近装置50的位置,因此工具25可审查或确定人接近装置50的位置(步骤513)。如果没有信标50在确定的受保护区域的预定距离内,则工具将移动到受保护区域(步骤511)并捕捉数据(步骤505)。如果计算出的受保护区域内存在人接近信标,则可编程逻辑将需要重新计算或更新受保护路径以避开人接近信标50(步骤515)。某些安全规则,例如人接近装置50的安全半径,可包含在对受保护区域和/或路径的计算中。应理解,取决于障碍物(例如,远程装置)的移动,受保护区域可能必须动态改变。预防半径可针对每个障碍物(例如,远程装置)预定,或可设置为单个唯一值(例如,5英尺半径)。在一个实施方案中,由于远程装置的不稳定性质,监测工具25可能必须放弃计算出的受保护区域或路径。在这种情况下,监测工具25可在计算第二受保护区域之前等待预定时间量(例如,1分钟)。人且因此人接近装置50的行为可能不稳定,因此即使在移动到受保护区域内的期间也可进行信标50的检查。
[0105]
工具425和/或计算系统498可使用工具425或系统439的可编程逻辑来处理来自至少一个传感器431的信息(例如,用以创建3d轮廓的底侧420的照片),并且还可使用来自远程传感器、数据库494、手持装置428、运输装置427和/或计算系统498的信息来确定产品415的特性(步骤505)。可编程逻辑可例如提供产品415或产品的一部分(例如,背侧420)的估计的剩余磨损寿命,并且提供对产品415将丢失、受损或导致产率降低或土工设备损坏的可能性的估计。可编程逻辑还可例如提供以下警示:产品415可接受继续使用,或产品415应被更换。
[0106]
图14示出根据本公开的一个示例的用于监测装载卡车601的卡车托盘603的负载、裂纹和/或变形的系统639的另一示例。系统639可包含装载或倾倒卡车601,所述装载或倾倒卡车具有卡车托盘603、通信网络40,以及监测工具或监测系统或监测装置625。卡车601类似地参考图1a和7的土工设备1b和图1的土工设备1。卡车603具有远程装置、信标637e和/或某种组合。卡车601包含卡车托盘603。卡车托盘603可携载负载624(以幻线示出)。卡车托盘603可进一步包含滑道和其它耐磨零件。卡车603、卡车托盘上的远程装置以及工具25各
自通过通信网络640通信。工具625定位成与装载卡车603分离(例如,在上方飞行),并且使用至少一个电子传感器631生成例如三维轮廓。
[0107]
在一个示例中,监测工具625可提供用于对操作的特性进行实时测评的数据。传感器631可生成表示受监测的卡车托盘603的外表面的二维或三维点云。一旦生成点云,就可例如通过测量侧壁614c的距离和角度和/或与先前测量值进行比较来确定变形,如上文所解释。一旦变形角度达到预定值(例如3度),就可发出警示以维修卡车托盘603。
[0108]
在一个示例中,2d或3d表示在此示例中可作为卡车托盘603的点云表示而获得,但监测所述系统的其它方式也是可能的。在此示例中,例如可通过测量距离、宽度和深度和/或与先前测量值进行比较来标识和监测裂纹,如上文所解释。如同变形检测,可在卡车托盘603中的裂纹起始时发出警示。
[0109]
在一个替代方案中,工具625可在不中断装载卡车601的操作的情况下监测卡车601内(例如,在卡车车斗603上)的负载624。监测卡车601的负载624允许土工设备的操作者知晓所述土工设备何时已达到完全均匀分布的负载,使得操作者不会使卡车601负载过轻或过重并且可能损坏土工设备的产品或其它部件。同样重要的是,操作者不会持续使土工设备负载过轻而使得产出次佳。
[0110]
