1.本发明涉及一种医疗机器人领域装置,尤其涉及一种紧凑型介入手术机器人驱动装置。
背景技术:
2.介入治疗是利用现代高科技手段进行的一种微创性治疗,在医学影像设备的引导下,将特制的导管、导丝等精密器械,引入人体,对体内病态进行诊断和局部治疗。
3.介入治疗应用数字技术,扩大了医生的视野,借助导管、导丝延长了医生的双手,它的切口(穿刺点)仅有米粒大小,不用切开人体组织,就可治疗许多过去无法治疗、必须手术治疗或内科治疗疗效欠佳的疾病,如肿瘤,血管瘤,各种出血等。介入治疗具有不开刀,创伤小,恢复快,效果好的特点,是未来医学的发展趋势。
4.而对于血管介入手术中医生需要长期接收x射线的辐射,为此工程上开发了远隔操作的主从式血管介入手术机器人。主从式血管介入手术机器人可以在强烈辐射的环境下工作,使得医生则在射线环境之外对其控制。
5.从端手术机器人在执行导丝(或导管)夹持、递送的过程中,需要若干相应的传动小车带动,而对于传动小车的高度也是设计的重点,若干传动小车的高度过高(尤其是一车,即设置在最靠近手术病人位置的小车),而导丝(或导管)进入人体又有角度上的要求,为保证导丝(或导管)进入人体的角度不发生变化,需要将用于安装传动小车的无菌盒整体向远离手术病人的方向后移,这样做的最大弊端是,缩减了导丝(或导管)进入手术病人身体的有效长度,进而提高导丝(或导管)进入手术病人病灶位置的难度。而现有的无菌盒上的传动小车(尤其是一车)普遍存在高度过高的问题,因此,亟需对传统的传动小车进行结构改进。
技术实现要素:
6.基于此,有必要针对现有技术中的不足,提供一种新型的紧凑型介入手术机器人驱动装置。
7.一种紧凑型介入手术机器人驱动装置,其包括驱动机构、罩设于驱动机构上的长形第一壳体及设置在第一壳体外侧并与驱动机构连接的两夹持组,所述第一壳体内设有沿第一方向依次分布的第一收容空间和第二收容空间,所述驱动机构包括两底架、驱动两底架沿相反方向运动的驱动器,所述底架置于第一收容空间内,所述驱动器置于第二收容空间内。
8.进一步地,第一壳体于其一长形侧面设有敞口,所述驱动机构还包括位于所述敞口的沿第一方向延伸的狭长底座。
9.进一步地,所述底架安装于靠近所述底座的自由端处。
10.进一步地,所述第一壳体背向驱动机构的另一相对侧面上对应所述底座的自由端处部分凹陷形成一台阶面,让所述第一收容空间的高度小于第二收容空间。
11.进一步地,所述台阶面设有两活动孔,所述活动孔与所述第一收容空间相连通,所述驱动机构还包括装设于每一底架上的连接杆,两连接杆分别从两活动孔伸出而分别与两夹持组连接。
12.进一步地,所述底座上设有滑槽,所述底架凸设有滑动地配合于滑槽的滑柱,让所述底架相对于所述底座平行地滑动设置。
13.进一步地,两所述底架大致呈l形分布,相互反向相扣设置。
14.进一步地,所述两连接件分别凸设于相应底架上正对的位置并与驱动器沿与底座的延伸方向垂直的方向呈错位设置。
15.进一步地,两底架其中之一通过连接件与所述驱动器联动,所述驱动机构还包括连接于两底架上的联动轮。
16.进一步地,所述紧凑型介入手术机器人驱动装置还包括安装于所述底座相对自由端的安装端处的力检测装置,所述力检测装置位于所述第二收容空间。
17.进一步地,所述驱动器位于所述底架和力检测装置之间。
18.进一步地,所述底座的安装端处通过连接组件安装于介入手术机器人从端。
19.本发明的有益效果在于:通过在第一壳体内部设置沿第一方向分布的第一收容空间和第二收容空间,所述驱动机构的底架置于第一收容空间内,所述驱动器置于第二收容空间内,在高度方向让驱动器与底架相互避开,有效降低整个装置的高度,增大细长型医疗器械的递送长度,提高使用的灵活性。
附图说明
20.图1为本发明紧凑型介入手术机器人驱动装置夹持细长型医疗器械后的结构示意图;
21.图2为图1所示紧凑型介入手术机器人驱动装置打开第一盖体、第二盖体后的结构示意图;
22.图3为图2所示紧凑型介入手术机器人驱动装置的分解图;
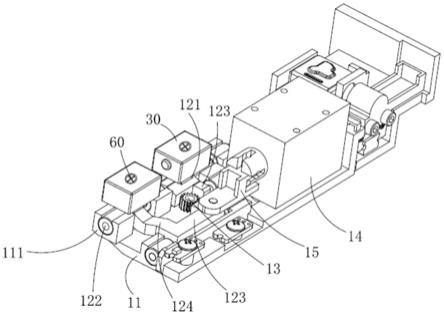
23.图4为图2所示紧凑型介入手术机器人驱动装置的驱动机构的结构示意图;
24.图5为图2所示紧凑型介入手术机器人驱动装置另一角度的分解图。
具体实施方式
25.为了使发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释发明,并不用于限定发明。
