高处观察装置
1.本技术是申请号为201780092923.6、申请日为2017年07月12日、发明名称为“高处观察装置”的分案申请。
技术领域
2.本发明涉及一种高处观察装置,特别涉及一种使用纵长的棒状体进行高处的观察、或者使用纵长的棒状体进行来自高处的观察的高处观察装置。
背景技术:
3.例如在观察、调查住宅的屋顶、隧道的顶棚这样的高处、或为了大范围地确认道路的交通状况而从高处观察道路的情况下,在纵长的棒状体的顶部安装相机、各种传感器等观察装置而执行高处的拍摄、观测、或者来自高处的拍摄、观测。
4.在专利文献1中公开有如下观察装置,其以观察对象物为目的,使用组合直径不同的多个杆片而形成的能够伸缩的纵长的杆,在杆的顶部安装相机来执行来自高处的拍摄。
5.根据该专利文献1的观察装置,能够配合于进行观察的对象物的高度位置而使杆伸长,并利用安装于杆的顶部的相机从高处拍摄对象物。
6.现有技术文文献
7.专利文献
8.专利文献1:日本特开2017-67894公报
技术实现要素:
9.发明要解决的课题
10.根据专利文献1的观察装置,根据所拍摄的对象物的高度位置的不同,有时需要使杆从地表面伸长至几十米这样纵长的高度位置来进行对象物的拍摄。
11.因而,在使杆伸长至这种高度位置来拍摄的情况下,根据杆的直径的不同,担心杆产生挠曲进而杆摆动,因此不能在定点稳定地观察对象物。特别是,在几十米的上空,容易受到疾风、气流的影响,因此这一担忧非常显著。
12.本发明鉴于上述情况而完成,其课题在于提供一种能够稳定地进行高处的对象物的定点观测的高处观察装置。
13.用于解决课题的手段
14.用于实现上述课题的本发明的高处观察装置的特征在于,具备:立设于设置面并形成为伸缩自如的纵长的棒状体;浮力产生单元,连结于该棒状体,在连结的状态下通过浮力使所述棒状体伸缩而将该棒状体定位于希望的高度位置;保持单元,在通过该浮力产生单元定位的高度位置固定并保持所述棒状体的高度位置;以及安装于所述浮力产生单元的观察装置。
15.根据该高处观察装置,通过根据对象物的观察位置利用浮力产生单元使棒状体伸缩,使得棒状体被定位于希望的高度位置。在该高度位置,利用保持单元固定棒状体的高度
位置。
16.如此,在棒状体被定位于希望的高度位置的状态下,由于其高度位置被固定,因此即使棒状体被作用疾风、气流,也可抑制棒状体产生挠曲的情况,其结果,可抑制棒状体摆动的情况。因而,能够用观察装置稳定地进行高处的对象物的定点观测。
17.根据该高处观察装置,其特征在于,所述浮力产生单元是通过多个旋转叶片的旋转而上浮的旋转叶片机。如果浮力产生单元是旋转叶片机,则能够容易地执行棒状体的伸缩。
18.另一方面,根据该高处观察装置,其特征在于,所述浮力产生单元是通过气体而上浮的气体气球。如果浮力产生单元是气体气球,则能够用简易的构成执行棒状体的伸缩。
19.而且,其特征在于,旋转叶片机以相对于所述设置面始终成为铅垂的方式连结于所述棒状体。据此,由于旋转叶片机以相对于设置面始终成为铅垂的方式连结于棒状体,因此假设棒状体摆动,也能够在大致定点稳定地观察对象物。
20.另一方面,其特征在于,保持单元是具备卷轴和线的卷取机构,该卷轴形成为以轴中心旋转自如,该线卷绕于该卷轴,随着所述棒状体的伸长而从所述卷轴伸出,并且随着所述棒状体的收缩而卷取于所述卷轴。
21.根据这种构成,能够利用具有以轴中心形成为旋转自如的卷轴以及卷取于卷轴的线的简易构成的卷取机构来固定棒状体的高度位置。
