1.本发明涉及桥壳附件自动焊接技术领域,具体地讲是一种车桥附件双工位翻转焊接变位机械;可广泛用于中、重卡车桥附件自动焊接等方面。
背景技术:
2.驱动桥壳是汽车的主要部件之一,随着机器人自动化焊接大批量的应用,省人、高效、混线生产对桥壳附件焊接变位机械提出较高要求,原有人工焊接已不适应大规模生产的需要,随着汽车工业的高速发展,桥壳产量越来越高,种类越来越多,生产效率越来越快,焊接质量要求越来越高,旧的焊接装备靠手动翻转或只有单工位,操作人员劳动强度大,生产效率低下,急切需要通用性好、可快速翻转的焊接变位机械实现柔性化、高效率、自动化生产。
技术实现要素:
3.本发明的目的是克服上述已有技术存在的不足,而提供一种车桥附件双工位翻转焊接变位机械;主要解决人工翻转焊接或单工位焊接效率低下、劳动强度大、焊接质量差、生产效率低的问题。
4.本发明提供的技术方案是:一种车桥附件双工位翻转焊接变位机械,包括底座,所述的底座两端分别设立柱;其特殊之处在于,所述的两根立柱支撑h型翻转框架,h型翻转框架绕中心由第一伺服电机驱动精确旋转;所述的h型翻转框架两侧分别设一个小框架,两个小框架上分别设第一自转焊接工位和第二自转焊接工位,第一自转焊接工位和第二自转焊接工位分别由第三伺服电机和第二伺服电机驱动旋转;所述的h型翻转框架作为垂直翻转中心,两个相同的自转焊接工位分别由各自的伺服电机驱动绕中心自转,h型翻转框架垂直翻转时两个自转焊接工位同步自转,带动车桥平稳翻转。
5.优选地,所述的第一自转焊接工位和第二自转焊接工位分别由一套琵琶孔自定心撑涨夹具、两套伺服移动v型支撑夹具及两套气动压紧装置组成,所述的琵琶孔自定心撑涨夹具撑涨桥壳琵琶孔中心,伺服移动v型支撑夹具定位桥壳轴线。
6.本发明的有益效果:
7.1、由h型翻转框架回转带动两个自转焊接工位绕回转中心翻转,在其中一件焊接时,另一件同时在外侧装、卸工件,提高机器人利用率、高效生产;
8.2、翻转机械自动化,省人,降低劳动强度;
9.3、每个焊接工位由伺服电机驱动自转以变位工件至最佳姿态,配合机器人保证焊接质量;
10.4、每个自转焊接工位由琵琶孔自定心撑涨夹具撑涨桥壳琵琶孔中心,由v型支撑夹具定位桥壳轴线,v型支撑夹具、气动压紧装置可沿桥壳轴线伺服移动,支撑、压紧车桥轴头,满足不同长度桥壳焊接附件时的定位支撑及压紧翻转需要,夹具通用性好。
附图说明
11.图1是本发明的主视结构示意图;
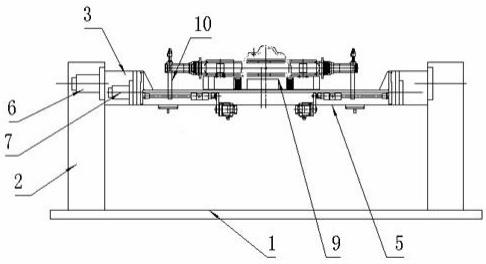
12.图2是本发明的左视结构示意图;
13.图3是本发明的俯视结构示意图;
14.图4是本发明的h型翻转框架结构示意图;
15.图5是本发明的自转焊接工位主视结构示意图;
16.图6是本发明的自转焊接工位左视结构示意图;
17.图7是本发明的自转焊接工位俯视结构示意图。
18.图中:1底座,2立柱,3 h型翻转框架,4第一自转焊接工位,5第二自转焊接工位,6第一伺服电机,7第二伺服电机,8第三伺服电机,9琵琶孔自定心撑涨夹具,10伺服移动v型支撑夹具,11气动压紧装置。
19.具体实施方式:
20.为了更好地理解与实施,下面结合附图给出具体实施例详细说明本发明;所举实施例仅用于解释本发明,并非用于限制本发明的保护范围。
