1.本发明涉及一种基于姿态控制双马达按摩装置的方法。
背景技术:
2.目前的按摩装置中,通常会在后台程序中预设几种振动模式,供用户在使用时自行选取。然而,在用户没有医学临床经验或没受过按摩培训的前提下,无法选择出最适合自己当前姿态的模式。这就会导致按摩效果较差,甚至会使操作者受伤。另外,例如盲人等有身体缺陷的特殊人士在使用按摩装置时,不能自如的使用例如手机等遥控设备,而往往正式这类人群需要使用按摩装置进行身体康复。因此,如果仅采用遥控或按键控制的方式切换振动模式,会不利于残障人群的使用。
技术实现要素:
3.本发明的目的在于提供一种无需按键控制而是基于姿态控制双马达按摩装置的方法。
4.为实现上述目的,本发明提供一种基于姿态控制双马达按摩装置的方法,包括以下步骤:
5.a、在用户使用按摩装置期间利用其随身设备采集加速度数据;
6.b、将采集到的加速度数据进行坐标系转换;
7.c、分析用户在使用期间是否处于静止;
8.d、若用户处于静止则控制按摩装置执行预设的振动模式,否则根据加速度数据调整振动强度和模式。
9.根据本发明的一个方面,在所述步骤(a)中,利用陀螺仪采集加速度数据。
10.根据本发明的一个方面,在所述步骤(b)中,将随身设备自身的参考坐标系转换为地球坐标系。
11.根据本发明的一个方面,在所述步骤(c)中,对加速度数据在各方向的分量进行求和;
12.若求和后绝对值小于阈值,则判断用户处于静止;
13.若求和后绝对值在设定时间内持续大于阈值,则判断用户处于非静止。
14.根据本发明的一个方面,在所述步骤(d)中,在用户处于静止时,则各分量加速度大小对应用户姿势如下:
15.x=0,y=0,z=-9.8,平躺;
16.x=-9.8,y=0,|z|《=9.8,或x=0,y=9.8,|z|《=9.8,左侧翻转;
17.x=9.8,y=0,|z|《=9.8,或x=0,y=-9.8,|z|《=9.8,右侧翻转;
18.x=0,y=0,z=9.8,趴卧。
19.根据本发明的一个方面,在所述步骤(d)中,在用户处于非静止时,则进行行走分析;
20.各分量加速度求和绝对值为行走时的瞬时力量,并据此调节按摩装置中马达的振动强度;
21.各分量加速度求和后的方向为行走时的瞬时力的方向,并据此调节按摩装置的振动模式。
22.根据本发明的一个方面,所述振动模式为一侧马达渐进而另一侧马达渐弱。
23.根据本发明的一个方案,采集随身设备的加速度,分析各分量加速度求和后的数值,从而得出用户处于静止或非静止状态。若用户处于静止状态,则进行姿态分析,输出对应于各个静态姿势的振动强度。若用户处于非静止状态,则根据其行走方向和粒度调整振动强度和振动模式。由此,本发明基于用户的姿态调整按摩装置的振动模式,从而实现效果较好且较为安全的按摩。
附图说明
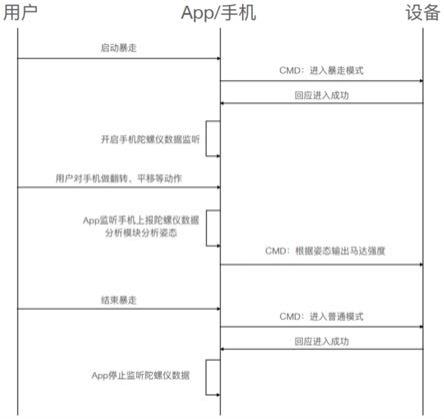
24.图1是示意性表示根据本发明的一种实施方式的方法的时序图。
具体实施方式
25.为了更清楚地说明本发明实施方式或现有技术中的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
26.下面结合附图和具体实施方式对本发明作详细地描述,实施方式不能在此一一赘述,但本发明的实施方式并不因此限定于以下实施方式。
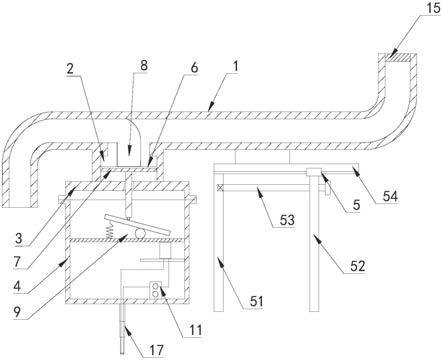