另外,监测工具625可在挖掘循环期间捕捉机器、动臂、斗杆、铲斗和土堆(bank)的位置。一个替代版本包含同时监测铲斗中的负载和从铲斗接收材料的料斗或卡车托盘603中的负载和/或铲斗和/或卡车托盘603的特性。例如,传感器631可单独地或结合来自数据库或远程装置637e的数据602生成数据,以确定例如铲斗或卡车车体603内的负载。系统639可生成铲斗或卡车托盘603内的负载624的二维或三维轮廓。
[0111]
在另一替代方案中,工具625可监测收集在正填装的铲斗和卡车托盘603中的负载,以向操作者提供关于更高效地填装卡车托盘603的信息。此信息可用于帮助优化/验证产品设计,以及为客户优化/验证产品性能。作为效率的示例,所述系统可能指示等待的拖运卡车在铲斗仅部分(例如,一半)填装的情况下将完全填满。以此方式,系统可增大操作的效率和产出。实时测评可以其它方式使用,以例如优化挖掘路径、安排维护、估计产出、操作者绩效(例如,填装速率、挖掘循环时间、过度应力时间周期、负载循环时间、材料损失率)等。
[0112]
在另一示例中,工具625、计算系统、远程装置、手持装置和/或移动装置上的处理器可装配成处理来自至少一个传感器631的信息,并且可另外使用来自远程装置、手持装置、移动装置和/或数据库的信息以确定例如已填装土工设备的次数、填装土工设备所要的平均时间、土工设备的填装速率、土工设备内的体积和/或加载过程的有效性。在一个替代方案中,所述系统可使用来自工具625的密度和/或体积数据以及来自拖运卡车液压缸的负载数据来确定由拖运卡车603承载的负载624。
[0113]
工具625还可使用处理器的程序、计算机指令或可编程逻辑来确定负载的数目、负载之间的循环时间、土工设备的填装速率和/或土工设备的装载的有效性。工具625还可提供经受实时处理的数据以辅助例如卡车托盘603的均匀分布和完全装载。例如,系统639可向操作者提供关于要收集(例如,半铲斗)以完全填装等待的拖运卡车603的负载的信息。
[0114]
工具625可使用可编程逻辑基于例如负载624的二维或三维轮廓来确定土工设备内的土料的量。工具625还可基于(例如,从轮廓确定的)体积、材料(例如,通过挖掘或通过
破碎)的碎片化程度和/或材料类型来确定卡车601内的负载624的估计重量。工具625还可通过将估计重量与来自安装在土工设备上的负载监测单元的表明重量进行比较来验证负载624的估计重量。材料的碎片化程度可由工具625确定,或可由远离工具625的装置637e确定。挖掘的材料类型或材料浓度可由工具625、装置637e确定,或工具625可参考具有所述信息的数据库。
[0115]
图15是示出根据上文所描述的各种示例的表示用于监测的计算系统701的系统化的示例机器的示意性系统图。计算系统701的示例包含但不限于服务器计算机、网络服务器、云计算平台和数据中心设备,以及任何其它类型的物理或虚拟服务器机器、容器和其任何变型或组合。计算系统701可实施为单个设备、系统或装置,或可作为多个设备、系统或装置以分布式方式实施。从接收的信息和/或数据可由处理系统702处理,所述处理系统可以是工具、土工设备、手持装置、移动装置、计算系统和/或远程装置的部分。计算系统701包含但不限于处理系统702、存储系统703、软件705、通信接口系统707和用户接口系统709(任选)。处理系统702以操作方式与存储系统703、通信接口系统707和用户接口系统709耦合。
[0116]
