1.本公开涉及电池电动车辆牵引和用于电池电动车辆后面的拖车。
背景技术:
2.由于增加的能量消耗和热负荷,牵引对于电池电动车辆(battery-electric-vehicle,下文中称为bev)是重大挑战。例如,电动bev皮卡牵引规格约为5000磅。这低于具有最小7100磅牵引能力的等效已知汽油发动机驱动的皮卡车的牵引规格。在牵引操作期间,汽油发动机驱动的皮卡车也可以具有比bev更大的牵引范围。
3.因此,在当前的电池电动车辆在执行牵引操作时实现其预期目的的同时,需要一种用于增加电池电动车辆的牵引能力,并扩展电池电动车辆的牵引范围的新的和改进的系统和方法。
技术实现要素:
4.根据多个方面,在牵引操作期间扩展机动车辆的范围和机动性的系统包括电池电动车辆(bev),该bev具有可再充电能量存储系统(电池组)为bev提供运行能量。动力拖车可释放地连接到所述bev。推进单元设置在所述动力拖车并与所述bev通信,所述推进单元增强所述bev的发动并向所述bev提供加速辅助。
5.在本公开的另一方面,所述推进单元包括电池组,该电池组提供能量以补充车辆能量包的能量。
6.在本公开的另一方面,所述电池组配置为能量包。
7.在本公开的另一方面,所述电池组配置为动力包。
8.在本公开的另一方面,所述推进单元包括至少一个电动机,该至少一个电动机被供能以向所述动力拖车提供推进力并增强所述bev的推进力。
9.在本公开的另一方面,所述至少一个电动机仅由所述bev的车辆能量包供能。
10.在本公开的另一方面,所述至少一个电动机限定定位在所述动力拖车的第一轮毂中的第一电动机,和定位在所述动力拖车、与所述第一轮毂相对定位的第二轮毂中的第二电动机。
11.在本公开的另一个方面,所述推进单元包括电池组和由从所述电池组传送的能量提供动力的至少一个电动机,该至少一个电动机被供能以向所述动力拖车提供动力。
12.在本公开的另一方面,所述至少一个电动机限定第一电动机和与所述第一电动机相对定位的第二电动机。拖车模块设置在所述动力拖车,所述拖车模块在所述动力拖车和所述bev之间通信,并与所述第一电动机和所述第二电动机通信。
13.在本公开的另一方面,所述拖车模块控制所述第一电动机的第一速度,该第一速度不同于所述第二电动机的第二速度,以增强所述动力拖车的机动性。
14.根据多个方面,一种在牵引操作期间扩展机动车辆的牵引范围和机动性的系统包括电池电动车辆(bev),该bev具有车辆能量包为bev提供运行能量。动力拖车可释放地连接
到所述bev。拖车模块设置在所述动力拖车,所述拖车模块在所述动力拖车和所述bev之间通信。推进单元设置在所述动力拖车,且与所述拖车模块通信并使用所述拖车模块与所述bev通信。所述推进单元增强所述bev的发动,并为所述bev提供加速辅助。
15.在本公开的另一方面,所述推进单元配置为第一电动机和第二电动机,所述第二电动机相对于所述第一电动机相对地定位在所述动力拖车周围。
16.在本公开的另一方面,所述推进单元包括电池组,该电池组提供能量,以补充所述车辆能量包的能量;并且所述第一电动机和所述第二电动机由所述电池组供能,以向所述动力拖车提供推进力。
17.在本公开的另一方面,所述推进单元配置为至少一个电动机,该至少一个电动机连接到被牵引拖车的至少一个轴并使其旋转,该至少一个电动机由所述电池组供能,以向所述动力拖车提供推进力。
18.在本公开的另一方面,拖车模块设置在所述动力拖车,所述拖车模块在所述动力拖车和所述bev之间通信,并与所述推进单元通信。
19.在本公开的另一方面,车辆模块设置在所述bev,其中,在所述bev对所述动力拖车的牵引操作期间,所述动力拖车利用推进单元的操作机械地和电气地连接到bev,且所述车辆能量包连接到所述车辆模块并受所述车辆模块控制。
20.在本公开的另一方面,通信链路将所述bev连接到所述动力拖车,以传送能量并提供所述bev和所述动力拖车之间的通信路径。
21.根据多个方面,一种在牵引操作期间扩展机动车辆的牵引范围和机动性的方法包括:将可再充电车辆能量包定位在电池电动车辆(bev)中以向所述bev提供运行能量;将动力拖车可释放地连接到所述bev;设置拖车模块在所述动力拖车,所述拖车模块在所述动力拖车和所述bev之间通信;连接定位在所述动力拖车上的推进单元,通过所述拖车模块与所述bev通信;以及通过来自所述拖车模块的命令为所述推进单元供能,以增强所述bev的发动并为所述bev提供加速辅助。
