1.本技术涉及信号处理技术领域,尤其涉及一种用于信号处理方法及相关装置。
背景技术:
2.无线信号在发射机和接收机间进行传播,可能经历直射、反射、衍射或者散射,而且,由于信道本身的随机性,各种传播机制在传输中的影响也是随机的,无线信道则由于以上各种因素影响,呈现出很强的随机时变性。信道特性可以分为大尺度衰落和小尺度衰落,其中大尺度衰落包括传播损耗,阴影衰落等。小尺度衰落包括多径时延、多普勒扩展等,其中,多普勒扩展是描述信号随时间变化的特性。接收机在对接收信号进行解调前,需要对多普勒扩展进行估计,利用估计得到的多普勒扩展计算时域相关性,从而进行时域维纳滤波,即时域相关性的精准度,直接影响维纳滤波效果,从而,影响信号处理效果,因此,如何提升时域相关性的精准度问题亟待解决。
技术实现要素:
3.本技术实施例提供一种信号处理方法及相关装置,能够提升时域相关性的精准度。
4.第一方面,本技术实施例提供一种信号处理方法,所述方法包括:
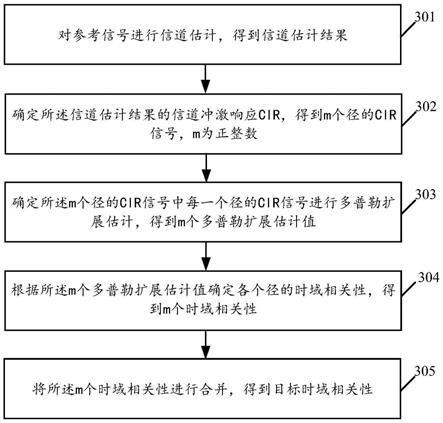
5.对参考信号进行信道估计,得到信道估计结果;
6.确定所述信道估计结果的信道冲激响应cir,得到m个径的cir信号,m为正整数;
7.对所述m个径的cir信号中每一个径的cir信号进行多普勒扩展估计,得到m个多普勒扩展估计值;
8.根据所述m个多普勒扩展估计值确定各个径的时域相关性,得到m个时域相关性;
9.将所述m个时域相关性进行合并,得到目标时域相关性。
10.第二方面,本技术实施例提供一种信号处理装置,所述装置包括:信道估计单元、确定单元和合并单元,其中,
11.所述信道估计单元,用于对参考信号进行信道估计,得到信道估计结果;
12.所述确定单元,用于确定所述信道估计结果的信道冲激响应cir,得到m个径的cir信号,m为正整数;对所述m个径的cir信号中每一个径的cir信号进行多普勒扩展估计,得到m个多普勒扩展估计值;以及根据所述m个多普勒扩展估计值确定各个径的时域相关性,得到m个时域相关性;
13.所述合并单元,用于将所述m个时域相关性进行合并,得到目标时域相关性。
14.第三方面,本技术实施例提供一种通信芯片,所述通信芯片包括处理器和存储器,所述处理器配置成:
15.对参考信号进行信道估计,得到信道估计结果;
16.确定所述信道估计结果的信道冲激响应cir,得到m个径的cir信号,m为正整数;
17.对所述m个径的cir信号中每一个径的cir信号进行多普勒扩展估计,得到m个多普
勒扩展估计值;
18.根据所述m个多普勒扩展估计值确定各个径的时域相关性,得到m个时域相关性;
19.将所述m个时域相关性进行合并,得到目标时域相关性。
20.第四方面,本技术实施例提供一种电子设备,所述电子设备包括处理器、存储器,所述存储器用于存储一个或多个程序,并且被配置由处理器执行,所述程序包括用于执行如第一方所描述的部分或者全部步骤。
21.第五方面,本技术实施例提供了一种计算机可读存储介质,其中,上述计算机可读存储介质存储用于电子数据交换的计算机程序,其中,上述计算机程序使得计算机执行如本技术实施例第一方面中所描述的部分或全部步骤。
22.第六方面,本技术实施例提供了一种计算机程序产品,其中,上述计算机程序产品包括存储了计算机程序的非瞬时性计算机可读存储介质,上述计算机程序可操作来使计算机执行如本技术实施例第一方面中所描述的部分或全部步骤。该计算机程序产品可以为一个软件安装包。
23.实施本技术实施例,具备如下有益效果:
24.可以看出,本技术实施例中所描述的信号处理方法及相关装置,对参考信号进行信道估计,得到信道估计结果,确定信道估计结果的信道冲激响应cir,得到m个径的cir信号,m为正整数,对m个径的cir信号中每一个径的cir信号进行多普勒扩展估计,得到m个多普勒扩展估计值,根据m个多普勒扩展估计值确定各个径的时域相关性,得到m个时域相关性,将m个时域相关性进行合并,得到目标时域相关性,由于每个径具有不同的时域变化特征,不同的径具有不同的多普勒扩展,基于不同径的多普勒扩展确定每个径的时域相关性,则每一时域相关性可以深度代表每个径的特性,再将各径的时域相关性合并,得到最终的时域相关性,进而,能够计算得到更准确的时域相关性,从而提升信道估计性能。
附图说明
25.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
26.图1是本技术实施例提供的一种电子设备的结构示意图;
27.图2是本技术实施例提供的一种电子设备的软件结构示意图;
28.图3a是本技术实施例提供的一种信号处理方法的流程示意图;
29.图3b是本技术实施例提供的另一种信号处理方法的流程示意图;
30.图3c是本技术实施例提供的另一种信号处理方法的流程示意图;
31.图3d是本技术实施例提供的一种信号的演示示意图;
32.图4是本技术实施例提供的另一种信号处理方法的流程示意图;
33.图5是本技术实施例提供的另一种电子设备的结构示意图;
34.图6是本技术实施例提供的一种信号处理装置的功能单元组成框图。
具体实施方式
35.下面将结合附图,对本技术实施例中的技术方案进行描述。
36.为了更好地理解本技术实施例的方案,下面先对本技术实施例可能涉及的相关术语和概念进行介绍。
37.本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其他步骤或单元。
38.具体实现中,本技术实施例中,电子设备可以包括各种具有通信功能的设备,例如,手持设备(智能手机、平板电脑等)、车载设备(导航仪、辅助倒车系统、行车记录仪、车载冰箱等等)、可穿戴设备(智能手环、无线耳机、智能手表、智能眼镜等等)、计算设备或连接到无线调制解调器的其他处理设备,以及各种形式的用户设备(user equipment,ue),移动台(mobile station,ms),虚拟现实/增强现实设备,终端设备(terminal device)等等,电子设备还可以为基站或者服务器或者接收机或者通信芯片。
39.电子设备还可以包括智能家居设备,智能家居设备可以为以下至少一种:智能音箱、智能摄像头、智能电饭煲、智能轮椅、智能按摩椅、智能家具、智能洗碗机、智能电视机、智能冰箱、智能电风扇、智能取暖器、智能晾衣架、智能灯、智能路由器、智能交换机、智能开关面板、智能加湿器、智能空调、智能门、智能窗、智能灶台、智能消毒柜、智能马桶、扫地机器人等等,在此不做限定。