计算系统701可采用中央处理单元(cpu)或处理器来处理信息。处理系统702可在单个处理装置内实施,但也可分布在协作执行程序指令的多个处理装置或子系统上。处理系统702的示例包含可编程通用中央处理单元、专用微处理器、可编程控制器、图形处理单元、嵌入式部件、专用处理器和可编程逻辑装置以及任何其它类型的处理装置、其组合或变型。处理系统702可促进协处理器装置之间的通信。处理系统702可实施在分布式计算环境中,其中通过远程处理装置执行任务或模块,所述远程处理装置通过例如局域网(“lan”)、广域网(“wan”)、互联网等通信网络链接。在分布式计算环境中,程序模块或子例程可以位于本地存储器存储装置和远程存储器存储装置两者中。可以采用分布式计算来加载平衡和/或聚合资源以进行处理。在一个实施方案中,系统701的处理系统702或其它元件可以操作方式与设备控制单元(ecu)耦合或者是设备控制单元。在另一实施方案中,处理系统702可加速对请求或数据的加密和解密。
[0117]
处理系统702可包括从存储系统703中检索计算机指令、程序、应用和/或软件705并且予以执行的微处理器和其它电路系统。处理系统702响应于用户和/或系统生成的请求而执行程序部件。这些程序部件中的一个或多个可用软件、硬件或硬件和软件705两者加以实施。处理系统702可传送指令(例如操作和数据指令)以实现各种操作。
[0118]
通信接口系统707可包含允许通过通信网络与其它计算系统进行通信的通信连接和装置。例如,通信接口系统707可与网络40通信。
[0119]
一起允许实现系统间通信的连接和装置的示例可包含网络接口卡、天线、功率放大器、rf电路系统、收发器和其它通信电路系统。通信接口系统707可使用各种有线和无线连接协议,例如直接连接、以太网、例如ieee 802.11a-x的无线连接、miracast等。连接和装置可通过用以与其它计算系统或系统网络交换通信内容的通信介质通信,所述通信介质例如金属、玻璃、空气或任何其它合适的通信介质。上述介质、连接和装置众所周知,此处无需详细论述。
[0120]
通信接口系统707可包含防火墙,在一些实施方案中,防火墙可控管和/或管理访问/代理计算机网络中的数据的权限,并且跟踪不同机器和/或应用之间的不同信任级别。防火墙可以是具有能够在一组特定机器与应用、机器与机器和/或应用与应用之间实施一
组预定访问权限的硬件和/或软件部件的任何组合的任何数量的模块,例如,以调节在这些变化实体之间的业务和资源共享的流程。例如,在防火墙的功能中执行或包含的其它网络安全功能可以是例如但不限于入侵预防、入侵检测、下一代防火墙、个人防火墙等,而不偏离本公开的新颖技术。
[0121]
用户接口系统709使用例如用于处理音频、数据、视频界面、无线收发器等协议(例如,ieee 1394a-b、串行、通用串行总线(usb)、数字视觉接口(dvi)、802.11a/b/g/n/x、蜂窝等)的协议来促进用户输入装置、外围装置和/或其类似者与计算系统701的部件之间的通信。
[0122]
用户输入装置可包含读卡器、指纹读取器、操纵杆、键盘、麦克风、鼠标、遥控器、视网膜读取器、触摸屏、传感器和/或其类似者。外围装置可包含天线、音频装置(例如,麦克风、扬声器等)、相机、外部处理器、显示器、通信装置、射频标识符(rfid)、扫描器、打印机、存储装置、收发器和/或类似物。作为示例,用户接口709可接收数据并将数据格式化以显示在显示器上。
[0123]
用户输入装置和外围装置可连接到用户接口709以及可能其它接口、总线和/或部件。此外,用户输入装置、外围装置、协处理器装置等可通过用户接口系统709连接到系统总线。系统总线可连接到例如处理系统702、用户接口系统709、通信接口系统707、存储系统705等数个接口适配器。
[0124]