27.参见图1,本发明的控制按摩装置振动模式的方法是基于人体姿态实现。具体的,本发明的控制方法可应用于按摩时附着在人体上的按摩装置,也可以应用于固定式的按摩装置。并且,由于本方法中涉及到识别用户当前姿态,具体为方式为采集加速度并分析。因此若按摩装置本身不具备此功能时,则还需要一个具备加速度采集功能的随身设备,若按摩装置本身为附着设备且具备此功能,则其本身即可视为一个随身设备。由于目前的智能手机通常具备陀螺仪,因此在本实施方式中,选择智能手机作为随身设备,则其既可以控制按摩装置,又可以随身携带用来检测用户姿态。在控制时,可以设计一款适用于按摩装置的app,当用户通过手机app与开启“暴走模式”后,手机内的陀螺仪随即开始数据监听,从而采集加速度数据。在采集时,以手机平放为参考坐标系的标准方向,陀螺仪采集到的加速度数据可分为x轴加速度、y轴加速度和z轴加速度。由此可见,在用户使用期间,尤其是行走期间,手机无法保持平放,这样不利于数据采集。因此,本发明还进行了坐标系转换,从而将手机本身的参考坐标系转换为地球坐标系,得到相对于地球的x轴加速度,y轴加速度,z轴加速度。
28.在用户使用期间,需要监控用户使用按摩装置时的状态,本发明将用户状态分为静止和非静止两种。具体的,采用分析加速度数据的方式判断用户状态。首先,由陀螺仪采集的加速度数据在地球坐标系中具有x、y、z三个方向的分量,本发明采取的方式即为持续追踪加速度数据在各方向的分量,并进行求和。此处,需要预先设定一个阈值,当求和后的绝对值小于这一阈值时,则视为用户处于静止。反之,如果各分量求和后绝对值在设定时间
内持续大于这一阈值,则视为用户处于非静止。上述阈值和设定时间段均可根据实际需求选取。
29.通过上述分析可以识别出用户在使用期间的状态,这也决定了振动模式的不同。具体的,由于用户处于一个静态姿势时一般需要持续一段时间,因此可以预设几种对应不同姿势的振动模式。为了识别用户当前所处的静态姿势,本发明中,依然采用分析加速度数据的方式进行姿态分析,从而得出用户的姿态。用户的姿态与加速度分量紧密相关,具体可分为以下几种:
30.x=0,y=0,z=-9.8,平躺;
31.x=-9.8,y=0,|z|《=9.8,或x=0,y=9.8,|z|《=9.8,左侧翻转;
32.x=9.8,y=0,|z|《=9.8,或x=0,y=-9.8,|z|《=9.8,右侧翻转;
33.x=0,y=0,z=9.8,趴卧。
34.由此,通过上述对加速度分量的分析,可以得出当前用户的姿态。随即可以输出预先设定的与各个姿态对应的振动模式,以使得按摩装置的按摩效果达到最佳。当然,上述模式仅为本发明的一种实施方式,实际设计时可根据加速度传感器的相应参数进行调整。例如平躺和趴卧、左侧翻转和右侧翻转时的x、y、z参数也可相反。
35.在此期间,如果用户调整姿态,例如翻身、坐起等,振动模式也会随之改变。当然,本实施方式中用手机作为随身设备,因此上述振动模式不仅会随着用户姿态改变,还可以随着用户翻动或平移手机而切换,从而实现更加丰富的按摩体验。
36.如果用户不是处于静止状态,则可根据加速度数据调整按摩装置中的马达的振动强度和模式。本实施方式中,设定按摩装置具有主、副两个振子马达,则振动模式为一侧马达渐进,另一侧马达渐弱的形式。在非静止状态下,需要进行行走分析,在分析中,各分量加速度求和绝对值等于行走时的瞬时力量,可据此调节振动强度。例如,行走力度越大则振动强度也越大,当然也可以根据按摩对应的部位和按摩目的对此进行调整。根据行走力度调节振动强度的好处在于,可以使本方法控制的按摩装置的按摩力度适应于不同人群。各分量加速度求和后的方向视为行走的瞬时力的方向,并以此调节振动模式。例如,正方向时主马达渐进而副马达渐弱;负方向时副马达渐进而主马达渐弱。本发明上述所称“强度”可以为振幅和/或频率。在使用期间,用户可通过手机app选择结束“暴走模式”,则手机内部的陀螺仪停止监听,按摩装置也可随即进入普通状态。
37.以上所述仅为本发明的一个实施方式而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。