40.第一部分,本技术所公开的技术方案的软硬件运行环境介绍如下。
41.如图所示,图1示出了电子设备100的结构示意图。电子设备100可以包括处理器110、外部存储器接口120、内部存储器121、通用串行总线(universal serial bus,usb)接口130、充电管理模块140、电源管理模块141、电池142、天线1、天线2、移动通信模块150、无线通信模块160、音频模块170、扬声器170a、受话器170b、麦克风170c、耳机接口170d、传感器模块180、指南针190、马达191、指示器192、摄像头193、显示屏194以及用户标识模块(subscriber identification module,sim)卡接口195等。
42.可以理解的是,本技术实施例示意的结构并不构成对电子设备100的具体限定。在本技术另一些实施例中,电子设备100可以包括比图示更多或更少的部件,或者组合某些部件,或者拆分某些部件,或者不同的部件布置。图示的部件可以以硬件,软件或软件和硬件的组合实现。
43.处理器110可以包括一个或多个处理单元,例如:处理器110可以包括应用处理器ap,调制解调处理器,图形处理器gpu,图像信号处理器(image signal processor,isp),控制器,视频编解码器,数字信号处理器(digital signal processor,dsp),基带处理器,和/或神经网络处理器npu等。其中,不同的处理单元可以是独立的部件,也可以集成在一个或多个处理器中。在一些实施例中,电子设备100也可以包括一个或多个处理器110。其中,控制器可以根据指令操作码和时序信号,产生操作控制信号,完成取指令和执行指令的控制。在其他一些实施例中,处理器110中还可以设置存储器,用于存储指令和数据。示例性地,处理器110中的存储器可以为高速缓冲存储器。该存储器可以保存处理器110刚用过或循环使
用的指令或数据。如果处理器110需要再次使用该指令或数据,可从存储器中直接调用。这样就避免了重复存取,减少了处理器110的等待时间,因而提高了电子设备100处理数据或执行指令的效率。处理器还可以包括图像处理器,图像处理器可以为图像预处理器(preprocess image signal processor,pre-isp),其可以理解为一个简化的isp,其也可以进行一些图像处理操作,例如,可以获取图像统计信息。
44.在一些实施例中,处理器110可以包括一个或多个接口。接口可以包括集成电路间(inter-integrated circuit,i2c)接口、集成电路间音频(inter-integrated circuit sound,i2s)接口、脉冲编码调制(pulse code modulation,pcm)接口、通用异步收发传输器(universal asynchronous receiver/transmitter,uart)接口、移动产业处理器接口(mobile industry processor interface,mipi)、用输入输出(general-purpose input/output,gpio)接口、sim卡接口和/或usb接口等。其中,usb接口130是符合usb标准规范的接口,具体可以是mini usb接口、micro usb接口、usb type c接口等。usb接口130可以用于连接充电器为电子设备100充电,也可以用于电子设备100与外围设备之间传输数据。该usb接口130也可以用于连接耳机,通过耳机播放音频。
45.可以理解的是,本技术实施例示意的各模块间的接口连接关系,只是示意性说明,并不构成对电子设备100的结构限定。在本技术另一些实施例中,电子设备100也可以采用上述实施例中不同的接口连接方式,或多种接口连接方式的组合。
46.充电管理模块140用于从充电器接收充电输入。其中,充电器可以是无线充电器,也可以是有线充电器。在一些有线充电的实施例中,充电管理模块140可以通过usb接口130接收有线充电器的充电输入。在一些无线充电的实施例中,充电管理模块140可以通过电子设备100的无线充电线圈接收无线充电输入。充电管理模块140为电池142充电的同时,还可以通过电源管理模块141为电子设备供电。
47.电源管理模块141用于连接电池142,充电管理模块140与处理器110。电源管理模块141接收电池142和/或充电管理模块140的输入,为处理器110、内部存储器121、外部存储器、显示屏194、摄像头193和无线通信模块160等供电。电源管理模块141还可以用于监测电池容量、电池循环次数、电池健康状态(漏电,阻抗)等参数。在其他一些实施例中,电源管理模块141也可以设置于处理器110中。在另一些实施例中,电源管理模块141和充电管理模块140也可以设置于同一个器件中。
48.电子设备100的无线通信功能可以通过天线1、天线2、移动通信模块150、无线通信模块160、调制解调处理器以及基带处理器等实现。
49.天线1和天线2用于发射和接收电磁波信号。电子设备100中的每个天线可用于覆盖单个或多个通信频带。不同的天线还可以复用,以提高天线的利用率。例如:可以将天线1复用为无线局域网的分集天线。在另外一些实施例中,天线可以和调谐开关结合使用。
50.移动通信模块150可以提供应用在电子设备100上的包括2g/3g/4g/5g/6g等无线通信的解决方案。移动通信模块150可以包括至少一个滤波器,开关,功率放大器,低噪声放大器(low noise amplifier,lna)等。移动通信模块150可以由天线1接收电磁波,并对接收的电磁波进行滤波,放大等处理,传送至调制解调处理器进行解调。移动通信模块150还可以对经调制解调处理器调制后的信号放大,经天线1转为电磁波辐射出去。在一些实施例中,移动通信模块150的至少部分功能模块可以被设置于处理器110中。在一些实施例中,移
动通信模块150的至少部分功能模块可以与处理器110的至少部分模块被设置在同一个器件中。
