1.本发明属于水下机器人技术领域,具体涉及一种自主水下机器人抛绳装置及其使用方法。
背景技术:
2.随着社会的发展和科技的不断进步,人们逐渐深入对海洋资源资源的探索和开发,使得海洋资源的探查区域不断扩大,并不断向深海、远海延伸。针对复杂海况的探索为了消除对科技工作者自身造成伤害或安全隐患,开始逐渐致力于水下机器人的研究和应用。
3.目前,针对海洋资源的探查所采用的水下机器人的种类越来越多,水下机器人也被广泛应用到军事海洋技术、海洋科学技术考察、海底勘探、管路检修、油田勘探等多个行业领域。
4.为了确保水下机器人与拖拽载体之间的连接,通常采用缆绳将水下机器人移动到恰当位置,再用起吊机的方式回收。但是,由于受到海上风浪的影响,水下机器人的抛绳一直是世界性的难题,作业过程比较困难。目前针对水下机器人抛绳器通常采用火工品驱动发射的方式,工艺复杂,造价昂贵,且存在安全隐患。另外,现有技术还通过使水下机器人在水面自动抛射出缆绳,并由母船上的专业人员将缆绳打捞后进行相应的回收操作。该操作方式无法使机器人在水下自动完成抛绳操作,抛绳的准确度大大降低。
技术实现要素:
5.针对现有的水下机器人抛绳抛绳操作复杂繁琐,无法在水下进行有效、精准完成抛绳操作的问题,本发明提供一种自主水下机器人抛绳装置及其使用方法,利用自主水下机器人(autonomous underwater vehicle,auv)的抛射筒内形成的磁吸负载以及抛射筒内提供抛射弹力的弹簧双重作用下,将连接抛射绳的抛射头弹射出抛射筒,带动全部抛射绳弹出,以便工作人员使用捞绳器将auv回收。
6.为实现上述目的,本发明实施例提供了如下的技术方案:
7.第一方面,在本发明提供的一个实施例中,提供了一种自主水下机器人抛绳装置,包括抛射筒,所述抛射筒安装在自主水下机器人的安装平台上,所述抛射筒包括:
8.抛射头,放置于所述抛射筒内,且抛射头朝向抛射筒敞口的抛射筒口设置;
9.止挡件,安装在抛射头外侧的抛射筒口内壁上,止挡件用于对位于抛射筒内的抛射头止挡;
10.弹射驱动组件,位于抛射头远离抛射筒敞口一端的抛射筒内,弹射驱动组件用于驱动抛射头撞击止挡件后弹射出抛射筒;以及
11.抛射绳,抛射绳与抛射头连接,用于牵引弹射出的抛射头;
12.其中,所述弹射驱动组件包括位于抛射头内侧抛射筒的压缩弹簧和电磁铁;电磁铁用于吸附抛射头挤压压缩弹簧,并在消磁后通过压缩弹簧将抛射头弹射抛出。
13.在水下自主机器人需要抛绳的时候,通过电磁驱动的方式使得弹射驱动组件带动抛射头下压压缩弹簧,在消磁后由压缩弹簧弹射出去,抛射头弹射出时,撞开止挡件后带动全部抛射绳一同抛出,以便工作人员使用捞绳器打捞到抛射头后,将水下自主机器人回收。
14.在一些可选的实施例中,所述抛射筒与安装平台之间还安装有固定支架,所述固定支架固定在水下自主机器人的安装平台上且通过轴销与抛射筒铰接,方便抛射筒能够绕与固定支架连接的轴销转动;所述抛射筒一侧还连接有抛射调节杆,抛射调节杆用于调节抛射筒的朝向。
15.在水下自主机器人需要抛绳的时候,若水下自主机器人的抛射筒所对应的抛绳方向偏离待打捞回收抛绳的位置时,此时,抛射调节杆启动,改变抛射筒的抛射筒口方向,以便调节抛射筒内抛射头的抛射方位,使得抛射头抛出后更加靠近打捞的工作人员,高效可靠轻量化,解决水下自主机器人抛射中的抛射角度问题,为水下自主机器人顺利回收提供了安全保障。
16.在一些可选的实施例中,所述抛射调节杆为电动推杆,电动推杆的缸筒及推杆均通过铰接座于安装平台和抛射筒连接,以便调节电动推杆伸缩长度,进而调节抛射筒的朝向。