22.并且,其特征在于,卷取机构具备施力单元,该施力单元始终向将所述线卷取于所述卷轴的方向对该卷轴施力。如此,在线向卷轴卷取时,无需进行使线卷绕于卷轴的作业,线向卷轴的卷取容易,因此可简易地实现棒状体的收缩。
23.另一方面,其特征在于,棒状体具备外侧圆筒体、以及相对于该外侧圆筒体逐渐缩小直径的多个内侧圆筒体,该各内侧圆筒体以该各内侧圆筒体的所述直径逐渐缩小的方式依次配置于所述外侧圆筒体的内侧并形成为中空状,而且,其特征在于,卷取机构的线是向所述旋转叶片机供给电力的供电线,插通于形成为中空状的所述棒状体。
24.如此,利用在形成为中空状的棒状体的内部插通线的构成,能够不使棒状体挠曲而顺畅地执行其伸缩。
25.用于实现上述课题的本发明的高处观察装置的特征在于,具备:立设于设置面并形成为伸缩自如的纵长的棒状体;旋转叶片机,连结于该棒状体,在连结的状态下利用通过多个旋转叶片的旋转产生的浮力使所述棒状体伸缩而将该棒状体定位于希望的高度位置;气体气球,与该旋转叶片机协作地将所述棒状体定位于希望的高度位置,连结于所述棒状体;保持单元,在通过该气体气球以及所述旋转叶片机定位的高度位置固定并保持所述棒状体的高度位置;以及安装于所述旋转叶片机的观察装置,所述棒状体与所述旋转叶片机的连结被解除而该旋转叶片机移至飞行状态。
26.根据该高处观察装置,在利用旋转叶片机以及气体气球定位的高度位置,利用保持单元固定棒状体的高度位置。在这种情况下,若棒状体与旋转叶片机的连结被解除,则旋转叶片机能够移至飞行状态。
27.因而,如果观察的对象物活动或移动,则能够使旋转叶片机移至飞行状态而追踪对象物的活动、移动。
28.此时,由于棒状体利用气体气球固定为其高度位置被定位的状态,因此即使旋转
叶片机与棒状体的连结被解除而旋转叶片机移至飞行状态,棒状体的高度位置也得以保持。
29.之后,在旋转叶片机再次连结于棒状体的情况下,能够在与旋转叶片机移至飞行状态之前相同的高度位置进行观察,因此能够用观察装置稳定地进行高处的对象物的定点观测。
30.发明效果
31.根据该发明,能够稳定地进行高处的对象物的定点观测。
附图说明
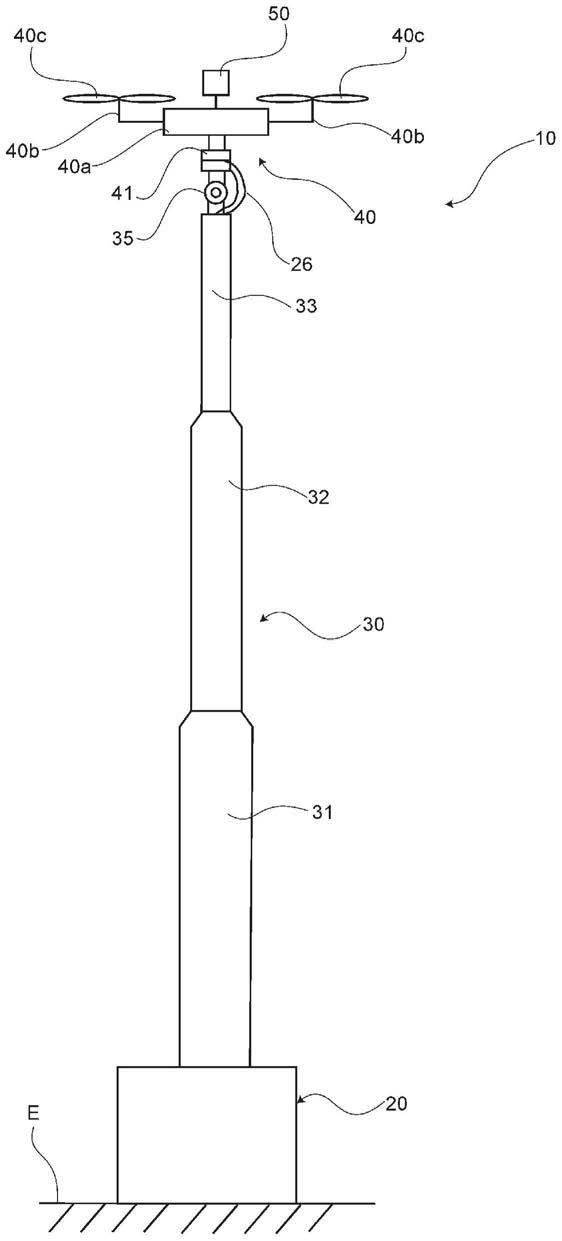
32.图1是说明本发明的第一实施方式的高处观察装置的概略的图。
33.图2同样是说明本实施方式的高处观察装置的卷取机构的概略的图。
34.图3同样是说明本实施方式的高处观察装置的概略的棒状体的剖面图。
35.图4同样是说明本实施方式的高处观察装置的棒状体从收容状态转变为伸长状态的情况的概略的图。
36.图5同样是说明本实施方式的高处观察装置的棒状体与浮力产生单元的连结部分的概略的图。
37.图6同样是说明本实施方式的高处观察装置的棒状体从伸长状态转变为收容状态的情况的概略的图。
38.图7是说明本发明的第二实施方式的高处观察装置的概略的图。
39.图8是说明本发明的第三实施方式的高处观察装置的概略的图。
具体实施方式
40.接下来,参照图1~图8,对本发明的实施方式进行说明。
41.(第一实施方式)
42.基于图1~图6对本发明的第一实施方式进行说明。
43.图1是说明本实施方式的高处观察装置的概略的图,图2是说明高处观察装置的卷取机构的概略的图,图3是说明高处观察装置的概略的棒状体的剖面图。
44.如图示那样,高处观察装置10具备载置于设置面e的基部20、支承于基部20而立设于设置面e的作为纵长棒状体的杆30、连结于杆30的作为浮力产生单元的旋转叶片机40、以及安装于旋转叶片机40的作为观察装置的相机50作为主要构成。
45.基部20具备载置于设置面e而支承杆30的壳体21、以及收容于该壳体21的作为保持单元的卷取机构22。