22.在本公开的另一方面,所述方法还包括:命令所述推进单元的第一电动机和所述推进单元的第二电动机的运行;以及使用通信链路将所述bev连接到所述动力拖车。
23.在本公开的另一方面,所述方法还包括通过在所述bev和所述动力拖车之间分配扭矩减少所述bev上的热负荷,从而提高总系统效率。
24.从本文提供的描述中,可应用的其他领域将变得显而易见。应当理解,描述和具体示例仅旨在用于说明的目的,而不旨在限制本公开的范围。
附图说明
25.本文中所描述的附图仅用于说明目的而不旨在以任何方式限制本发明的范围。
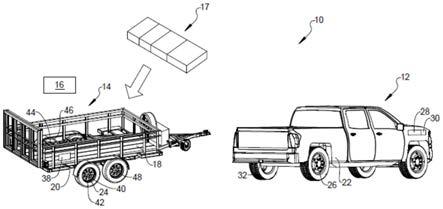
26.图1是根据示例性方面的电池电动车辆和动力拖车的侧面透视图;
27.图2是具有用于推进图1的动力拖车的电动机的车轮的侧面透视图;以及
28.图3是提供比较电动机气隙转矩的电动机负荷数据点与图1系统运行时电动机轴速度的曲线图。
具体实施方式
29.以下描述本质上仅仅是示例性的,并不旨在限制本公开、应用或使用。
30.参照图1,用于扩展电池电动车辆(bev)和动力拖车10的范围和机动性的系统和方法包括可释放地连接到动力拖车14的bev 12。根据多个方面,bev 12限定皮卡车,然而bev12不限于一种车辆类型,并且因此可以限定任何机动车辆,包括但不限于客车、运动型多用途车(suv)、货车、小型货车等。为了增强bev 12的运行范围和功能,动力拖车14设置有推进单元16。根据多个方面,推进单元16可配置为电池组17,其可为能量包或动力包。根据多个方面,推进单元16可配置为至少一个电动机34,并且根据多个方面,可配置为在下面参照图2描述的、提供动力的两个或更多个电动机34,以推进动力拖车14。根据其他方面,推进单元16包括电池组17和至少一个电动机34。
31.当推进单元16包含电池组17时,电池组17可包括电池组阵列中的一个或多个电池。电池组17可以配置为具有多个电池单元的能量包,所述多个电池单元在延长的时间段内递送稳定的电源。电池组17还可以配置为动力包,所述动力包能够在比所述能量包短的持续时间内递送比所述能量包更高的动力。根据多个方面,电池组17可位于动力拖车14的底座或平台18下方,例如存储在位于平台18下方的壳体20内,或者电池组17可支撑在平台18上或平台18上方。
32.电池组17是可再充电的,并且可以在为bev 12提供运行能量的车辆能量组22的再充电操作期间,被同时再充电。电池组17也可以独立于bev 12再充电,这允许在动力拖车14的存储位置处或在动力拖车14从bev 12脱离的情况下再充电。
33.动力拖车14设置有至少两个车轮24,所述至少两个车轮24中的至少一个定位在动力拖车14的相对侧上,以提供平台18的平衡支撑。如已知的,bev 12类似地设置有至少四个车轮26,其中至少一个车轮26限定从动轮。根据多个方面,电池组17的能量可传递到车辆能量包22,从而可传递到为bev 12提供推进动力的一个或多个电动机。
34.在牵引操作期间,动力拖车14在推进单元16运行的情况下与bev 12进行机械和电气连接,并且车辆能量包22连接到车辆模块28并由车辆模块28控制。根据多个方面,车辆模块28可包括一个或多个处理器,其在示例性方面是驻留在车辆模块28中的微处理器。示例性方面中的处理器还可驻留在独立于车辆模块28的计算机中,或驻留在云中。处理器可以执行分布式或并行处理协议,并且可以包括例如专用集成电路、包括现场可编程门阵列的可编程门阵列、数字信号处理器或前端处理器。处理器还可以包括或访问存储在存储器30中的信息,处理器单独可操作地与存储器30耦合。存储器被理解为能够临时存储信息的物理设备,例如随机存取存储器,或者能够永久存储信息的物理设备,例如只读存储器。代表性的物理设备包括硬盘驱动器、固态驱动器、光盘或可通过网络上的云访问的存储器。