26.如图1至图5所示,本发明提供一种紧凑型介入手术机器人驱动装置,其装设于介入手术机器人从端上,对细长型医疗器械(导丝或导管)100执行夹持操作,让介入手术机器人从端推动被夹持的细长型医疗器械100即导丝或导管向前递送或向后撤出以进入或退出手术病人身体。以下说明中,将两夹持组30夹持或松开细长型医疗器械100的方向定义为第一方向,而细长型医疗器械100向前递送或向后撤出的方向定义为第二方向,将与第一方向、第二方向垂直的方向定义为第三方向。图示中,第一方向与第二方向相互垂直。
27.所述紧凑型介入手术机器人驱动装置包括驱动机构10、罩设于驱动机构10上的第
一壳体20、设置在第一壳体20外侧并与驱动机构10连接的两夹持组30、套设于夹持组30外侧的夹套50、包裹在第一壳体20及夹套50外侧的第二壳体40,所述驱动机构10、第一壳体20及夹持组30为非耗材部分,所述第二壳体40及夹套50为耗材部分。
28.所述第二壳体40包括主体部41、活动装设于主体部41一侧的第一盖体42、活动装设于主体部41另一侧的第二盖体43,所述第一盖体42、第二盖体43沿垂直于两夹持组30夹持细长型医疗器械100的方向的第三方向呈相对设置,所述第一盖体42的一侧与主体部41枢接,第一盖体42可以从主体部41上转动,使第一盖体42罩设于两夹持组30外侧或者是向外打开以让两夹持组30外露。
29.所述第二盖体43的一侧同样与主体部41枢接,第二盖体43可以在主体部41上转动,以在主体部41上打开或合上第二盖体43,当第二盖体43在主体部41上处于打开状态时,主体部41露出底部开口415,第二壳体40整体可以在第一壳体20上自由拆装,当第二盖体43盖合在主体部41上时,第二盖体43对第一壳体20底部开口415进行密封。
30.所述主体部41呈中空设置,主体部41背向第二盖体43的一侧设有对接部411,并且所述主体部41背向第二盖体43的一侧设有一阶梯,从而形成一下沉的阶梯面414,所述主体部41的内部对应下沉的阶梯面414设有第三收容空间44和第四收容空间45,所述第三收容空间44的高度小于第四收容空间45,所述阶梯面414设于第三收容空间44的背面。所述对接部411连接于下沉的阶梯面414上,所述对接部411上端设有一沿第一方向延伸的长形开口412,开口412沿第二方向的边缘位置设有相对设置的两导槽413,所述导槽413呈v形设置,导槽413槽宽由边缘向内逐渐缩小。所述第一盖体42上相对位置设有穿孔421,当第一盖体42盖在主体部41上时,第一盖体42上的穿孔421与导槽413沿第二方向相互对齐。
31.所述第一壳体20呈中空设置,第一壳体20于底部一侧的侧面设有敞口26,所述第一壳体20背向驱动机构10一侧凹陷,从而形成一下沉的台阶面21。所述台阶面21设有两活动孔22,所述活动孔22与内部的中空结构相连通,具体地,每一所述活动孔22靠外侧的孔口边缘设有凸边23,所述凸边23之间围在活动孔22孔口边缘的外侧,所述第一壳体20的内部对应下沉的台阶面21设有沿第一方向分布的第一收容空间24和第二收容空间25,所述活动孔22与所述第一收容空间24相连通,所述第一收容空间24的高度小于第二收容空间25,所述台阶面21设于第一收容空间24的背面。
32.所述驱动机构10包括狭长型的底座11、安装于所述底座11的两底架12、同时连接于两底架12上的联动轮13、驱动两底架12沿第一方向反向运动的驱动器14、装设于每一底架12上的连接杆121。所述底架12安装于靠近所述底座11的自由端处,所述台阶面21与底座11的自由端相对应并朝底座11的自由端凹陷形成。两底架12呈扁平板状,水平地设置于所述底座11上。每一底架12沿第一方向凸设有若干滑柱122(图中为三个),所述底座11上对应设有若干滑槽111(图中为三个),每一底架12从第三方向嵌入滑槽111之间,减少高度方向(即第三方向)的叠加,所述滑柱122沿第一方向穿设于滑槽111上,从而使底架12整体在第一方向可以相对于底座11滑动。
33.两底架11大致呈l形分布,反向相扣设置,联动轮13位于两底架12之间。本实施例中,其中一底架12通过一连接件15与所述驱动器10联动。该底架12包括沿第一方向延伸的第一安装段123及沿第二方向延伸的第二安装段124,第一安装段123的两端分别设置两滑柱122,第二安装段124的末端沿第一方向设有一滑柱122,所述连接杆121沿第三方向凸设