46.卷取机构22具备:卷轴23,形成为以轴支承于壳体21的旋转轴23a为轴中心旋转自如;电力供给线26,其为卷绕于卷轴23的线,向后述的旋转叶片机40供给电力;以及卡定机构27,限制卷轴23的旋转,并且解除受限制的卷轴23的旋转。
47.在本实施方式中,在卷轴23形成从卷轴23向旋转轴23a的轴向突出的、比卷轴23小径的凸台部24。在该凸台部24中内置线圈弹簧24a,该线圈弹簧24a是始终向把将要卷绕于卷轴23的电力供给线26卷取于卷轴23的方向对卷轴23施力的施力单元。
48.在凸台部24的周向形成多个卡定部25。在本实施方式中,关于该卡定部25,在卷轴
23向将电力供给线26卷取于卷轴23的方向旋转时,卷轴23的旋转方向前端侧具有向径向突出的突出部25a,卷轴23的旋转方向后端侧具有以突出部25a的高度沿旋转方向逐渐降低的方式倾斜的倾斜部25b。
49.卡定机构27具备能够摆动地轴支承于壳体21的第一连杆27a、能够摆动地轴支承于第一连杆27a的前端的第二连杆27b、以及旋转自如地轴支承于第二连杆27b的前端并抵接于在凸台部24的周向上形成的卡定部25的辊27c。
50.在这种构成的卷取机构22中,若卷轴23向将电力供给线26卷取于卷轴23的方向旋转,则辊27c越过卡定部25的突出部25a而旋转,若卷轴23向从卷轴23伸出电力供给线26的方向旋转,则辊27c越过卡定部25的倾斜部25b而旋转。
51.另一方面,在辊27c位于相互相邻的卡定部25之间、即一方的卡定部25的突出部25a与另一方的卡定部25的倾斜部25b之间的情况下,不进行电力供给线26从卷轴23的伸出或者卷取,成为卷轴23的旋转停止的状态。
52.杆30为纵长的棒状,在本实施方式中,具备:外侧圆筒体31;比外侧圆筒体31小径的多个内侧圆筒体,在本实施方式中为内侧第一圆筒体32;比外侧圆筒体31以及内侧第一圆筒体32小径的内侧第二圆筒体33。
53.外侧圆筒体31为具有有着任意长度α的直径且具备上部以及下部开放的周面部31a的中空圆筒状,在上部的开放端缘设定上端缘31b,在下部的开放端缘设定下端缘31c,并且在周面部31a与上端缘31b之间形成随着从周面部31a移至上端缘31b而倾斜地逐渐缩径的缩径部31d。
54.内侧第一圆筒体32为具有有着比长度α小的任意长度β的直径且具备上部以及下部开放的周面部32a的中空圆筒状,在上部的开放端缘设定上端缘32b,在下部的开放端缘设定下端缘32c。
55.在该内侧第一圆筒体32的周面部32a与上端缘32b之间形成随着从周面部32a移至上端缘32b而倾斜地逐渐缩径的缩径部32d,在周面部32a与下端缘32c之间形成随着从周面部32a移至下端缘32c而倾斜地逐渐扩径的扩径部32e。
56.内侧第二圆筒体33为具有有着比长度α以及长度β小的任意长度γ的直径且具备上部以及下部开放的周面部33a的中空圆筒状,在上部的开放端缘设定上端缘33b,在下部的开放端缘设定下端缘33c。
57.在内侧第二圆筒体33的周面部33a与下端缘33c之间形成随着从周面部33a移至下端缘33c而倾斜地逐渐扩径的扩径部33d。
58.在该外侧圆筒体31中从下端缘31c嵌入内侧第一圆筒体32而将内侧第一圆筒体32配置于外侧圆筒体31的内侧,从内侧第一圆筒体32的下端缘32c嵌入内侧第二圆筒体33而将内侧第二圆筒体33配置于内侧第一圆筒体32的内侧并且外侧圆筒体31的内侧。
59.在外侧圆筒体31的内侧与内侧第一圆筒体32的外侧之间夹设微小的间隙,内侧第一圆筒体32形成为能够相对于外侧圆筒体31滑动。同样,在内侧第一圆筒体32的内侧与内侧第二圆筒体33的外侧之间也夹设微小的间隙,内侧第二圆筒体33形成为能够相对于内侧第一圆筒体32滑动。
