技术特征:
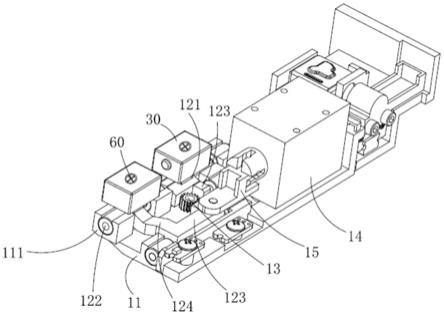
1.一种紧凑型介入手术机器人驱动装置,其特征在于,包括驱动机构、罩设于驱动机构上的长形第一壳体及设置在第一壳体外侧并与驱动机构连接的两夹持组,所述第一壳体内设有沿第一方向依次分布的第一收容空间和第二收容空间,所述驱动机构包括两底架、驱动两底架沿相反方向运动的驱动器,所述底架置于第一收容空间内,所述驱动器置于第二收容空间内。2.如权利要求1所述的一种紧凑型介入手术机器人驱动装置,其特征在于:第一壳体于其一长形侧面设有敞口,所述驱动机构还包括位于所述敞口的沿第一方向延伸的狭长底座。3.如权利要求2所述的一种紧凑型介入手术机器人驱动装置,其特征在于:所述底架安装于靠近所述底座的自由端处。4.如权利要求3所述的一种紧凑型介入手术机器人驱动装置,其特征在于:所述第一壳体背向驱动机构的另一相对侧面上对应所述底座的自由端处部分凹陷形成一台阶面,让所述第一收容空间的高度小于第二收容空间。5.如权利要求4所述的一种紧凑型介入手术机器人驱动装置,其特征在于:所述台阶面设有两活动孔,所述活动孔与所述第一收容空间相连通,所述驱动机构还包括装设于每一底架上的连接杆,两连接杆分别从两活动孔伸出而分别与两夹持组连接。6.如权利要求5所述的一种紧凑型介入手术机器人驱动装置,其特征在于:所述底座上设有滑槽,所述底架凸设有滑动地配合于滑槽的滑柱,让所述底架相对于所述底座平行地滑动设置。7.如权利要求6所述的一种紧凑型介入手术机器人驱动装置,其特征在于:两所述底架大致呈l形分布,相互反向相扣设置。8.如权利要求7所述的一种紧凑型介入手术机器人驱动装置,其特征在于:所述两连接件分别凸设于相应底架上正对的位置并与驱动器沿与底座的延伸方向垂直的方向呈错位设置。9.如权利要求8所述的一种紧凑型介入手术机器人驱动装置,其特征在于:两底架其中之一通过连接件与所述驱动器联动,所述驱动机构还包括连接于两底架上的联动轮。10.如权利要求8所述的一种紧凑型介入手术机器人驱动装置,其特征在于:所述紧凑型介入手术机器人驱动装置还包括安装于所述底座相对自由端的安装端处的力检测装置,所述力检测装置位于所述第二收容空间。11.如权利要求10所述的一种紧凑型介入手术机器人驱动装置,其特征在于:所述驱动器位于所述底架和力检测装置之间。12.如权利要求10所述的一种紧凑型介入手术机器人驱动装置,其特征在于:所述底座的安装端处通过连接组件安装于介入手术机器人从端。
技术总结
一种紧凑型介入手术机器人驱动装置,其包括驱动机构、罩设于驱动机构上的长形第一壳体及设置在第一壳体外侧并与驱动机构连接的两夹持组,所述第一壳体内设有沿第一方向依次分布的第一收容空间和第二收容空间,所述驱动机构包括两底架、驱动两底架沿相反方向运动的驱动器,所述底架置于第一收容空间内,所述驱动器置于第二收容空间内。本发明在高度方向让驱动器与底架相互避开,有效降低整个装置的高度,增大细长型医疗器械的递送长度,提高使用的灵活性。的灵活性。的灵活性。
技术研发人员:ꢀ(51)Int.Cl.A61B34/35
受保护的技术使用者:深圳市爱博医疗机器人有限公司
技术研发日:2021.12.31
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。