35.车辆模块28提供bev 12和动力拖车14之间的通信。根据多个方面,车辆模块28还可与远离bev 12的通信中心(例如基于云的通信中心)通信。车辆模块28允许监测能量分析和第一bev 12和动力拖车14之间能量传递的控制。为了传递能量并提供通信路径,通信链路32将bev 12连接到动力拖车14。
36.参照图2并再次参照图1,根据多个方面,动力拖车14的至少两个车轮24中的至少一个包括可包含在轮毂36内的至少一个电动机34。根据其他方面,动力拖车14的至少两个车轮24的单独车轮包括至少一个电动机34中的一个,使得至少两个车轮24的单独车轮限定
动力车轮。根据多个方面,至少一个电动机34被提供有来自电池组17的电能。根据多个方面,还可以用来自bev 12的车辆能量包22的能量,补充用于动力拖车14的至少一个电动机34的动力运行的能量,或者可以由电池组17和车辆能量包22提供能量。
37.使用至少一个电动机34中的一个或多个以直接推进动力拖车14的至少两个车轮24中的任何车轮,这允许动力拖车14为动力拖车14和bev 12提供加速能力。至少一个电动机34的单独或串联运行还提高了动力拖车14和bev 12在向前或驱动方向,以及在向后或反向方向上的机动性。
38.继续参照图1和图2,根据多个方面,动力拖车14的至少一个电动机34也可以使用来自电池组17的能量以在动力拖车14与bev 12分离的情况下运行,这促进了定位动力拖车14以存储和操纵动力拖车14继而连接到bev 12的容易性。还可以设置与动力拖车14一起的附接设备,所述附接设备允许动力拖车14自动连接到bev 12。根据多个方面,拖车模块38可设置在动力拖车14上,其功能类似于车辆模块28并可与车辆模块28通信。拖车模块38也可以独立于车辆模块28运行。拖车模块38在动力拖车14的至少一个电动机34的运行期间(包括在至少一个电动机34的独立运行期间)辅助,并且可在能量传递期间辅助并用于电池组17的再充电操作。类似于车辆模块28,拖车模块38提供bev 12和动力拖车14之间的通信。根据多个方面,拖车模块38还可与远离动力拖车14的通信中心(例如基于云的通信中心)通信。车辆模块28还提供监测能量分析以及对第一bev 12和动力拖车14之间能量传递的控制。
39.根据多个方面并继续参照图1和图2,至少一个电动机34限定了定位在动力拖车14的第一轮毂42中的第一电动机40,和定位在动力拖车14的第二轮毂46中的第二电动机44。第一电动机40和第一轮毂42定位成与第二电动机44和第二轮毂46相对,以平衡递送到动力拖车14的推进动力。根据另外的方面,上述的至少一个电动机34不限于连接至轮毂36,而是可以替代地连接至被牵引拖车14的至少一个轴48并且使其旋转(例如使用公知的差速器)。在动力拖车14的向前运行期间,特别是在反向运行期间,选择性地运行至少一个电动机34(特别是通过以与第二电动机44不同的速度运行第一电动机40)提高了动力拖车的可操纵性。
40.参照下面的表1,并再次参照图1,动力拖车14可以以四种方式配置,以提供单独的益处子集。
41.表1:
[0042][0043]
定义配置a的第一配置增加了动力拖车14的牵引能力,同时依赖于bev 12的车辆能量包22的能量存储能力。配置a提供至少一个电动机34中的一个或多个,以向至少一个车轮24中的至少一个车轮提供动力,其中至少一个电动机34从bev 12的车辆能量包22汲取运行动力。提供至少一个电动机34改善了拖车操纵,并且通过将电池组17从动力拖车14去除而降低了拖车成本。
[0044]
定义配置b的第二配置传递了本公开的所有益处。配置b包括至少一个电动机34,该至少一个电动机34向动力拖车14提供推进动力,并且使用动力包作为电池组17而提供能量,用于运行至少一个电动机34和用于补充bev 12的车辆能量包22的能量。利用配置b提高了bev 12和动力拖车14的运行范围,同时提高了牵引能力和拖车处理能力。减少了配置b的成本,因为代替能量包的动力包的成本较低并且抵消了至少一个电动机34的成本。
[0045]
定义配置c的第三配置提供了配置b的益处,并且进一步提供了附加范围和附加成本。配置c包括提供最大范围优势、作为电池组17的能量包。配置c的牵引能力被认为是中性益处,因为至少一个电动机34和作为电池组17的能量包的重量增加了动力拖车14的质量。与没有自动力的拖车相比,配置c的操纵能力是一种改进。配置c的成本被认为是三种配置中最高的。