60.中空状的杆30伸缩自如地形成为,在外侧圆筒体31的内侧配置有内侧第一圆筒体32以及内侧第二圆筒体33的状态下,在该外侧圆筒体31的内侧收容有内侧第一圆筒体32并
且在内侧第一圆筒体32的内侧收容有内侧第二圆筒体33的收容状态、以及内侧第一圆筒体32从外侧圆筒体31的内侧伸出并且内侧第二圆筒体33从内侧第一圆筒体32的内侧伸出的伸长状态之间进行转变。
61.在本实施方式中,在杆30转变为伸长状态,内侧第一圆筒体32的扩径部32e卡定于外侧圆筒体31的缩径部31d,并且内侧第二圆筒体33的扩径部33d卡定于内侧第一圆筒体32的缩径部32d时,杆30为最大长度。
62.这种杆30在外侧圆筒体31的下端缘31c安装于基部20,经由基部20支承于基部20而立设于设置面e。另一方面,在杆30的内侧第二圆筒体33的上端缘23b安装盖34。
63.在本实施方式中,在该盖34中形成电力供给线26所插通的插通孔34a,卷绕于卷取机构22的卷轴23而插通于中空圆筒状的杆30的内部的电力供给线26插通于插通孔34a而在外部露出。该电力供给线26经由将后述的旋转叶片机40连结于杆30的后述的连结器41而电连接于旋转叶片机40。
64.而且,在本实施方式中,在盖34设置支承旋转叶片机40的万向支架35。该万向支架35形成为能够沿图3中箭头所示的x轴以及y轴这两个轴的方向位移。
65.旋转叶片机40具备内置有控制旋转叶片机40的控制机构的主体部40a、从主体部40a突出并延伸的多个臂部40b、以及设于各臂部40b的多个旋转叶片40c作为主要构成,在通过多个旋转叶片40c的旋转而产生的浮力(升力)的作用下上浮而飞行,并由操纵者所操作的未图示的发送机来操纵。
66.该旋转叶片机40在本实施方式中经由连结器41连结于万向支架35。由此,旋转叶片机40支承于万向支架35而连结于杆30。
67.旋转叶片机40与杆30经由连结器41的连结在本实施方式中通过发送机的操作来解除。若连结被解除,则旋转叶片机40能够移至飞行状态而飞行。
68.在本实施方式中,在旋转叶片机40的主体部40a安装有相机50。该相机50由对改变相机50的朝向的未图示的驱动机构进行控制的未图示的控制机构来控制,例如控制成使相机50进行左右旋转的摇摄动作、或者使相机50进行上下倾斜的俯仰动作。
69.图4是说明使杆30从收容状态转变为伸长状态的情况的概略的图。如图4(a)所示,在杆30处于收容状态时,若通过多个旋转叶片40c的旋转,旋转叶片机40向箭头u所示的上升方向上浮,则内侧第一圆筒体32从外侧圆筒体31的内侧逐渐伸出。
70.若移至内侧第一圆筒体32伸出而在内侧第一圆筒体32的扩径部32e卡定于外侧圆筒体31的缩径部31d的高度位置、旋转叶片机40停止其上浮的悬停状态,则杆30如图4(b)所示那样转变为内侧第一圆筒体32从外侧圆筒体31伸出并卡定的伸长状态(第一伸长状态)。
71.此时,卷绕于卷轴23的电力供给线26跟随于旋转叶片机40的上浮而从卷轴23伸出,并且在旋转叶片机40移至悬停状态时,卷取机构22所具备的卡定机构27的辊27c配置于相互相邻的卡定部25、25之间。
72.由此,卷轴23的旋转被限制,电力供给线26从卷轴23伸出的长度得以保持,因此杆30的高度位置被固定并保持于第一伸长状态。
73.另一方面,在杆30处于第一伸长状态时,若旋转叶片机40向上升方向u进一步上升,则内侧第二圆筒体33从内侧第一圆筒体32的内侧逐渐伸出。
