1.本发明涉及一种提高临界切削速度的多维超声振动加工系统及方法,主要应用于超声加工中,属于精密、超精密加工技术领域。
背景技术:
2.在常规速度下的超声加工过程中,由于切削速度通常小于超声振动速度,使工具与工件之间出现接触-分离特性,大幅改善了切削区的加工条件。与传统加工技术相比辅助精密加工技术拥有切削力小,切削温度低,表面完整性好等众多优势,在航空航天、高速列车、医疗器械和能源装备等制造领域都有广泛的应用。
3.高速切削是近些年来发展出的新型加工技术,依靠远高于普通加工的切削速度工件材料在高应变率条件下发生局部软化,实现材料高质高效去除。若能将两项技术有机结合,加工优势必定能进一步扩大。然而,当切削速度大于超声振动的瞬时最大速度时,超声加工独有的接触-分离特性将不复存在。因此,如何设计超声加工系统,并配合合理的加工工艺提高临界切削速度成为一个值得深入研究的问题。
技术实现要素:
4.本发明利用超声波在异种材料界面处的模态转换机制,借助特殊的结构设计实现工件的三维振动,并通过设计合理加工参数与刀具纵-扭复合振动有机结合,突破传统超声加工的临界切削速度限制,将临界切削速度大幅提高,在高速多维超声振动辅助加工中实现工件和刀具接触-分离特性。
5.本发明为实现上述技术目的,采用以下技术方案:一种提高临界切削速度的多维超声振动加工系统,主要包含超声波发生器,无线传输模块,纵-扭振动模块,以及三维振动平台。
6.超声波发生器具备三个输出端,分别为第一输出端,第二输出端和第三输出端,并且能够同时输出三路高频电信号,或者输出任意两路高频电信号,或者单独输出任意一路高频电信号,超声波发生器发出的三路高频电信号频率和电流可以任意调整,任意两路信号之间相位差能够任意控制。
7.纵-扭振动模块由纵振换能器驱动,纵振换能器前端装有纵-扭变幅杆,纵-扭变幅杆前端装有刀具,纵-扭变幅杆上开有螺旋槽或者斜槽能够输出纵-扭复合振动。
8.无线传输模块由上盘和下盘两部分组成,上盘与超声波发生器的第一输出端相连接,下盘与纵-扭振动模块的纵振换能器相连接。
9.三维振动平台由上基板、下基板、连接杆、中心基板、第一变幅杆、第二变幅杆、第一换能器、第二换能器和双头螺柱组成。
10.上基板采用材料1制成,材料1的纵波声速为c
l1
,横波声速为c
t1
,中心基板采用的材料2制成,材料2的纵波声速为c
l2
,横波声速为c
t2
,材料1和2的声速应满足c
l1
《c
l2
,c
t1
《c
t2
;上基板为正方形板,边长等于材料1纵波整波长,在基板的四个角分别设置四个连接孔,连
接孔中心与邻边的距离d均为材料1纵波四分之一波长。
11.上基板和下基板通过连接杆连接,上基板一组邻边的中心处设有螺纹孔,第一变幅杆和第二变幅杆通过设置在小端的螺柱与上基板连接,通过双头螺柱与第一换能器和第二换能器连接。
12.中心基板为正方形,上基板中心处开有正方形空腔,中心基板形状尺寸和正方形空腔一致,中心基板通过热装方式安装到正方形空腔内,中心基板侧边与上基板侧边之间的夹角α应满足sinα≤c
l1
/c
l2
,根据snell定理从第一变幅杆传出的超声波在传播至上基板与中心基板交界面处发生折射,因为纵波和横波波速不同出现模态分离现象,入射角等于α小于等于第一临界角,中心基板在两组纵波叠加作用下做扭转振动,中心基板在两组横波叠加作用下在上基板垂直方向振动。
13.中心基板和上基板的正方形空腔中心处均开有通孔,中心基板上表面开有相互联通的气道,工件通过真空吸附的方式固定在上基板上,以减少连接部件的数量,通过紧密贴合提高超声波传递效率。
14.纵-扭振动模块和三维振动平台的谐振频率一致,误差应控制在1%以内。