51.无线通信模块160可以提供应用在电子设备100上的包括无线局域网(wireless local area networks,wlan)(如无线保真(wireless fidelity,wi-fi)网络)、蓝牙(blue tooth,bt),全球导航卫星系统(global navigation satellite system,gnss)、调频(frequency modulation,fm)、近距离无线通信技术(near field communication,nfc)、红外技术(infrared,ir)等无线通信的解决方案。无线通信模块160可以是集成至少一个通信处理模块的一个或多个器件。无线通信模块160经由天线2接收电磁波,将电磁波信号调频以及滤波处理,将处理后的信号发送到处理器110。无线通信模块160还可以从处理器110接收待发送的信号,对其进行调频,放大,经天线2转为电磁波辐射出去。
52.电子设备100通过gpu,显示屏194,以及应用处理器等实现显示功能。gpu为图像处理的微处理器,连接显示屏194和应用处理器。gpu用于执行数学和几何计算,用于图形渲染。处理器110可包括一个或多个gpu,其执行程序指令以生成或改变显示信息。
53.显示屏194用于显示图像、视频等。显示屏194包括显示面板。显示面板可以采用液晶显示屏(liquid crystal display,lcd)、有机发光二极管(organic light-emitting diode,oled)、有源矩阵有机发光二极体或主动矩阵有机发光二极体(active-matrix organic light emitting diode的,amoled)、柔性发光二极管(flex light-emitting diode,fled)、迷你发光二极管(mini light-emitting diode,miniled)、microled、micro-oled、量子点发光二极管(quantum dot light emitting diodes,qled)等。在一些实施例中,电子设备100可以包括1个或多个显示屏194。
54.电子设备100可以通过isp、摄像头193、视频编解码器、gpu、显示屏194以及应用处理器等实现拍摄功能。
55.isp用于处理摄像头193反馈的数据。例如,拍照时,打开快门,光线通过镜头被传递到摄像头感光元件上,光信号转换为电信号,摄像头感光元件将电信号传递给isp处理,转化为肉眼可见的图像。isp还可以对图像的噪点、亮度、肤色进行算法优化。isp还可以对拍摄场景的曝光、色温等参数优化。在一些实施例中,isp可以设置在摄像头193中。
56.摄像头193用于捕获静态图像或视频。物体通过镜头生成光学图像投射到感光元件。感光元件可以是电荷耦合器件(charge coupled device,ccd)或互补金属氧化物半导体(complementary metal-oxide-semiconductor,cmos)光电晶体管。感光元件把光信号转换成电信号,之后将电信号传递给isp转换成数字图像信号。isp将数字图像信号输出到dsp加工处理。dsp将数字图像信号转换成标准的rgb,yuv等格式的图像信号。在一些实施例中,电子设备100可以包括1个或多个摄像头193。
57.数字信号处理器用于处理数字信号,除了可以处理数字图像信号,还可以处理其他数字信号。例如,当电子设备100在频点选择时,数字信号处理器用于对频点能量进行傅里叶变换等。
58.视频编解码器用于对数字视频压缩或解压缩。电子设备100可以支持一种或多种视频编解码器。这样,电子设备100可以播放或录制多种编码格式的视频,例如:动态图像专家组(moving picture experts group,mpeg)1、mpeg2、mpeg3、mpeg4等。
59.npu为神经网络(neural-network,nn)计算处理器,通过借鉴生物神经网络结构,
例如借鉴人脑神经元之间传递模式,对输入信息快速处理,还可以不断的自学习。通过npu可以实现电子设备100的智能认知等应用,例如:图像识别、人脸识别、语音识别、文本理解等。
60.外部存储器接口120可以用于连接外部存储卡,例如micro sd卡,实现扩展电子设备100的存储能力。外部存储卡通过外部存储器接口120与处理器110通信,实现数据存储功能。例如将音乐,视频等文件保存在外部存储卡中。
61.内部存储器121可以用于存储一个或多个计算机程序,该一个或多个计算机程序包括指令。处理器110可以通过运行存储在内部存储器121的上述指令,从而使得电子设备100执行本技术一些实施例中所提供的显示页面元素的方法,以及各种应用以及数据处理等。内部存储器121可以包括存储程序区和存储数据区。其中,存储程序区可存储操作系统;该存储程序区还可以存储一个或多个应用(比如图库、联系人等)等。存储数据区可存储电子设备100使用过程中所创建的数据(比如照片,联系人等)等。此外,内部存储器121可以包括高速随机存取存储器,还可以包括非易失性存储器,例如一个或多个磁盘存储部件,闪存部件,通用闪存存储器(universal flash storage,ufs)等。在一些实施例中,处理器110可以通过运行存储在内部存储器121的指令,和/或存储在设置于处理器110中的存储器的指令,来使得电子设备100执行本技术实施例中所提供的显示页面元素的方法,以及其他应用及数据处理。电子设备100可以通过音频模块170、扬声器170a、受话器170b、麦克风170c、耳机接口170d、以及应用处理器等实现音频功能。例如音乐播放、录音等。
62.传感器模块180可以包括压力传感器180a、陀螺仪传感器180b、气压传感器180c、磁传感器180d、加速度传感器180e、距离传感器180f、接近光传感器180g、指纹传感器180h、温度传感器180j、触摸传感器180k、环境光传感器180l、骨传导传感器180m等。