17.在一些可选的实施例中,所述止挡件包括锁止销、锁止滑块、锁止销孔以及锁止弹簧;所述锁止销孔位于抛射筒的抛射筒口内侧壁上,所述锁止销与位于锁止销孔内的锁止滑块连接,所述锁止滑块内的锁止销孔内安装有锁止弹簧,锁止弹簧用于将锁止滑块以及锁止销向抛射筒内部推挤,以便锁止销伸出后对抛射筒内的抛射头止挡。
18.在一些可选的实施例中,所述锁止销端部设有斜锲面,以便抛射头装入抛射筒内或从抛射筒内向外弹出时,通过挤压锁止销端部,利用斜锲面产生一个对锁止滑块挤压的分力,以便压缩锁止弹簧,使锁止销端部压缩至锁止销孔内,将抛射头装入抛射筒内或从抛射筒内向外弹出。
19.在一些可选的实施例中,在弹射驱动组件未启用状态下,所述抛射头对锁止销端部斜锲面产生的分力小于锁止弹簧的弹力,此时锁止销端部不会被压缩,锁止销对抛射头止挡。
20.在一些可选的实施例中,所述抛射头包括锥形帽、浮力块、衔铁块以及抛射底座,所述锥形帽镶嵌在浮力块朝向抛射筒口的一侧,浮力块远离抛射筒口的一侧固定有抛射底座,抛射底座呈倒凸字型结构,抛射底座底端中部镶嵌有衔铁块。
21.在一些可选的实施例中,所述抛射筒还设有导轨组件,导轨组件包括镶嵌于抛射筒内壁上的轨道本体以及位于轨道本体内的轨道槽,所述轨道槽沿抛射筒的轴向方向设置,所述轨道本体的数量为两个且相对于抛射筒的轴线中心对称。
22.在一些可选的实施例中,所述止挡件数量为两个且分别位于抛射筒口的两个轨道槽内,所述抛射底座两侧还形成有抛射弹力臂,抛射弹力臂滑动设置在两个轨道槽内。
23.轨道槽的存在,可以对抛射头进行限位,使得抛射头在弹射时,仅能沿抛射筒的轴线方向移动,并利用抛射底座两侧的抛射弹力臂撞击止挡件的锁止销,以从抛射筒口抛出,避免抛射头在抛射筒内旋转,而导致抛射弹力臂与止挡件错开,无法撞击到锁止销,或致使锁止销失去止挡作用。
24.在一些可选的实施例中,所述抛射头上还设有固定绳结,固定绳结位于抛射头尾
部,固定绳结用于与抛射绳的一端连接,以便抛射头弹射时带动全部抛射绳弹出。
25.在一些可选的实施例中,所述压缩弹簧一端与抛射头的抛射底座相抵,压缩弹簧另一端固定在弹簧固定座上,弹簧固定座与抛射筒内壁连接,所述弹簧固定座中部安装有电磁铁,所述电磁铁包括:
26.铁芯,铁芯与衔铁块位于同一轴线方向上;
27.绕组线圈,绕设在所述铁芯上;以及
28.隔磁套筒,位于绕组线圈及铁芯外部,隔磁套筒固定在抛射筒上且隔磁套筒上还设有供绕组线圈穿出的密封接头。
29.在进行驱动抛射头弹射时,绕组线圈通电与铁芯产生的磁场对抛射头上的衔铁块产生吸力,带动抛射头沿轨道槽滑动,对压缩弹簧压缩,并在弹射时,绕组线圈断电消磁,在压缩弹簧弹力作用下将抛射头弹出,弹出的抛射头带动抛射绳上浮至水面,以便工作人员进行打捞水下自主机器人。
30.在一些可选的实施例中,所述抛射绳置于抛射筒一侧的抛绳收纳腔中,所述抛绳收纳腔与抛射筒内部腔体之间设有隔板,所述抛绳收纳腔内设有与抛射绳一端连接的系绳销,方便在抛射绳抛出后,通过系绳销保持与抛射筒、安装平台以及整个水下机器人的连接,以方便对水下机器人回收。
31.第二方面,在本发明提供的一个实施例中,提供了一种自主水下机器人抛绳装置的使用方法,该方法包括以下步骤:
32.步骤一、水下自主机器人接收抛绳指令时,根据定位的回收工作船的方位调整抛射调节杆的长度,调节抛射筒的抛射角度;
33.步骤二、角度调节完成时,启动绕组线圈通电开始工作,绕组线圈与铁芯形成的电磁铁吸附抛射头对压缩弹簧压缩,完成待发射状态;
34.步骤三、响应抛绳指令后,绕组线圈断电消磁,在压缩弹簧弹力作用下,抛射头撞击开止挡件后由抛射筒口弹射出去,抛射头带动全部抛射绳弹出,在抛射头的浮力块作用下,工作人员在水面打捞抛射头并将水下自主机器人回收。