[0046]
参照图3并再次参照图1和图2,曲线图50提供了以nm为单位的电动机气隙转矩52的电动机负荷数据点,以及以rpm为单位的电动机轴转速54。第一区域56包括表示将推进扭矩转移到动力拖车14是如何减少bev 12上的电动机负荷的数据点,其中消除了参考线58上方的点。减小电动机负荷提高了效率,并降低了bev 12的车辆能量包22上的热负荷。第二区域60提供识别动力拖车14的再生制动效果的数据点。当来自bev 12的再生制动充电能力降低或丧失时,与具有上文参照表1所标识的配置b或配置c的动力拖车14一起使用的再生制动改善了城市行驶范围。由bev 12提供的再生制动在低于大约10公里每小时车辆速度下逐渐减小,而在低于10公里每小时拖车速度下连续下降到零行驶速度时,来自动力拖车14的再生制动充电能力完全可用。
[0047]
将动力拖车14与牵引车辆组合,bev 12通过以下方式降低bev 12的热负荷:1)通过提供扭矩辅助,减少或消除bev 12车辆中推进系统的低效运行点;2)减少bev 12和动力拖车14的组合单元的排热;3)通过减少每英里的功率消耗,增加总体系统效率,从而扩大范围;4)动力拖车14补充牵引车辆(bev 12)的牵引能力,并且bev 12在其热极限内运行,同时
牵引能力比无动力拖车获得的更高;以及5)使用再生制动,动力拖车14回收由动力拖车14吸收的一部分动能,减少用于牵引动力拖车14的能量输出。
[0048]
本公开的系统和方法还改进了牵引操作期间的以下驾驶性能项目。当牵引动力拖车14时,bev 12的加速能力通过由至少一个电动机34提供的扭矩而增加。拖车的机动性也得到了改善,特别是当提供了可单独驱动的车轮时。
[0049]
本系统包括至少一个电动机34,以给动力拖车14的车轮24提供动力或给被牵引动力拖车14的一个或多个轴48提供动力,并且可选地包括尺寸可以是模块化的电池组或能量包。该系统与诸如bev 12的主牵引车辆协同运行。
[0050]
系统的运行方法在被牵引动力拖车14和牵引车辆(bev 12)之间成比例地分配用于推进的扭矩,从而优化牵引和被牵引元件的总体组合的运行效率。当在动力拖车14的各个车轮处装备有电动机时,该系统的运行方法可通过使用车轮扭矩提高被牵引动力拖车14的机动性。在牵引车辆、bev 12和动力拖车14之间分配扭矩的方法可使用高级驾驶员辅助系统(advanced driver assistance system,adas)预测车轴或电动机扭矩请求。
[0051]
本公开的系统包含模块化可再充电能量存储系统(rechargeable energy storage system,ress),其可包括托盘中的模块化包,该托盘可与动力拖车14的底盘集成。
[0052]
本公开的系统和方法在牵引bev和动力拖车之间分配能量和扭矩。提供了一种具有(车轮)电动机或连接到车轴上的电动机的电动智能拖车和模块化可再充电能量存储系统。bev 12与牵引车辆中的主动力系通信,提供扭矩和能量管理以及拖车机动控制。由动力拖车14提供的发动辅助和加速辅助使得动力拖车14的质量较不易被bev 12的操作者看到。
[0053]
本公开的用于扩展电池电动车辆(bev)和动力拖车10的范围和机动性的系统和方法提供了多个优点。这些优点包括在牵引车辆bev 12和动力拖车14之间分配能量和扭矩。动力拖车14可以是机动智能拖车,其具有至少一个电动机34和限定电池组17的模块化可再充电能量存储系统。设置在动力拖车14和牵引bev 12中的车辆模块28之间的通信提供扭矩和能量管理以及机动控制。动力拖车14向bev 12提供发动辅助,并进一步提供加速辅助,以使动力拖车14的质量对bev 12不太明显。动力拖车14还提供用于发动和加速辅助的推进单元16,并且当电池组17存在时,提供对bev 12的电池组17和车辆能量包22的再生充电。
[0054]
本公开的描述在本质上仅仅是示例性的,并且不背离本公开的要点的变型旨在落入本公开的范围内。这样的变型不应被视为偏离本公开的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