15.一种提高临界切削速度的多维超声振动加工系统的加工方法,其包含以下步骤:步骤1),将工件放置于中心基板上,工件通过真空吸附的方法固定在中心基板上;步骤2),设置第一输出端和第二输出端激励信号之间的相位差为90
°
,激励频率相等,误差应小于1%,工件在第一换能器和第二换能器的共同激励下做平面椭圆运动;设置第一输出端和第三输出端的输出信号之间相位差为0
°
,工具做纵-扭复合振动;步骤3),设置机床的切削速度vj,刀具任一切削刃上一点的扭转振动位移xd为:xd=adsin(2πfdt),其中ad和fd为刀具的扭转振幅和频率,工件上一点的扭转振动位移xg为:xg=agsin(2πfgt),其中ag和fg为刀具的扭转振幅和频率,则瞬时工件和刀具的相对速度v
x
为: v
x
=2π[adfdsin(2πfdt) a
gfg
sin(2πfgt)],当机床的切削速度vj等于最大相对速度v
x
时,工件和刀具之间不存在接触-分离过程,因此临界切削速度v
l
等于最大相对速度:v
l
=2π(adfd a
gfg
sin),由于临界切削速度v
l
远远大于传统超声加工中的临界切削速度v
t
=2πadfd或者v
t
=2πa
gfg
,设置机床的切削速度满足v
t
《vj《v
l
,即可突破传统超声加工中的临界切削速度v
t
,在高速多维超声振动辅助加工中实现工件和刀具接触-分离特性。
[0016]
本发明采用以上技术方案与现有技术相比,主要存在以下几大优势:(1)本发明利用声波在异种材料间传播时的模态转换特性,设计合理的振动平台,实现振动模态转换,避免了加工槽和孔等复杂模态转换结构,提高了振动平台的稳定性;(2)为了减少超声振动传递过程中的损失,本发明中的上基板和中心基板的装配采用热装方式,工件固定采用真空吸附方式;(3)本发明通过对超声激励信号的准确控制将刀具上的纵-扭超声振动和平台的三维超声振动有机结合,与传统超声相比提高了临界切削速度,增大了瞬时切削能量有利于难加工材料的高效切削。
附图说明
[0017]
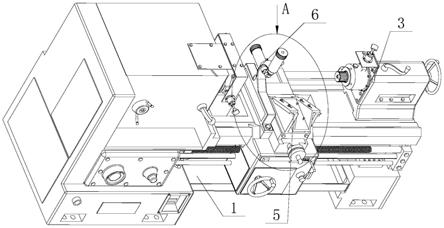
图1是本发明的结构示意图;图2是本发明中的上基板结构示意图;图3是本发明中的中心基板结构示意图。
具体实施方式
[0018]
下面结合附图对本发明的技术方案做进一步的详细说明:1-超声波发生器,2-第一输出端,3-第二输出端,4-第三输出端,5-第一换能器,6-第一变幅杆,7-第二变幅杆,8-第二换能器,9-上基板,10-连接杆,11-下基板,12-中心基板,13-工件,14-刀具,15-纵-扭变幅杆,16-纵振换能器,17-下盘,18-上盘,19-连接孔,20-螺纹孔,21-正方形空腔,22-上基板通孔,23-气道,24-中心基板通孔。
[0019]
一种提高临界切削速度的多维超声振动加工系统,包含1-超声波发生器,无线传输模块,纵-扭振动模块,以及三维振动平台。
[0020]
1-超声波发生器具备三个输出端,分别为2-第一输出端,3-第二输出端和4-第三输出端,并且能够同时输出三路高频电信号,或者输出任意两路高频电信号,或者单独输出任意一路高频电信号, 1-超声波发生器发出的三路高频电信号频率和电流可以任意调整,任意两路信号之间相位差能够任意控制。
[0021]
纵-扭振动模块由16-纵振换能器驱动,16-纵振换能器前端装有15-纵-扭变幅杆,15-纵-扭变幅杆前端装有14-刀具,15-纵-扭变幅杆上开有螺旋槽或者斜槽能够输出纵-扭复合振动。
[0022]
无线传输模块由18-上盘和17-下盘两部分组成,18-上盘固定在与1-超声波发生器的2-第一输出端相连接,17-下盘与纵-扭振动模块的16-纵振换能器相连接。