于第二安装段124的末端。另一底架12包括沿第二方向延伸的第一安装段123及沿第一方向延伸的第二安装段124,第二安装段124的两端分别设置两滑柱122,其延伸方向与前一底架12的第二安装段124的滑柱122的延伸方向为同一轴线,连接杆121沿第三方向凸设于第二安装段124上,并与另一连接杆121相对,第一安装段123的末端沿第一方向设有一滑柱122。这样,让两底架12与底座11平行地设置,降低整个装置的高度。
34.本实施例中,如上所述,与驱动器10联动的底架12的第一安装段123与驱动器14对齐并通过连接件15与驱动器14联动。也即,驱动器14与所述连接杆121沿第二方向错位地固定在底座11上,减少底座11及整个装置的长度。
35.实际上,根据整个装置的需要,两底架11的具体结构可以相同、也可以不同。
36.两所述底架12在第二方向相对,所述联动轮13可让所述两底架12同步沿第一方向相互靠近或离开。所述两底架12的内侧均设有卡齿,所述联动轮13的外表面设有卡齿,所述联动轮13通过卡齿同时啮合在所述底架12上。所述驱动器14与其中一底架12连接,在联动轮13的作用下,所述驱动器14同时带动两底架12沿第一方向相互反向运动。驱动两夹持组30沿第一方向靠近或远离,带动两夹持组30执行夹持或松开的动作。所述连接杆121沿第三方向延伸,连接杆121可以在活动孔22内沿第一方向进行位移,本实施例中,所述驱动器14是电磁驱动器14。
37.组装时,先将第一壳体20与驱动机构10配合安装,第一壳体20与驱动机构10的底座11合围成一密封空间,所述驱动机构10的底座放置于所述敞口内,所述底架12、联动轮13设置在第一壳体20的第一收容空间24内,所述驱动器14设置在第二收容空间25内,所述底架12的连接杆121从第一壳体20的活动孔22伸出;再将两夹持组30分别装设于从两活动孔22伸出的两连接杆121上,所述第一壳体20上的凸边23伸入到夹持组30内,进一步提高密封效果。再将夹套50套设于夹持组30外侧。最后,打开第二壳体40的第二盖体43,露出第二壳体40的底部开口415,再将第二壳体40罩设于第一壳体20外侧,所述第一壳体20从第二壳体40的底部开口415伸入,所述第一壳体20的阶梯结构分别与第三收容空间44、第四收容空间45配合安装,所述夹持组30及套设于夹持组30上的夹套50伸入对接部411长形开口412内,两夹持组30的中心位置正对所述两v形导槽413。
38.本发明还包括力检测装置60,力检测装置60装设于所述底座11相对自由端的安装端处,所述底架12和力检测装置60分别设置在驱动器14的两侧位置(即所述驱动器14位于所述底架12和力检测装置60之间),减少力检测装置60与驱动机构10在高度上的叠加。所述底座11的安装端处通过连接组件70安装于介入手术机器人从端,外部的介入手术机器人从端通过连接组件70带动紧凑型介入手术机器人驱动装置在轴向上位移。所述力检测装置60设于底座11与连接组件70之间,所述力检测装置60与底座11及连接组件70配合的具体结构可参见专利名称:一种具有力检测功能的从端介入手术机器人动力座、专利申请号:202111144897.1中的相应说明,其全部内容引入本发明。
39.使用时,所述驱动机构10的驱动器14带动两底架12相互远离,分别与两底架12连接的两夹持组30之间形成一安装缝隙,将细长型医疗器械100放置在导槽413及安装缝隙内,再控制驱动器14带动两底架12反向运动,夹持组30向中心位置靠近,使两夹持组30上的夹套50夹紧细长型医疗器械100,再盖上第一盖体42。完成手术后,分别打开第一盖体42、第二盖体43,再将耗材部分的夹套50及第二壳体40取出,下次手术前,重新安装无菌的非耗材
部分。
40.本发明的有益效果在于:通过在第一壳体20上设置阶梯结构,在空间上做避让,使其内部设有沿第一方向分布的第一收容空间24和第二收容空间25,所述驱动机构10的底架12置于第一收容空间24内,所述驱动器14置于第二收容空间25内,在高度方向驱动器14与底架121相互避开,有效降低整个装置的高度,增大细长型医疗器械100的递送长度,提高使用的灵活性。
41.以上所述实施例仅表达了发明的一种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离发明构思的前提下,还可以做出若干变形和改进,这些都属于发明的保护范围。因此,发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。