63.其中,压力传感器180a用于感受压力信号,可以将压力信号转换成电信号。在一些实施例中,压力传感器180a可以设置于显示屏194。压力传感器180a的种类很多,如电阻式压力传感器,电感式压力传感器,电容式压力传感器等。电容式压力传感器可以是包括至少两个具有导电材料的平行板。当有力作用于压力传感器180a,电极之间的电容改变。电子设备100根据电容的变化确定压力的强度。当有触摸操作作用于显示屏194,电子设备100根据压力传感器180a检测触摸操作强度。电子设备100也可以根据压力传感器180a的检测信号计算触摸的位置。在一些实施例中,作用于相同触摸位置,但不同触摸操作强度的触摸操作,可以对应不同的操作指令。例如:当有触摸操作强度小于第一压力阈值的触摸操作作用于短消息应用图标时,执行查看短消息的指令。当有触摸操作强度大于或等于第一压力阈值的触摸操作作用于短消息应用图标时,执行新建短消息的指令。
64.陀螺仪传感器180b可以用于确定电子设备100的运动姿态。在一些实施例中,可以通过陀螺仪传感器180b确定电子设备100围绕三个轴(即x、y和z轴)的角速度。陀螺仪传感器180b可以用于拍摄防抖。示例性的,当按下快门,陀螺仪传感器180b检测电子设备100抖动的角度,根据角度计算出镜头模组需要补偿的距离,让镜头通过反向运动抵消电子设备100的抖动,实现防抖。陀螺仪传感器180b还可以用于导航,体感游戏场景。
65.加速度传感器180e可检测电子设备100在各个方向上(一般为三轴)加速度的大小。当电子设备100静止时可检测出重力的大小及方向。还可以用于识别电子设备姿态,应用于横竖屏切换,计步器等应用。
66.环境光传感器180l用于感知环境光亮度。电子设备100可以根据感知的环境光亮度自适应调节显示屏194亮度。环境光传感器180l也可用于拍照时自动调节白平衡。环境光传感器180l还可以与接近光传感器180g配合,检测电子设备100是否在口袋里,以防误触。
67.指纹传感器180h用于采集指纹。电子设备100可以利用采集的指纹特性实现指纹解锁,访问应用锁,指纹拍照,指纹接听来电等。
68.温度传感器180j用于检测温度。在一些实施例中,电子设备100利用温度传感器180j检测的温度,执行温度处理策略。例如,当温度传感器180j上报的温度超过阈值,电子设备100执行降低位于温度传感器180j附近的处理器的性能,以便降低功耗实施热保护。在另一些实施例中,当温度低于另一阈值时,电子设备100对电池142加热,以避免低温导致电子设备100异常关机。在其他一些实施例中,当温度低于又一阈值时,电子设备100对电池142的输出电压执行升压,以避免低温导致的异常关机。
69.触摸传感器180k,也称“触控面板”。触摸传感器180k可以设置于显示屏194,由触摸传感器180k与显示屏194组成触摸屏,也称“触控屏”。触摸传感器180k用于检测作用于其上或附近的触摸操作。触摸传感器可以将检测到的触摸操作传递给应用处理器,以确定触摸事件类型。可以通过显示屏194提供与触摸操作相关的视觉输出。在另一些实施例中,触摸传感器180k也可以设置于电子设备100的表面,与显示屏194所处的位置不同。
70.示例性的,图2示出了电子设备100的软件结构框图。分层架构将软件分成若干个层,每一层都有清晰的角色和分工。层与层之间通过软件接口通信。在一些实施例中,将android系统分为四层,从上至下分别为应用程序层,应用程序框架层,安卓运行时(android runtime)和系统库,以及内核层。应用程序层可以包括一系列应用程序包。
71.如图2所示,应用程序层可以包括相机,图库,日历,通话,地图,导航,wlan,蓝牙,音乐,视频,短信息等应用程序。
72.应用程序框架层为应用程序层的应用程序提供应用编程接口(application programming interface,api)和编程框架。应用程序框架层包括一些预先定义的函数。
73.如图2所示,应用程序框架层可以包括窗口管理器,内容提供器,视图系统,电话管理器,资源管理器,通知管理器等。
74.窗口管理器用于管理窗口程序。窗口管理器可以获取显示屏大小,判断是否有状态栏,锁定屏幕,截取屏幕等。
75.内容提供器用来存放和获取数据,并使这些数据可以被应用程序访问。数据可以包括视频,图像,音频,拨打和接听的电话,浏览历史和书签,电话簿等。
76.视图系统包括可视控件,例如显示文字的控件,显示图片的控件等。视图系统可用于构建应用程序。显示界面可以由一个或多个视图组成的。例如,包括短信通知图标的显示界面,可以包括显示文字的视图以及显示图片的视图。
77.电话管理器用于提供电子设备100的通信功能。例如通话状态的管理(包括接通,挂断等)。
78.资源管理器为应用程序提供各种资源,比如本地化字符串,图标,图片,布局文件,视频文件等等。
79.通知管理器使应用程序可以在状态栏中显示通知信息,可以用于传达告知类型的消息,可以短暂停留后自动消失,无需用户交互。比如通知管理器被用于告知下载完成,消
息提醒等。通知管理器还可以是以图表或者滚动条文本形式出现在系统顶部状态栏的通知,例如后台运行的应用程序的通知,还可以是以对话窗口形式出现在屏幕上的通知。例如在状态栏提示文本信息,发出提示音,电子设备振动,指示灯闪烁等。
80.android runtime包括核心库和虚拟机。android runtime负责安卓系统的调度和管理。
81.核心库包含两部分:一部分是java语言需要调用的功能函数,另一部分是安卓的核心库。
82.应用程序层和应用程序框架层运行在虚拟机中。虚拟机将应用程序层和应用程序框架层的java文件执行为二进制文件。虚拟机用于执行对象生命周期的管理,堆栈管理,线程管理,安全和异常的管理,以及垃圾回收等功能。
83.系统库可以包括多个功能模块。例如:表面管理器(surface manager),媒体库(media libraries),三维图形处理库(例如:opengl es),2d图形引擎(例如:sgl)等。
84.表面管理器用于对显示子系统进行管理,并且为多个应用程序提供了2d和3d图层的融合。
85.媒体库支持多种常用的音频,视频格式回放和录制,以及静态图像文件等。媒体库可以支持多种音视频编码格式,例如:mpeg4,h.264,mp3,aac,amr,jpg,png等。
86.三维图形处理库用于实现三维图形绘图,图像渲染,合成,和图层处理等。
87.2d图形引擎是2d绘图的绘图引擎。
88.内核层是硬件和软件之间的层。内核层至少包含显示驱动,摄像头驱动,音频驱动,传感器驱动。
89.第二部分,本技术实施例所公开的信号处理方法及相关装置介绍如下。