[0023]
三维振动平台由9-上基板、11-下基板、10-连接杆、12-中心基板、6-第一变幅杆、7-第二变幅杆、5-第一换能器、8-第二换能器和双头螺柱组成。
[0024]
9-上基板采用材料1制成,材料1的纵波声速为c
l1
,横波声速为c
t1
, 12-中心基板采用的材料2制成,材料2的纵波声速为c
l2
,横波声速为c
t2
,材料1和2的声速应满足c
l1
《c
l2
,c
t1
《c
t2
;9-上基板为正方形板,边长等于材料1纵波整波长,在基板的四个角分别设置四个19-连接孔,19-连接孔中心与邻边的距离d均为材料1纵波四分之一波长。
[0025]
9-上基板和11-下基板通过10-连接杆连接,9-上基板一组邻边的中心处设有20-螺纹孔, 6-第一变幅杆和7-第二变幅杆通过设置在小端的螺柱与9-上基板连接,通过双头螺柱分别与5-第一换能器和第二换能器连接。
[0026]
12-中心基板为正方形, 9-上基板中心处开有21-正方形空腔, 12-中心基板形状尺寸和21-正方形空腔一致,12-中心基板通过热装方式安装到21-正方形空腔内, 12-中心基板侧边与9-上基板侧边之间的夹角α应满足sinα≤c
l1
/c
l2
,根据snell定理从6-第一变幅杆传出的超声波在传播至9-上基板与12-中心基板交界面处发生折射,因为纵波和横波波速不同出现模态分离现象,入射角等于α小于等于第一临界角, 12-中心基板在两组纵波叠加作用下做扭转振动,12-中心基板在两组横波叠加作用下在9-上基板垂直方向振动。
[0027]
12-中心基板和9-上基板的21-正方形空腔中心处开有22-上基板通孔和24-中心基板通孔,12-中心基板上表面开有相互联通的23-气道,13-工件通过真空吸附的方式固定
在9-上基板上,以减少连接部件的数量,通过紧密贴合提高超声波传递效率。纵-扭振动模块和三维振动平台的谐振频率基本一致,误差应控制在1%以内。
[0028]
一种提高临界切削速度的多维超声振动加工系统的加工方法,包含以下步骤:步骤1),将13-工件放置于12-中心基板上,将13-工件通过真空吸附的方法固定在12-中心基板上;步骤2),设置2-第一输出端和3-第二输出端激励信号之间的相位差为90
°
,激励频率相等,误差应小于1%, 13-工件在5-第一换能器和第二换能器的共同激励下做平面椭圆运动;设置2-第一输出端和4-第三输出端的输出信号之间相位差为0
°
,工具做纵-扭复合振动;步骤3),设置机床的切削速度vj, 14-刀具任一切削刃上一点的扭转振动位移xd为:xd=adsin(2πfdt),其中ad和fd为14-刀具的扭转振幅和频率,13-工件上一点的扭转振动位移xg为:xg=agsin(2πfgt),其中ag和fg为14-刀具的扭转振幅和频率,则瞬时13-工件和14-刀具的相对速度v
x
为:v
x
=2π[adfdsin(2πfdt) a
gfg
sin(2πfgt)], 当机床的切削速度vj等于最大相对速度v
x
时, 13-工件和14-刀具之间不存在接触-分离过程,因此临界切削速度v
l
等于最大相对速度:v
l
=2π(adfd a
gfg
),由于临界切削速度v
l
远远大于传统超声加工中的临界切削速度v
t
=2πadfd或者v
t
=2πa
gfg
,设置机床的切削速度满足v
t
《vj《v
l
,然后启动机床进行切削加工,即可突破传统超声加工中的临界切削速度v
t
,在高速多维超声振动辅助加工中实现13-工件和14-刀具接触-分离特性。
[0029]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。