存储装置1390可采用任何数目的磁盘驱动器、光盘驱动器、固态存储器装置和其它存储介质。存储系统703可包含以用于存储计算机可读指令、数据结构、程序模块或其它数据等信息的任何方法或技术实施的易失性和非易失性、可移除和不可移除介质。存储介质的示例包含有形非暂时性存储装置或系统,诸如固定或可移除随机存取存储器(ram)、只读存储器(rom)、磁盘、光盘、闪速存储器、虚拟存储器和非虚拟存储器、磁盒、磁带、固态存储器装置、磁盘存储装置或其它磁存储装置,或任何其它合适的处理器可读存储介质。计算机可读存储介质决不是传播信号。存储系统703可采用各种形式的存储器,包含片上cpu存储器(例如,寄存器)、ram、rom和存储装置。存储系统703可与例如存储装置、数据库、可移除盘装置等许多存储装置通信。存储系统703可使用例如串行高级技术附件(sata)、ieee 1394、以太网、光纤、通用串行总线(usb)等各种连接协议。
[0125]
除了计算机可读存储介质之外,在一些实施方案中,存储系统703还可包含可用来在内部或在外部传送软件705中的至少一些的计算机可读通信介质。存储系统703可实施为单个存储装置,而且还可跨相对于彼此处于相同位置或为分布式的多个存储装置或子系统实施。存储系统703可包括能够与处理系统702或可能其它系统进行通信的额外元件,例如控制器。
[0126]
所述存储系统可以是数据库194或数据库部件,其可存储由处理器执行以处理所存储的数据的程序。数据库部件可以相关的可扩展并且安全的数据库194的形式实施。此类数据库194的示例包含db2、mysql、oracle、sybase等。或者,可使用例如数组、散列、列表、堆栈、结构化文本文件(例如,xml)、表和/或其类似者的各种标准数据结构来实施数据库194。此类数据结构可以被存储在存储器中和/或在结构化文件中。
[0127]
计算机可执行指令和数据可以被存储在可由处理器访问的存储器(例如,寄存器、高速缓冲存储器、随机存取存储器、闪存等)中。这些存储的指令代码(例如,程序)可以接合
处理器部件、母板和/或其它系统部件以执行期望的操作。存储在存储器中的计算机可执行指令可包含具有一个或多个程序模块的交互式人机接口或平台,所述程序模块诸如执行特定任务或者实现特定抽象数据类型的例程、程序、对象、部件、数据结构等。例如,存储器可以包含操作系统(os)、模块、进程和其它部件、数据库表等。可以从存储装置,包含从可通过接口总线访问的外部存储装置存储和访问这些模块/部件。
[0128]
软件705(包含云点过程711、特性过程713、传感器移动过程715、工具移动过程717、负载确定过程719和障碍物避让过程721)可在程序指令中实施,并且在其它功能当中当由处理系统702执行时可引导处理系统702如关于本文示出的各种操作情境、序列和过程所描述的那样操作。例如,软件705可包含用于实施重定向过程以重定向如本文中所描述的分组业务的程序指令。
[0129]
特别地,程序指令可包含合作或以其它方式交互以执行本文描述的各种过程和操作场景的各种部件或模块。可以在编译或解释指令中或者在指令的某个其它变化或组合中体现各种部件或模块。可以同步或异步方式、串行地或并行地、在单线程环境或多线程环境中、或者依照其任何其它合适的执行范例、变化或组合执行各种部件或模块。软件705可包含额外过程、程序或部件,例如操作系统软件、虚拟化软件或其它应用软件。软件705还可包括可由处理系统702执行的固件或某一其它形式的机器可读处理指令。
[0130]
通常,软件705可在被加载到处理系统702中并执行时将(计算系统701表示的)合适的设备、系统或装置总体从通用计算系统变换成被定制以提供分组重定向的专用计算系统。实际上,在存储系统703上编码软件705可变换存储系统703的物理结构。例如,如果计算机可读存储介质实施为基于半导体的存储器,则软件705可在程序指令编码到其中时例如通过变换构成半导体存储器的晶体管、电容器或其它离散电路元件的状态来变换半导体存储器的物理状态。可以相对于磁性介质或光学介质发生类似的变换。物理介质的其它变换在不偏离本说明书的范围的情况下是可能的,其中上述示例被仅提供来促进本讨论。
[0131]