90.请参阅图3a,图3a是本技术实施例提供的一种信号处理方法的流程示意图,如图所示,本信号处理方法包括:
91.301、对参考信号进行信道估计,得到信道估计结果。
92.具体实现中,参考信号(reference signal,rs)就是"导频"信号,是由发射端提供给接收端用于信道估计或信道探测的一种已知信号。
93.具体的,可以获取导频信号,对该导频信号进行载波同步,即可以得到参考信号。
94.具体实现中,可以预设信道估计算法对参考信号进行信道估计,例如,可以进行最小二乘(least square,ls)信道估计,得到信道估计结果。预设信道估计算法可以包括以下至少一种:最小均方误差(minimum mean square error,mmse)信道估计算法、ls信道估计算法、最大似然信道估计算法等等,在此不做限定。
95.302、确定所述信道估计结果的信道冲激响应cir,得到m个径的cir信号,m为正整数。
96.具体实现中,可以预设时频变换算法对信道估计结果进行时频变换,其中,预设时频变换算法用于实现时频变换功能,预设时频变换算法可以包括以下至少一种:逆离散傅里叶变换(inverse discrete fourier transform,idft)、神经网络模型、小波变换等等,在此不做限定,其中,神经网络模型可以包括以下至少一种:卷积神经网络模型、全连接神经网络模型、循环神经网络模型等等,在此不做限定。进而,在时频变换之后,可以得到信道估计结果的信道冲激响应(channel impulse response,cir),即得到m个径的cir信号,m为
正整数。当然,时延拓展决定径的数量。
97.具体的,假设接收机的接收天线数为n,n为正整数,接收到的参考信号的ls估计为h
ls
(l,f),经过时频变换得到cir信号,即h
cir
(l,τ)。
98.h
cir
(l,τ)=idft(h
ls
(l,f))
99.其中,idft(
·
)为逆离散傅里叶变换,其为一种时频变换。f为频率资源索引,τ为时延,l为符号索引(l=1,2.),且两个符号之间的时间距离为t。另外,还可以设cir上的噪声功率为δ2。
100.303、对所述m个径的cir信号中每一个径的cir信号进行多普勒扩展估计,得到m个多普勒扩展估计值。
101.具体实现中,由于每个径具有不同的时域变化特征,即不同的径具有不同的多普勒扩展和残余频率误差,因此,本技术实施例中,可以m个径的cir信号中每一个径的cir信号进行多普勒扩展估计,得到m个多普勒扩展估计值。
102.可选的,上述步骤304,对所述m个径的cir信号中每一个径的cir信号进行多普勒扩展估计,得到m个多普勒扩展估计值,可以包括如下步骤:
103.31、确定第一cir信号中符合预设要求的样点,得到一组样点,所述第一cir信号为m个径的cir信号中任一径的cir信号;
104.32、根据所述一组样点确定互相关值和自相关值;
105.33、根据所述互相关值和所述自相关值进行多普勒扩展估计,得到所述第一cir信号的多普勒扩展估计值。
106.其中,预设要求可以预先设置或者系统默认,预设要求可以为数量上的要求,例如,预设数量;或者,预设要求可以为数值上的要求,例如,幅值需要大于某个阈值,或者,能量值需要大于某个阈值。
107.具体实现中,针对任一cir信号,则可以在h
cir
(l,τ)中挑选能量或者幅值较大的m组样点,即τ=ci,i=1,...,m,即每个径对应一组样点。针对每个组样点分别计算互相关值和自相关值,具体如下:
108.r
it
=h
cir
(1,ci)*conj(h
cir
(2,ci)),i=1,...,m
109.其中,r
it
为第i组样本的互相关值,conj(
·
)为求复共轭的函数。
[0110][0111]
其中,r
i0
为第i组样本的自相关值,conj(
·
)为求复共轭的函数。
[0112]
当然,也可以在r
i0
中去除噪声的影响,具体如下:
[0113][0114]
其中,为去除噪声的自相关值。
[0115]
进而,可以基于互相关值和去除噪声后的自相关值或者未去除噪声的自相关值进行多普勒扩展估计,得到第一cir信号的多普勒扩展估计值。
[0116]
可选的,上述步骤33,根据所述互相关值和所述自相关值进行多普勒扩展估计,得到所述第一cir信号的多普勒扩展估计值,可以包括如下步骤:
[0117]
331、根据所述互相关值确定残余频率误差;
[0118]
332、根据所述残余频率误差、所述互相关值和所述自相关值进行多普勒扩展估计,得到参考多普勒扩展估计值;
[0119]
333、获取所述参考信号的目标信道模型;
[0120]
334、根据所述参考多普勒扩展估计值确定与所述目标信道模型对应的多普勒扩展估计,得到所述第一cir信号的多普勒扩展估计值。
[0121]
其中,具体实现中,可以按照如下公式根据互相关值确定残余频率误差:
[0122][0123]
其中,fi表示第i个组样本的残余频率误差,angel(
·
)为计算相位运算,r
it
为第i组样本的互相关值。
[0124]
进一步的,可以按照如下公式实现根据残余频率误差、互相关值和自相关值进行多普勒扩展估计,得到参考多普勒扩展估计值:
[0125][0126]
其中,ei表示参考多普勒扩展估计值,real(
·
)为取实数运算,arccos(
·
)为反余弦函数。由于联合估计载波频率误差和多普勒扩展,能得到更精确的估计值。
[0127]
具体实现中,不同的信道模型,则其对应的多普勒扩展估计值也会不同,进而,可以获取参考信号的目标信道模型,该目标信道模型可以为jacks信道模型中的任意模型,或者,3d信道模型中的任意模型,再按照如下公式,根据参考多普勒扩展估计值确定与目标信道模型对应的多普勒扩展估计,得到第一cir信号的多普勒扩展估计值,具体如下:
[0128][0129]
其中,di表示第i组样本最终的多普勒扩展估计值。由于对cir上的径分别进行估计,则多普勒扩展估计值能更精确地识别信道的时域变化特征。
[0130]
具体实现中,信道模型可以在接收机中提前设置,例如,可以在执行本技术实施例之前,预先设置信道模型;也可以根据在接收机中实时判断,即在确定多普勒扩展估计值的过程中,识别信道模型。
[0131]