74.若移至内侧第二圆筒体33伸出而在内侧第二圆筒体33的扩径部33d卡定于内侧第
一圆筒体32的缩径部32d的高度位置、旋转叶片机40停止其上浮的悬停状态,则杆30如图4(c)所示那样转变为内侧第二圆筒体33从内侧第一圆筒体32以及外侧圆筒体31伸出并卡定的伸长状态(第二伸长状态)。
75.此时,卷绕于卷轴23的电力供给线26跟随于旋转叶片机40的上浮而从卷轴23伸出,并且在旋转叶片机40移至悬停状态时,卷取机构22所具备的卡定机构27的辊27c配置于相互相邻的卡定部25、25之间。
76.由此,卷轴23的旋转被限制,电力供给线26从卷轴23伸出的长度得以保持,因此杆30的高度位置被固定并保持于第二伸长状态。
77.如此,能够使杆30的高度位置从杆30的收容状态向第一伸长状态或者第二伸长状态任意地转变,因此能够根据对象物的观察位置转变为第一伸长状态或者第二伸长状态来用相机50拍摄对象物。
78.例如在将高处观察装置10配置于桥梁的正下方并观察位于桥梁的高处的特定的部位的情况下,能够根据该特定的部位的高度位置使杆30向第一伸长状态或者第二伸长状态转变,并用相机50拍摄特定的部位。
79.或者在从高处对道路的交通状况、活动会场的集客状况等进行观察等的情况下,能够根据可适当地观察它们的状况的高度位置而使杆30向第一伸长状态或者第二伸长状态转变并用相机50拍摄它们的状况。
80.图5是说明杆30与旋转叶片机40的连结部分的概略的图。如图示那样,例如在杆30沿箭头h所示的水平方向摆动的情况下,旋转叶片机40经由形成为能够向x轴以及y轴这两个轴的方向位移的万向支架35沿x轴的方向位移。
81.如此,通过旋转叶片机40经由万向支架35连结于杆30,使得旋转叶片机40以相对于设置面e始终朝向铅垂方向的方式跟随于杆30的摆动而向两个轴的方向位移。
82.图6是说明杆30从伸长状态转变为收容状态的情况的概略的图。如图6(a)所示,在杆30处于第二伸长状态时,若使旋转叶片机40向上升方向u上浮一些,则配置于相互相邻的卡定部25、25之间的卡定机构27的辊27c从该卡定部25、25之间脱出,卷轴23的旋转的限制被解除。
83.若卷轴23的旋转的限制被解除,则在向将电力供给线26卷取于卷轴23的方向对卷轴23施力的线圈弹簧24a的作用下,电力供给线26被卷取而逐渐卷绕于卷轴23。
84.在电力供给线26逐渐卷绕于卷轴23时,通过以使旋转叶片机40向上升方向u提升一些的方式进行操纵,对于线圈弹簧24a的施力作用抗力,从而能够调节电力供给线26的卷取速度。
85.在电力供给线26被卷取而电力供给线26从卷轴23伸出的长度成为杆30的第一伸长状态所对应的长度时,内侧第二圆筒体33的扩径部33d与内侧第一圆筒体32的缩径部32d的卡定被解除,如图6(b)所示,内侧第二圆筒体33收容于内侧第一圆筒体32的内侧。
86.此时,若以使旋转叶片机40向上升方向u提升的方式进行操纵而对于线圈弹簧24a的施力作用抗力,使得卷轴23对电力供给线26的卷取停止,则卡定机构27的辊27c配置于卡定部25、25之间,卷轴23的旋转被限制,电力供给线26从卷轴23伸出的长度得以保持。
87.由此,杆30从第二伸长状态收缩而转变为第一伸长状态,其高度位置被固定并保持于第一伸长状态。
88.另一方面,在使杆30从第二伸长状态转变为收容状态的情况下,在第一伸长状态下不限制卷轴23的旋转地使电力供给线26卷取于卷轴23。