云点过程711用于处理从电子传感器31生成的信息,所述电子传感器例如捕捉数据并转换成受监测的产品和/或负载的二维或三维轮廓,或最初捕捉二维或三维轮廓作为数据。云点过程711可从传感器或其它装置接收数据以生成云点表示。取决于用于生成例如轮廓的传感器31的类型,可编程逻辑可以是autodesk出售的名为recap的软件、photomodeler出售的名为photomodeler scanner的软件、acute 3d出售的名为smart3dcapture的软件、agisoft出售的名为photoscan的软件、trimble出售的名为business center的软件、cloudcompare的软件、meshlab的软件、lastools的软件、itseez3d的软件,和/或已知用于处理三维点云数据的各种软件。
[0132]
云点过程711可将产品的表示添加到磨损轮廓数据库。在其它示例中,可使用单独的过程将表示添加到磨损轮廓数据库。先前或确立的磨损轮廓可以是新产品的cad模型或其它轮廓,或可以是先前记录的产品轮廓。先前确立的磨损轮廓可存储在运输装置27上、工具25上或远程装置上的数据库等存储系统703中。以此方式,能够利用在各种土工设备(不论制造商如何)上使用的各种产品的各种磨损轮廓来填充磨损轮廓数据库。云点过程711可在监测装置和/或呈例如远离监测工具25和/或在其内的计算系统701的形式的远程装置上使用。
[0133]
除了例如三维点云表示的云点过程711之外,特性过程713可确定如下事项:材料
浓度、材料的类型或组成、裂纹标识、产品的身份、产品的存在与否、当前磨损轮廓、估计的剩余磨损寿命、标识丢失风险、变形标识和/或向操作者提供警示。特性过程713可例如能够将当前磨损轮廓或当前风险指标与数据库中先前确立的磨损轮廓、风险指标和/或钻头部分长度进行比较,以确定估计的剩余磨损寿命、产品是否已与土工设备分离,或标识产品在近期可能丢失或受损的风险。
[0134]
特性过程713还可将当前(例如,底侧或下侧的)磨损轮廓与含有产品的最小底侧磨损轮廓的数据库进行比较。基于产品的已知最小磨损轮廓、当前磨损轮廓和/或先前确立的磨损轮廓,特性过程713可确定产品的剩余寿命。同样,特性过程713可将先前确立的裂纹或变形与当前表示进行比较,以(例如,通过角度α、l1、d1、w1、l2等测量值)更好地确立产品的寿命,如上文所论述。
[0135]
除了与产品的磨损轮廓或矿石轮廓的相关的数据之外,特性过程713可接收与例如产品已使用多长时间、产品已经历多少挖掘循环和/或矿场地质情况相关的信息以预测产品的剩余磨损寿命。特性过程713可将估计的剩余磨损寿命提供为时间单位、移动的材料的剩余单位或提供为挖掘循环单位。特性过程713可产生特定产品即将需要更换的预防警示。所述警示可以是例如视觉警示、触觉反馈和/或音频警示。另外,如果轮廓指示产品已丢失或如果产品已磨损而使得其等于或小于建议的最小磨损轮廓,则特性过程713可产生警示。另外,特性过程713可提供当前缺陷的指示或未来缺陷的预测,所述缺陷可能导致产品丢失、损坏或故障,从而可能导致产率降低和/或设备停机。
[0136]
传感器移动过程715可允许操纵至少一个传感器或传感器31。这可通过用户接口709借助于图形用户界面(gui)或人机界面(hmi)、触摸屏或另一外围装置来实现。传感器移动过程715可具有计算机逻辑以对操纵装置29(例如,铰接受控臂、从动万向接头等)进行定向,目的是获得地面接合产品或耐磨产品或耐磨产品的底部或下侧的清晰视图。操纵装置29可受控以在装置的力学允许的任何方向上移动,例如向上、向下、一侧到一侧、滚动、缩放、回转或其它操纵方向。
[0137]