可选的,上述步骤31,确定第一cir信号中符合预设要求的样点,得到一组样点,可以按照如下方式实施:
[0132]
选取所述第一cir信号中能量大于第一预设阈值的样点,得到所述一组样点;
[0133]
或者,
[0134]
选取所述第一cir信号中幅值大于第二预设阈值的样点,得到所述一组样点。
[0135]
其中,第一预设阈值、第二预设阈值均可以预先设置或者系统默认。具体实现中,幅值较大或者能量值越大,则代表信号冗余性大,信号好。
[0136]
具体的,可以选取第一cir信号中能量大于第一预设阈值的样点,得到一组样点,如此,可以得到信号好的样点;或者,也可以选取第一cir信号中幅值大于第二预设阈值的样点,得到一组样点,可以得到信号好的样点。
[0137]
304、根据所述m个多普勒扩展估计值确定各个径的时域相关性,得到m个时域相关
性。
[0138]
具体实现中,由于每个径具有不同的时域变化特征,即不同的径具有不同的多普勒扩展和残余频率误差,因此,可以根据m个多普勒扩展估计值确定各个径的时域相关性,得到m个时域相关性,即可以得到与各个径的时域变化特征对应的时域相关性。
[0139]
可选的,所述根据所述m个多普勒扩展估计值确定各个径的时域相关性,得到m个时域相关性,包括:
[0140]
根据所述m个多普勒扩展估计值中的每一多普勒扩展估计值以及对应的残余频率误差进行时域相关性计算,得到所述m个时域相关性。
[0141]
具体实现中,可以基于各径估计得到的多普勒扩展和残余频率误差,分别计算时域相关性,具体如下:
[0142]ri
=corrcal(di,fi)
[0143]
其中,corrcal(
·
)为时域相关性计算函数,具体实现中,其计算可以基于jakes信道模型,也可以基于3d信道模型,具体依据实际信道模型而定。
[0144]
305、将所述m个时域相关性进行合并,得到目标时域相关性。
[0145]
具体实现中,由于m个时域相关性中的每一时域相关性均反映了对应径的时域变化特征,再将m个时域相关性进行合并,得到目标时域相关性,可以得到精准的时域相关性。
[0146]
可选的,上述步骤305,将所述m个时域相关性进行合并,得到目标时域相关性,可以包括如下步骤:
[0147]
51、确定所述m个时域相关性中的每一时域相关性对应径的能量值,得到m个能量值;
[0148]
52、根据所述m个能量值确定所述m个时域相关性中的每一时域相关性对应径的权值,得到m个权值;
[0149]
53、根据所述m个时域相关性和所述m个权值进行加权运算,得到所述目标时域相关性。
[0150]
其中,具体实现中,可以确定m个时域相关性中的每一时域相关性对应径的能量值,得到m个能量值,例如,pi表示第i个径的能量值,i为m个径中的任一个径。进而,可以根据m个能量值确定m个时域相关性中的每一时域相关性对应径的权值,得到m个权值,即接着,可以根据m个时域相关性中的每一个时域相关性与对应的权值进行加权运算,得到目标时域相关性r
final
。如此,可以针对各个径的特性来分配相应的时域相关性的权重,进而,使得最终的时域相关性深度符合信号特性,有助于提升时域相关性的精准度。
[0151]
当然,也可以对各径计算得到的ri进行合并,具体如下:
[0152][0153]
其中,pi为各径的能量,r
final
为最终计算得到的时域相关性。
[0154]
本技术实施例中,基于cir上的不同径,分别联合估计残余频率误差和多普勒扩展,继而分别计算不同径上的时域相关性函数,将各径的时域相关性合并,得到最终的时域相关性。
[0155]
可选的,还可以包括如下步骤:
[0156]
a1、根据所述目标时域相关性确定维纳滤波系数;
[0157]
a2、根据所述维纳滤波系数对所述信道估计结果进行时域滤波,得到信道估计输出结果。
[0158]
具体的,可以基于r
final
,进行时域维纳滤波系数计算,从而进行时域信道滤波,并输出滤波后结果。
[0159]
具体实现中,如图3b所示,可以接收导频信号,到该导频信号进行载波同步,得到参考信号,对该参考信号进行ls估计,计算cir,基于不同径分别计算多普勒信息,再基于多普勒信息计算时域相关性,接着,合并不同径的时域相关性,基于合并后的时域相关性进行时域维纳滤波,输出滤波后结果,即实现信道估计输出。
[0160]
另外,相关技术中,如图3c所示,可以接收导频信号,到该导频信号进行载波同步,得到参考信号,对该参考信号进行ls估计,计算cir,估计多普勒扩展,基于多普勒扩展实现时域相关性计算,再进行时域维纳滤波,输出滤波后结果。
[0161]
即,接收机接收信号时,需要和发射机进行载波频率同步,从而正确解调信号。但当发射机或者接收机快速移动时,由于多普勒效应,接收机和发射机不能完美同步,会有残余同步误差。残余频率同步误差会影响多普勒扩展的估计。
[0162]
在相关技术的接收机中,通常是基于导频的ls估计,然后,做时频变换得到cir,基于cir估计多普勒扩展。基于估计得到多普勒扩展,计算时域相关性函数,从而,对导频的ls估计值进行时域维纳滤波。
[0163]
但是,在实际信道中,发射机发射的无线信号经过不同的无线路径,经过周围环境的反射,折射等,最终被接收机接收到。如图3d所示,每个虚线圈表示一个径,接收机接收信号的cir上,不同的径具有不同的时域变化特征,即不同的径具有不同的多普勒扩展和残余频率误差,相关技术中的接收机将cir作为一个整体处理,并没有将不同径分别处理,另外在估计多普勒扩展时也没有考虑残余频率误差,从而,最终估计得到的时域相关性会具有较大误差。
[0164]
相对比于相关技术中的方案,本技术实施例中,由于考虑不同的径具有不同的多普勒扩展和残余频率误差,可以计算得到更准确的时域相关性,从而提升信道估计性能。尤其在快变信道场景,本技术实施例能明显提升解调性能。
[0165]
进一步的,可以通过设计输入信号,使输入信号具有不同的,特定设计的时域相关性,来观察输出的信道估计情况。通过检查输出信道估计的特征,或者,时域相关性的精准性,或者,时域相关性的变化规律,可以来推断是否使用的本技术实施例所涉及的方案。
[0166]