35.与现有技术相比,本发明的有益效果是:
36.本发明的实施方式中公开的自主水下机器人抛绳装置,相比常规的抛绳装置而言,巧妙地利用了轻量化的磁吸负载以及弹簧作为抛绳的动力机构,无需安装抛绳的电机等复杂结构件;也无需对单独开启或关闭锁止结构或扣合盖,可以在抛绳时自动撞击止挡结构弹出,带动全部抛射绳弹出,以便工作人员使用捞绳器将自主水下机器人回收,便于调节抛射筒内抛射头的抛射方位,使得抛射头抛出后更加靠近打捞的工作人员,高效可靠轻量化,解决水下自主机器人抛射中的抛射角度问题,为水下自主机器人顺利回收提供了安全保障。
37.本发明的这些方面或其他方面在以下实施例的描述中会更加简明易懂。应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
附图说明
38.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些
实施例。
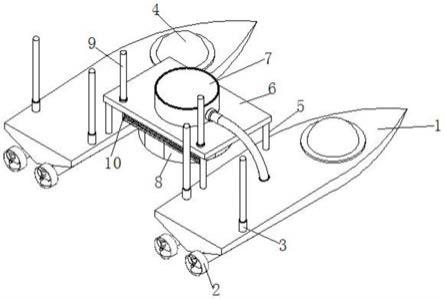
39.图1为本发明的自主水下机器人抛绳装置的结构示意图。
40.图2为本发明的自主水下机器人抛绳装置中止挡件的结构示意图。
41.图3为本发明的自主水下机器人抛绳装置中抛射头的结构示意图。
42.图4为本发明的自主水下机器人抛绳装置中位于电磁铁一侧的抛绳收纳腔结构示意图。
43.图5为本发明的自主水下机器人抛绳装置中导轨组件的结构示意图。
44.附图标记说明:
45.1-安装平台;11-固定支架;12-抛射调节杆;
46.2-抛射筒;
47.21-止挡件;211-锁止销;212-锁止滑块;213-锁止销孔;214-锁止弹簧;
48.22-抛射头;221-锥形帽;222-浮力块;223-衔铁块;224-固定绳结;225-抛射底座;226-抛射弹力臂;
49.23-弹射驱动组件;231-压缩弹簧;232-弹簧固定座;233-绕组线圈;234-铁芯;235-隔磁套筒;236-密封接头;
50.24-导轨组件;241-轨道本体;242-轨道槽;
51.25-抛射绳;
52.3-抛绳收纳腔;31-系绳销;32-隔板。
具体实施方式
53.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
54.本技术发明人发现,现有的水下机器人的抛绳通常采用火工品驱动发射的方式,工艺复杂,造价昂贵,且存在安全隐患。通过使水下机器人在水面自动抛射出缆绳,并由母船上的专业人员将缆绳打捞后进行相应的回收操作。该操作方式无法使机器人在水下自动完成抛绳操作,抛绳的准确度大大降低。
55.为解决上述问题,本发明实施例提供的一种自主水下机器人抛绳装置,利用自主水下机器人的抛射筒2内形成的磁吸负载以及抛射筒2内提供抛射弹力的弹簧双重作用下,将连接抛射绳25的抛射头22弹射出抛射筒2,带动全部抛射绳25弹出,以便工作人员使用捞绳器将自主水下机器人回收。
56.以下结合附图并通过具体实施方式来进一步说明本发明的技术方案。
57.图1示出了安装有本发明的自主水下机器人抛绳装置抛绳面的结构示意图。
58.如图1所示,在本发明提供的一个实施方式中,提供了一种自主水下机器人抛绳装置,包括抛射筒2,所述抛射筒2安装在自主水下机器人的安装平台1上。在本实施例中,所述抛射筒2与安装平台1之间还安装有固定支架11,所述固定支架11固定在水下自主机器人的安装平台1上且通过轴销与抛射筒2铰接,方便抛射筒2能够绕与固定支架11连接的轴销转动;所述抛射筒2一侧还连接有抛射调节杆12,抛射调节杆12用于调节抛射筒2的朝向。