21.如图1、2、3、4、5、6、7所示,一种车桥附件双工位翻转焊接变位机械,包括底座1,底座1两端分别固定一根立柱2,两根立柱支撑一个h型翻转框架3,h型翻转框架3绕中心由第一伺服电机6驱动精确旋转;在h型翻转框架3两侧分别安装一个小框架,每个小框架上分别安装一套琵琶孔自定心撑涨夹具9、两套伺服移动v型支撑夹具10及气动压紧装置11,适应多品种车桥的精确定位、压紧工件,两个小框架分别由第二伺服电机7和第三伺服电机8驱动旋转;h型翻转框架3作为垂直翻转中心,两个小框架及安装在其上的一套琵琶孔自定心撑涨夹具9、两套伺服移动v型支撑夹具10及气动压紧装置11组合成为两个自转焊接工位,即第一自转焊接工位4和第二自转焊接工位5,第一自转焊接工位4和第二自转焊接工位5由各自的第三伺服电机8和第二伺服电机7驱动绕中心自转,与外部轴机器人配合实现焊缝最佳姿态;在整机控制系统控制下由h型翻转框架3带动两个自转焊接工位成为一个双工位翻转焊接变位机械,当其中一个自转焊接工位处于机器人焊接状态时,另一个自转焊接工位可用于装、卸工件,节省了装、卸工件时机器人等待的时间,提高焊接机器人设备利用率,提高焊接生产效率。
22.本发明的一种车桥附件双工位翻转焊接变位机械,在第一自转焊接工位4上放置一工件并自动定位压紧,在伺服电机6驱动下h型翻转框架3翻转将该焊接工位精确翻转至机器人焊接位置,h型翻转框架3垂直翻转时两个自转焊接工位可以同步自转,带动车桥平稳翻转,在伺服电机8驱动下工件自转变位配合外部轴机器人实现工件各条焊缝的最佳姿态焊接,同时处于外侧的第二自转焊接工位5上放置下一工件并自动撑涨定位、支撑、压紧,等待焊接,前一工件焊接完成后在伺服电机6驱动下该焊接工位翻回外侧,自动松开定位和压紧,将焊接完成的桥壳总成起吊进行下一工序,如此循环往复。
23.应当理解的是,本说明书未详细阐述的技术特征都属于现有技术。尽管上面结合附图对本实用新型专利的实施方式进行了描述,但是本实用新型并不局限于上述具体的实施方式,上述的具体实施方式仅仅是示意性的,并不是限制性的,本领域的普通技术人员均可以在本实用新型的启示下,在不脱离本实用新型宗旨和权利要求所保护的范围的情况下,还可以做出更多的形式,这些均属于本实用新型的保护范围之内。
技术特征:
1.一种车桥附件双工位翻转焊接变位机械,包括底座,所述的底座两端分别设立柱;其特征在于,所述的两根立柱支撑h型翻转框架,h型翻转框架绕中心由第一伺服电机驱动精确旋转;所述的h型翻转框架两侧分别设一个小框架,两个小框架上分别设第一自转焊接工位和第二自转焊接工位,第一自转焊接工位和第二自转焊接工位分别由第三伺服电机和第二伺服电机驱动旋转;所述的h型翻转框架作为垂直翻转中心,两个相同的自转焊接工位分别由各自的伺服电机驱动绕中心自转,h型翻转框架垂直翻转时两个自转焊接工位同步自转,带动车桥平稳翻转。2.根据权利要求1所述一种车桥附件双工位翻转焊接变位机械,其特征在于,所述的第一自转焊接工位和第二自转焊接工位分别由一套琵琶孔自定心撑涨夹具、两套伺服移动v型支撑夹具及两套气动压紧装置组成,所述的琵琶孔自定心撑涨夹具撑涨桥壳琵琶孔中心,伺服移动v型支撑夹具定位桥壳轴线。
技术总结
本发明公开了一种车桥附件双工位翻转焊接变位机械,包括底座和立柱,其特点是:立柱上设H型翻转框架,H型翻转框架两侧分别安装一个小框架,每个小框架分别安装琵琶孔自定心撑涨夹具、伺服移动V型支撑夹具及气动压紧装置;H型翻转框架中心作为垂直翻转,两个小框架及琵琶孔自定心撑涨夹具、伺服移动V型支撑夹具及气动压紧装置组合为两个自转焊接工位,H型翻转框架翻转时该两个自转焊接工位可以同步自转,带动车桥平稳翻转,组成一个双工位翻转焊接变位机械,当其中一个焊接工位处于机器人焊接状态时另一个工位同时可用于装、卸工件,节省了装、卸工件时机器人等待的时间,提高焊接机器人设备利用率,提高焊接生产效率。提高焊接生产效率。提高焊接生产效率。
技术研发人员:闫连龙 朱孟涛 杨宁 王新潇 王彬安 王红强 刘海杰 李丽丽 卢洪滨
受保护的技术使用者:山东蓬翔汽车有限公司
技术研发日:2021.11.22
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。