可以看出,本技术实施例中所描述的信号处理方法,对参考信号进行信道估计,得到信道估计结果,确定信道估计结果的信道冲激响应cir,得到m个径的cir信号,m为正整数,对m个径的cir信号中每一个径的cir信号进行多普勒扩展估计,得到m个多普勒扩展估计值,根据m个多普勒扩展估计值确定各个径的时域相关性,得到m个时域相关性,将m个时域相关性进行合并,得到目标时域相关性,由于每个径具有不同的时域变化特征,不同的径具有不同的多普勒扩展,基于不同径的多普勒扩展确定每个径的时域相关性,则每一时域相关性可以深度代表每个径的特性,再将各径的时域相关性合并,得到最终的时域相关性,进而,能够计算得到更准确的时域相关性,从而提升信道估计性能。
[0167]
与上述一致地,请参阅图4,图4是本技术实施例提供的另一种信号处理方法的流程示意图,如图所示,本信号处理方法包括:
[0168]
401、对参考信号进行信道估计,得到信道估计结果。
[0169]
402、确定所述信道估计结果的信道冲激响应cir,得到m个径的cir信号,m为正整数。
[0170]
403、对所述m个径的cir信号中每一个径的cir信号进行多普勒扩展估计,得到m个多普勒扩展估计值。
[0171]
404、根据所述m个多普勒扩展估计值确定各个径的时域相关性,得到m个时域相关性。
[0172]
405、将所述m个时域相关性进行合并,得到目标时域相关性。
[0173]
406、根据所述目标时域相关性确定维纳滤波系数。
[0174]
407、根据所述维纳滤波系数对所述信道估计结果进行时域滤波,得到信道估计输出结果。
[0175]
其中,上述步骤401-步骤407的具体描述可以参照如图3a所述的信号处理方法的相关步骤,在此不再赘述。
[0176]
可以看出,本技术实施例中所描述的信号处理方法,对参考信号进行信道估计,得到信道估计结果,确定信道估计结果的信道冲激响应cir,得到m个径的cir信号,m为正整数,对m个径的cir信号中每一个径的cir信号进行多普勒扩展估计,得到m个多普勒扩展估计值,根据m个多普勒扩展估计值确定各个径的时域相关性,得到m个时域相关性,将m个时域相关性进行合并,得到目标时域相关性,根据目标时域相关性确定维纳滤波系数,根据维纳滤波系数对信道估计结果进行时域滤波,得到信道估计输出结果,由于每个径具有不同的时域变化特征,不同的径具有不同的多普勒扩展,基于不同径的多普勒扩展确定每个径的时域相关性,则每一时域相关性可以深度代表每个径的特性,再将各径的时域相关性合并,得到最终的时域相关性,进而,能够计算得到更准确的时域相关性,从而提升信道估计性能,另外,能够提升维纳滤波效果,以及提升信号处理效果。
[0177]
与上述实施例一致地,请参阅图5,图5是本技术实施例提供的一种电子设备的结构示意图,如图所示,该电子设备包括处理器、存储器、通信接口以及一个或多个程序,其中,上述一个或多个程序被存储在上述存储器中,并且被配置由处理器执行,本技术实施例中,上述程序包括用于执行以下步骤的指令:
[0178]
对参考信号进行信道估计,得到信道估计结果;
[0179]
确定所述信道估计结果的信道冲激响应cir,得到m个径的cir信号,m为正整数;
[0180]
对所述m个径的cir信号中每一个径的cir信号进行多普勒扩展估计,得到m个多普勒扩展估计值;
[0181]
根据所述m个多普勒扩展估计值确定各个径的时域相关性,得到m个时域相关性;
[0182]
将所述m个时域相关性进行合并,得到目标时域相关性。
[0183]
可选的,在所述对所述m个径的cir信号中每一个径的cir信号进行多普勒扩展估计,得到m个多普勒扩展估计值方面,上述程序包括用于执行以下步骤的指令:
[0184]
确定第一cir信号中符合预设要求的样点,得到一组样点,所述第一cir信号为m个径的cir信号中任一径的cir信号;
[0185]
根据所述一组样点确定互相关值和自相关值;
[0186]
根据所述互相关值和所述自相关值进行多普勒扩展估计,得到所述第一cir信号的多普勒扩展估计值。
[0187]
可选的,在所述根据所述互相关值和所述自相关值进行多普勒扩展估计,得到所述第一cir信号的多普勒扩展估计值方面,上述程序包括用于执行以下步骤的指令:
[0188]
根据所述互相关值确定残余频率误差;
[0189]
根据所述残余频率误差、所述互相关值和所述自相关值进行多普勒扩展估计,得到参考多普勒扩展估计值;
[0190]
获取所述参考信号的目标信道模型;
[0191]
根据所述参考多普勒扩展估计值确定与所述目标信道模型对应的多普勒扩展估计,得到所述第一cir信号的多普勒扩展估计值。
[0192]
可选的,在所述确定第一cir信号中符合预设要求的样点,得到一组样点方面,上述程序包括用于执行以下步骤的指令:
[0193]
选取所述第一cir信号中能量大于第一预设阈值的样点,得到所述一组样点;
[0194]
或者,
[0195]
选取所述第一cir信号中幅值大于第二预设阈值的样点,得到所述一组样点。
[0196]
可选的,在所述根据所述m个多普勒扩展估计值确定各个径的时域相关性,得到m个时域相关性方面,上述程序包括用于执行以下步骤的指令:
[0197]
根据所述m个多普勒扩展估计值中的每一多普勒扩展估计值以及对应的残余频率误差进行时域相关性计算,得到所述m个时域相关性。
[0198]
可选的,在所述将所述m个时域相关性进行合并,得到目标时域相关性方面,上述程序包括用于执行以下步骤的指令:
[0199]
确定所述m个时域相关性中的每一时域相关性对应径的能量值,得到m个能量值;
[0200]
根据所述m个能量值确定所述m个时域相关性中的每一时域相关性对应径的权值,得到m个权值;
[0201]
根据所述m个时域相关性和所述m个权值进行加权运算,得到所述目标时域相关性。
[0202]
可选的,上述程序还包括用于执行以下步骤的指令:
[0203]
根据所述目标时域相关性确定维纳滤波系数;
[0204]
根据所述维纳滤波系数对所述信道估计结果进行时域滤波,得到信道估计输出结果。
[0205]
可选的,在所述电子设备为通信芯片时,所述通信芯片包括处理器和存储器,所述处理器配置成:
[0206]
对参考信号进行信道估计,得到信道估计结果;
[0207]
确定所述信道估计结果的信道冲激响应cir,得到m个径的cir信号,m为正整数;
[0208]