59.优选的,所述抛射调节杆12为电动推杆,电动推杆的缸筒及推杆均通过铰接座于
安装平台1和抛射筒2连接,以便调节电动推杆伸缩长度,进而调节抛射筒2的朝向。
60.在水下自主机器人需要抛绳的时候,若水下自主机器人的抛射筒2所对应的抛绳方向偏离待打捞回收抛绳的位置时,此时,抛射调节杆12启动,改变抛射筒2的抛射筒口方向,以便调节抛射筒2的抛射方位,使得抛射出后更加靠近打捞的工作人员,高效可靠轻量化,解决水下自主机器人抛射中的抛射角度问题,为水下自主机器人顺利回收提供了安全保障。
61.参见图1所示,所述抛射筒2包括止挡件21、抛射头22、弹射驱动组件23、导轨组件24以及抛射绳25。所述抛射头22放置于所述抛射筒2内,且抛射头22朝向抛射筒2敞口的抛射筒口设置,止挡件21安装在抛射头22外侧的抛射筒口内壁上,止挡件21用于对位于抛射筒2内的抛射头22止挡。
62.在本发明实施例中,参见图1和图3所示,所述抛射头22包括锥形帽221、浮力块222、衔铁块223以及抛射底座225,所述锥形帽221镶嵌在浮力块222朝向抛射筒口的一侧,浮力块222远离抛射筒口的一侧固定有抛射底座225,抛射底座225呈倒凸字型结构,抛射底座225底端中部镶嵌有衔铁块223。
63.其中,参见图1和图5所示,所导轨组件24包括镶嵌于抛射筒2内壁上的轨道本体241以及位于轨道本体241内的轨道槽242,所述轨道槽242沿抛射筒2的轴向方向设置,所述轨道本体241的数量为两个且相对于抛射筒2的轴线中心对称。
64.所述止挡件21数量为两个且分别位于抛射筒口的两个轨道槽242内,所述抛射底座225两侧还形成有抛射弹力臂226,抛射弹力臂226滑动设置在两个轨道槽242内。
65.在本实施例中,轨道槽242的存在,可以对抛射头22进行限位,使得抛射头22在弹射时,仅能沿抛射筒2的轴线方向移动,并利用抛射底座225两侧的抛射弹力臂226撞击止挡件21的锁止销211,以从抛射筒口抛出,避免抛射头22在抛射筒2内旋转,而导致抛射弹力臂226与止挡件21错开,无法撞击到锁止销211,或致使锁止销211失去止挡作用。
66.参见图1和图2所示,在本发明的一个实施例中,所述止挡件21包括锁止销211、锁止滑块212、锁止销孔213以及锁止弹簧214;所述锁止销孔213位于抛射筒2的抛射筒口内侧壁上,所述锁止销211与位于锁止销孔213内的锁止滑块212连接,所述锁止滑块212内的锁止销孔213内安装有锁止弹簧214,锁止弹簧214用于将锁止滑块212以及锁止销211向抛射筒2内部推挤,以便锁止销211伸出后对抛射筒2内的抛射头22止挡。
67.所述锁止销211端部设有斜锲面,以便抛射头22装入抛射筒2内或从抛射筒2内向外弹出时,通过挤压锁止销211端部,利用斜锲面产生一个对锁止滑块212挤压的分力,以便压缩锁止弹簧214,使锁止销211端部压缩至锁止销孔213内,将抛射头22装入抛射筒2内或从抛射筒2内向外弹出。
68.在弹射驱动组件23未启用状态下,所述抛射头22对锁止销211端部斜锲面产生的分力小于锁止弹簧214的弹力,此时锁止销211端部不会被压缩,锁止销211对抛射头22止挡。
69.所述抛射头22上还设有固定绳结224,固定绳结224位于抛射头22尾部,抛射绳25与抛射头22连接,用于牵引弹射出的抛射头22,固定绳结224用于与抛射绳25的一端连接,以便抛射头22弹射时带动全部抛射绳25弹出。
70.在本发明的一个实施例中,所述抛射绳25置于抛射筒2一侧的抛绳收纳腔3中,所
