技术特征:
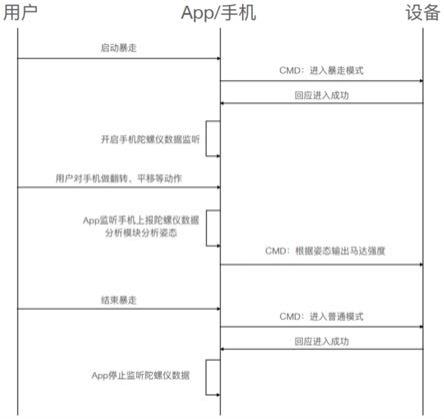
1.一种基于姿态控制双马达按摩装置的方法,包括以下步骤:a、在用户使用按摩装置期间利用其随身设备采集加速度数据;b、将采集到的加速度数据进行坐标系转换;c、分析用户在使用期间是否处于静止;d、若用户处于静止则控制按摩装置执行预设的振动模式,否则根据加速度数据调整振动强度和模式。2.根据权利要求1所述的基于姿态控制双马达按摩装置的方法,其特征在于,在所述步骤(a)中,利用陀螺仪采集加速度数据。3.根据权利要求1所述的基于姿态控制双马达按摩装置的方法,其特征在于,在所述步骤(b)中,将随身设备自身的参考坐标系转换为地球坐标系。4.根据权利要求1所述的基于姿态控制双马达按摩装置的方法,其特征在于,在所述步骤(c)中,对加速度数据在各方向的分量进行求和;若求和后绝对值小于阈值,则判断用户处于静止;若求和后绝对值在设定时间内持续大于阈值,则判断用户处于非静止。5.根据权利要求1所述的基于姿态控制双马达按摩装置的方法,其特征在于,在所述步骤(d)中,在用户处于静止时,则各分量加速度大小对应用户姿势如下:x=0,y=0,z=-9.8,平躺;x=-9.8,y=0,|z|<=9.8,或x=0,y=9.8,|z|<=9.8,左侧翻转;x=9.8,y=0,|z|<=9.8,或x=0,y=-9.8,|z|<=9.8,右侧翻转;x=0,y=0,z=9.8,趴卧。6.根据权利要求1所述的基于姿态控制双马达按摩装置的方法,其特征在于,在所述步骤(d)中,在用户处于非静止时,则进行行走分析;各分量加速度求和绝对值为行走时的瞬时力量,并据此调节按摩装置中马达的振动强度;各分量加速度求和后的方向为行走时的瞬时力的方向,并据此调节按摩装置的振动模式。7.根据权利要求6所述的基于姿态控制双马达按摩装置的方法,其特征在于,所述振动模式为一侧马达渐进而另一侧马达渐弱。
技术总结
本发明涉及一种基于姿态控制双马达按摩装置的方法,包括以下步骤:a、在用户使用按摩装置期间利用其随身设备采集加速度数据;b、将采集到的加速度数据进行坐标系转换;c、分析用户在使用期间是否处于静止;d、若用户处于静止则控制按摩装置执行预设的振动模式,否则根据加速度数据调整振动强度和模式。本发明根据用户姿态调整振动模式,从而实现效果更好且更安全的按摩。全的按摩。全的按摩。
技术研发人员:刘博
受保护的技术使用者:蜜曰科技(北京)有限公司
技术研发日:2020.10.29
技术公布日:2022/5/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。