89.在电力供给线26被卷取而电力供给线26从卷轴23伸出的长度成为杆30的收容状态所对应的长度时,内侧第一圆筒体32的扩径部32e与外侧圆筒体31的缩径部31d的卡定被解除,如图6(c)所示,内侧第二圆筒体33以及内侧第一圆筒体32收容于外侧圆筒体31的内侧。
90.如此,能够使杆30的高度位置从杆30的第二伸长状态任意地转变为第一伸长状态或者收容状态,因此在对象物的观察位置变化了的情况下,能够跟随对象物或者停止观察。
91.根据本实施方式的高处观察装置10,能够根据对象物的观察位置利用旋转叶片机40使杆30转变为第一伸长状态或者第二伸长状态。
92.若杆30被定位为第一伸长状态或者第二伸长状态,则在该高度位置,电力供给线26从卷轴23伸出的长度得以保持,杆30的高度位置被固定并保持于第一伸长状态或者第二伸长状态。
93.如此,在杆30被定位为第一伸长状态或者第二伸长状态这种希望的高度位置的状态下,由于其高度位置被固定,因此即使杆30被作用疾风、气流,也可抑制杆30产生挠曲的情况,其结果,可抑制杆30摆动的情况。因而,能够用相机30稳定地进行高处的对象物的定点观测。
94.特别是,在本实施方式中,能够利用旋转叶片机40容易地执行杆30的伸缩。并且,该旋转叶片机40以相对于设置面e始终朝向铅垂的方式跟随于杆30的摆动而向两个轴的方向位移,因此假设杆30摆动,也能够在大致定点稳定地观察对象物。
95.而且,在本实施方式中,通过具备向以旋转轴23a为轴中心旋转自如地形成的卷轴23、旋转叶片机40供给电力、并卷取于卷轴23的电力供给线26的简易构成的卷取机构22,电力供给线26从卷轴23伸出的长度得以支持,且杆30的高度位置被固定并保持于第一伸长状态或者第二伸长状态。
96.该卷取机构22的卷轴23始终被内置于卷轴23的凸台部24的线圈弹簧24a向将电力供给线26卷取于卷轴23的方向施力。
97.因而,在电力供给线26向卷轴23卷取时,不需要进行使电力供给线26卷绕于卷轴23的作业,电力供给线26向卷轴23的卷取容易,因此可简易地实现内侧第一圆筒体32以及内侧第二圆筒体33向杆30的外侧圆筒体31的内侧的收容。
98.该电力供给线26在本实施方式中插通于形成为中空状的杆30的内部,因此能够不使杆30挠曲而顺畅地执行杆30的伸缩。
99.(第二实施方式)
100.接下来,参照图7,对本发明的第二实施方式进行说明。
101.另外,在图7中,对与图1~图6相同的构成标注相同的附图标记,并省略其详细的说明。
102.图7是说明本发明的第二实施方式的高处观察装置的概略的图。如图示那样,高处观察装置60具备载置于设置面e的基部20、支承于基部20并立设于设置面e的作为纵长棒状体的杆30、连结于杆30的作为浮力产生单元的气体气球70、以及安装于气体气球70的作为观察装置的相机50作为主要构成。
103.该气体气球70在本实施方式中具备压入氦、氢等气体的气嚢70a、安装于该气嚢70a而将气嚢70a连结于杆30的覆缘线70b作为主要构成,利用压入气嚢70a的气体而上浮。
104.在使用该气体气球70而使杆30从收容状态转变为第一伸长状态的情况下,例如只要将用于使杆30伸长至第一伸长状态所要求的气体压入气嚢70a即可。
105.另一方面,在使杆30从收容状态转变为第二伸长状态的情况下,只要将用于使杆30伸长至第二伸长状态所要求的气体压入气嚢70a即可。
106.与此相对,在使杆30从第二伸长状态或者第一伸长状态收缩为收容状态时,只要通过手动使卷取机构22的卷轴23向卷取电力供给线26的方向旋转即可。
107.另一方面,只要从气嚢70a逐渐泄漏气体,气体气球70的浮力就会降低,因此在向卷取电力供给线26的方向对卷取机构22的卷轴23施力的作用力下,杆30逐渐收缩。