述抛绳收纳腔3与抛射筒2内部腔体之间设有隔板32,所述抛绳收纳腔3内设有与抛射绳25一端连接的系绳销31,方便在抛射绳25抛出后,通过系绳销31保持与抛射筒2、安装平台1以及整个水下机器人的连接,以方便对水下机器人回收。
71.参见图1和图4所示,所述弹射驱动组件23,位于抛射头22远离抛射筒2敞口一端的抛射筒2内,弹射驱动组件23用于驱动抛射头22撞击止挡件21后弹射出抛射筒2。所述弹射驱动组件23包括位于抛射头22内侧抛射筒2的压缩弹簧231和电磁铁;电磁铁用于吸附抛射头22挤压压缩弹簧231,并在消磁后通过压缩弹簧231将抛射头22弹射抛出。
72.所述压缩弹簧231一端与抛射头22的抛射底座225相抵,压缩弹簧231另一端固定在弹簧固定座232上,弹簧固定座232与抛射筒2内壁连接,所述弹簧固定座232中部安装有电磁铁。
73.在本发明的一个实施例中,所述电磁铁包括铁芯234、绕组线圈233以及隔磁套筒235。铁芯234与衔铁块223位于同一轴线方向上;绕组线圈233绕设在所述铁芯234上;隔磁套筒235位于绕组线圈233及铁芯234外部,隔磁套筒235固定在抛射筒2上且隔磁套筒235上还设有供绕组线圈233穿出的密封接头236。
74.在进行驱动抛射头22弹射时,绕组线圈233通电与铁芯234产生的磁场对抛射头22上的衔铁块223产生吸力,带动抛射头22沿轨道槽242滑动,对压缩弹簧231压缩,并在弹射时,绕组线圈233断电消磁,在压缩弹簧231弹力作用下将抛射头22弹出,弹出的抛射头22带动抛射绳25上浮至水面,以便工作人员进行打捞水下自主机器人。
75.如图1所示,在本发明提供的一个实施方式中,还提供了一种自主水下机器人抛绳装置的使用方法,该方法包括以下步骤:
76.步骤一、水下自主机器人接收抛绳指令时,根据定位的回收工作船的方位调整抛射调节杆12的长度,调节抛射筒2的抛射角度;
77.步骤二、角度调节完成时,启动绕组线圈233通电开始工作,绕组线圈233与铁芯234形成的电磁铁吸附抛射头22对压缩弹簧231压缩,完成待发射状态;
78.步骤三、响应抛绳指令后,绕组线圈233断电消磁,在压缩弹簧231弹力作用下,抛射头22撞击开止挡件21后由抛射筒口弹射出去,抛射头22带动全部抛射绳25弹出,在抛射头22的浮力块222作用下,工作人员在水面打捞抛射头22并将水下自主机器人回收。
79.在进行驱动抛射头22弹射时,绕组线圈233通电与铁芯234产生的磁场对抛射头22上的衔铁块223产生吸力,带动抛射头22沿轨道槽242滑动,对压缩弹簧231压缩,并在弹射时,绕组线圈233断电消磁,在压缩弹簧231弹力作用下将抛射头22弹出,弹出的抛射头22带动抛射绳25上浮至水面,以便工作人员进行打捞水下自主机器人。
80.综上所述,本发明的实施方式中公开的自主水下机器人抛绳装置,相比常规的抛绳装置而言,巧妙地利用了轻量化的磁吸负载以及弹簧作为抛绳的动力机构,无需安装抛绳的电机等复杂结构件;也无需对单独开启或关闭锁止结构或扣合盖,可以在抛绳时自动撞击止挡结构弹出,带动全部抛射绳25弹出,以便工作人员使用捞绳器将自主水下机器人回收,便于调节抛射筒2内抛射头22的抛射方位,使得抛射头22抛出后更加靠近打捞的工作人员,高效可靠轻量化,解决水下自主机器人抛射中的抛射角度问题,为水下自主机器人顺利回收提供了安全保障。
81.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精
神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。