工具移动过程717可使uav 20在土工设备上方自主飞行。在另一示例中,工具移动过程717可允许操控uav 20。这可通过用户接口709借助于图形用户界面(gui)或人机界面(hmi)、触摸屏或另一外围装置来实现。工具移动过程717可允许自主起飞或着陆,并且可按设置模式飞行,之后着陆在与起飞相同的位置处或附近。工具移动过程717可自主协调以免着陆在uav 20起飞的相同地点或位置。在替代示例中,工具移动过程717可控制uav 20自主地飞到用于监测土工设备的新位置,而不需要单独的运输车辆27将工具25移动到各处。工具移动过程717可辨识出土工设备已经落下并且地面接合产品以特定方式(例如,以提供针对底部或下侧的清晰瞄准线的方式)定向,并且将飞向所述土工设备。
[0138]
负载确定过程719可监测铲斗或卡车托盘等地面接合产品中的材料量。在一个示例中,负载确定过程719可通过使用云点过程711或具有类似过程的过程生成例如负载的二维或三维轮廓来确定收集的材料的量。作为示例,负载确定过程719可基于矿场地质情况、材料的碎片化程度和/或土工设备内的材料的体积等事项提供负载的近似重量。在其它示例中,负载确定过程719可从土工设备上的远程装置接收信息,以例如验证土工设备内的负载的重量。
[0139]
在替代方案中,负载确定过程719可例如生成例如铲斗或卡车托盘中的负载的二
维或三维轮廓,确定收集的材料的量,存储结果,重复过程以历史跟踪负载,分析历史数据以确定例如土工产品的填装速率、负载之间的循环时间、填装循环的数目和/或土工设备的有效性和/或产出等事项。
[0140]
当地面接合产品的表面受阻挡而从传感器或工具不可见时,可利用障碍物避让过程721。这种情况在容纳地面接合工具的土工设备移动时变得更加复杂。障碍物避让过程721将从区域中的其它信息收集装置收集信息以确定地面接合产品和土方移动设备的定向。这些信息收集装置可以是运输装置27、手持装置28、数据库194和/或远程装置中的任一者,其可包含例如gps传感器的位置传感器以辅助确定土工设备或铲斗3等耐磨产品76的位置。
[0141]
障碍物避让过程721可计算受保护区域和/或行进路径,以供工具在土工设备和地面接合产品周围移动。所述计算基于地面接合产品的已知几何结构和/或定向和/或模式以及土工设备的已知几何结构和/或定向和/或预测模式或定向。障碍物避让过程721将操纵工具25进入受保护区域或路径以进行测量(例如,磨损、底侧表面、裂纹等)。
[0142]
如所属领域的技术人员应了解,本发明的示例可体现为系统、方法或计算机程序产品。因此,本发明的示例可采用完全硬件实施例、完全软件实施例(包含固件、常驻软件、微码等)或组合了软件和硬件实施方案的实施例,其在本文中可全部总称为“电路”、“模块”或“系统”。此外,本发明的实施方案可呈计算机程序产品形式,所述计算机程序产品体现在其上体现有计算机可读程序代码的一个或多个计算机可读介质中。
[0143]
尽管上文论述已主要结合铲斗内的负载和铲斗上的斗齿论述了本公开,但所述工具可用于例如产生铲斗上的例如护罩、翼和/或滑道或其它土工设备附件和部件等其它产品或产品表面的二维或三维轮廓。此外,本公开的系统还可用于监测其它类型的土工设备上的产品的存在和/或状况,所述产品例如滑槽上的滑道、破碎机上的尖头、管道、阀门、卡车托盘或铲刃上的端头(end bit)。
[0144]
以上公开内容描述了用于监测特性的工具的具体示例,所述特性例如裂纹标识和测量、变形标识和测量、对土工设备的耐磨零件的底侧磨损的测量以及土工设备上的地面接合产品的状态。系统可包含本公开的不同实施方案或特征。一个示例中的特征能够与另一示例的特征一起使用。所给出的示例和所公开的特征的组合不在于在必须一起使用它们的意义上为限制性的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。