108.如此,根据本实施方式的高处观察装置60,能够利用简易的构成的气体气球70实现杆30的伸缩。
109.(第三实施方式)
110.接下来,参照图8,对本发明的第三实施方式进行说明。
111.另外,在图8中,对与图1~图7相同的构成标注相同的附图标记,并省略其详细的说明。
112.图8是说明本发明的第三实施方式的高处观察装置的概略的图。如图示那样,高处观察装置80具备载置于设置面e的基部20、支承于基部20并立设于设置面e的作为纵长棒状体的杆30、连结于杆30的旋转叶片机40、与旋转叶片机40同样地连结于杆30的两个气体气球90、90、以及安装于旋转叶片机40的作为观察装置的相机50作为主要构成。
113.气体气球90、90在本实施方式中设于连结臂91、91,该连结臂91、91设于杆30的盖34并向杆30的外侧突出。
114.该气体气球90、90具备压入氦、氢等气体的气嚢90a、安装于气嚢90a而将气嚢90a连结于连结臂91、91的覆缘线90b作为主要构成,利用压入气嚢90a的气体而上浮。
115.在本实施方式中,气体气球90、90在利用旋转叶片机40将杆30定位为第一伸长状态或者第二伸长状态时,与旋转叶片机40协作地将杆30定位为第一伸长状态或者第二伸长状态。
116.利用旋转叶片机40以及气体气球90、90将杆30定位为第一伸长状态或者第二伸长状态,在被定位的高度位置,利用卷取机构22固定杆30的高度位置。
117.在这种情况下,若利用未图示的发送机的操作解除经由连结器41的旋转叶片机40与杆30的连结,则旋转叶片机40能够从悬停状态移至飞行状态。
118.因而,如果观察的对象物活动或移动,则能够使旋转叶片机40移至飞行状态而追踪对象物的活动、移动。
119.此时,由于杆30利用气体气球90、90固定为其高度位置被定位的状态,因此即使旋转叶片机40与杆30的连结被解除而旋转叶片机40移至飞行状态,杆30的高度位置也得以保持。
120.另外,本发明并不限定于上述各实施方式,能够在不脱离发明的主旨的范围内进行各种变更。在上述各实施方式中,说明了卷取机构22的卷轴23具备始终向将电力供给线26卷取于卷轴23的方向施力的线圈弹簧24a的情况,但也可以在卷轴23的旋转轴23a的同轴
上配置在使电力供给线26卷绕于卷轴23时使卷轴23向将电力供给线26卷取于卷轴23的方向旋转的马达。
121.在上述各实施方式中,说明了通过旋转叶片机40或者气体气球70的浮力使杆30从收容状态伸长为第一伸长状态或者第二伸长状态的情况,但也可以构成为例如通过使用了压缩气体的气缸、使用了线圈弹簧的缸体来辅助杆30的伸长。
122.在上述各实施方式中,说明了杆30以从收容状态向第一伸长状态或者第二伸长状态转变的方式被设定高度位置的情况,但也可以构成为进一步准备多个收容于外侧圆筒体31的内侧圆筒体而使伸长状态为更多。
123.在上述各实施方式中,说明了观察装置为相机50的情况,但也可以是温度传感器、红外线传感器等根据观察目的的各种传感器。
124.符号说明
125.10、60、80:高处观察装置;20:基部;22:卷取机构;23:卷轴;26:电力供给线(线);30:杆(棒状体);31:外侧圆筒体;32:内侧第一圆筒体;33:内侧第二圆筒体;35:万向支架;40:旋转叶片机(浮力产生单元);50:相机(观察装置);70:气体气球(浮力产生单元);90:气体气球。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