对所述m个径的cir信号中每一个径的cir信号进行多普勒扩展估计,得到m个多普勒扩展估计值;
[0209]
根据所述m个多普勒扩展估计值确定各个径的时域相关性,得到m个时域相关性;
[0210]
将所述m个时域相关性进行合并,得到目标时域相关性。
[0211]
可以看出,本技术实施例中所描述的电子设备,对参考信号进行信道估计,得到信道估计结果,确定信道估计结果的信道冲激响应cir,得到m个径的cir信号,m为正整数,对m个径的cir信号中每一个径的cir信号进行多普勒扩展估计,得到m个多普勒扩展估计值,根据m个多普勒扩展估计值确定各个径的时域相关性,得到m个时域相关性,将m个时域相关性进行合并,得到目标时域相关性,由于每个径具有不同的时域变化特征,不同的径具有不同的多普勒扩展,基于不同径的多普勒扩展确定每个径的时域相关性,则每一时域相关性可以深度代表每个径的特性,再将各径的时域相关性合并,得到最终的时域相关性,进而,能够计算得到更准确的时域相关性,从而提升信道估计性能。
[0212]
上述主要从方法侧执行过程的角度对本技术实施例的方案进行了介绍。可以理解的是,电子设备为了实现上述功能,其包含了执行各个功能相应的硬件结构和/或软件模块。本领域技术人员应该很容易意识到,结合本文中所提供的实施例描述的各示例的单元及算法步骤,本技术能够以硬件或硬件和计算机软件的结合形式来实现。某个功能究竟以硬件还是计算机软件驱动硬件的方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用使用不同方法来实现所描述的功能,但是这种实现不应认为超出本技术的范围。
[0213]
本技术实施例可以根据上述方法示例对电子设备进行功能单元的划分,例如,可以对应各个功能划分各个功能单元,也可以将两个或两个以上的功能集成在一个处理单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。需要说明的是,本技术实施例中对单元的划分是示意性的,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式。
[0214]
图6是本技术实施例中所涉及的信号处理装置600的功能单元组成框图。该信号处理装置600应用于电子设备,所述装置600包括:信道估计单元601、确定单元602和合并单元603,其中,
[0215]
所述信道估计单元601,用于对参考信号进行信道估计,得到信道估计结果;
[0216]
所述确定单元602,用于确定所述信道估计结果的信道冲激响应cir,得到m个径的cir信号,m为正整数;对所述m个径的cir信号中每一个径的cir信号进行多普勒扩展估计,得到m个多普勒扩展估计值;以及根据所述m个多普勒扩展估计值确定各个径的时域相关性,得到m个时域相关性;
[0217]
所述合并单元603,用于将所述m个时域相关性进行合并,得到目标时域相关性。
[0218]
可选的,在所述对所述m个径的cir信号中每一个径的cir信号进行多普勒扩展估计,得到m个多普勒扩展估计值方面,所述确定单元602,具体用于:
[0219]
确定第一cir信号中符合预设要求的样点,得到一组样点,所述第一cir信号为m个径的cir信号中任一径的cir信号;
[0220]
根据所述一组样点确定互相关值和自相关值;
[0221]
根据所述互相关值和所述自相关值进行多普勒扩展估计,得到所述第一cir信号的多普勒扩展估计值。
[0222]
可选的,在所述根据所述互相关值和所述自相关值进行多普勒扩展估计,得到所述第一cir信号的多普勒扩展估计值方面,所述确定单元602,具体用于:
[0223]
根据所述互相关值确定残余频率误差;
[0224]
根据所述残余频率误差、所述互相关值和所述自相关值进行多普勒扩展估计,得到参考多普勒扩展估计值;
[0225]
获取所述参考信号的目标信道模型;
[0226]
根据所述参考多普勒扩展估计值确定与所述目标信道模型对应的多普勒扩展估计,得到所述第一cir信号的多普勒扩展估计值。
[0227]
可选的,在所述确定第一cir信号中符合预设要求的样点,得到一组样点方面,所述确定单元602,具体用于:
[0228]
选取所述第一cir信号中能量大于第一预设阈值的样点,得到所述一组样点;
[0229]
或者,
[0230]
选取所述第一cir信号中幅值大于第二预设阈值的样点,得到所述一组样点。
[0231]
可选的,在所述根据所述m个多普勒扩展估计值确定各个径的时域相关性,得到m个时域相关性方面,所述确定单元602,具体用于:
[0232]
根据所述m个多普勒扩展估计值中的每一多普勒扩展估计值以及对应的残余频率误差进行时域相关性计算,得到所述m个时域相关性。
[0233]
可选的,在所述将所述m个时域相关性进行合并,得到目标时域相关性方面,所述合并单元603,具体用于:
[0234]
确定所述m个时域相关性中的每一时域相关性对应径的能量值,得到m个能量值;
[0235]
根据所述m个能量值确定所述m个时域相关性中的每一时域相关性对应径的权值,得到m个权值;
[0236]
根据所述m个时域相关性和所述m个权值进行加权运算,得到所述目标时域相关性。
[0237]
可选的,所述装置600还具体用于:
[0238]
根据所述目标时域相关性确定维纳滤波系数;
[0239]
根据所述维纳滤波系数对所述信道估计结果进行时域滤波,得到信道估计输出结果。
[0240]
可以看出,本技术实施例中所描述的信号处理装置,对参考信号进行信道估计,得到信道估计结果,确定信道估计结果的信道冲激响应cir,得到m个径的cir信号,m为正整数,对m个径的cir信号中每一个径的cir信号进行多普勒扩展估计,得到m个多普勒扩展估计值,根据m个多普勒扩展估计值确定各个径的时域相关性,得到m个时域相关性,将m个时域相关性进行合并,得到目标时域相关性,由于每个径具有不同的时域变化特征,不同的径具有不同的多普勒扩展,基于不同径的多普勒扩展确定每个径的时域相关性,则每一时域相关性可以深度代表每个径的特性,再将各径的时域相关性合并,得到最终的时域相关性,进而,能够计算得到更准确的时域相关性,从而提升信道估计性能。
[0241]
需要注意的是,本技术实施例所描述的电子设备是以功能单元的形式呈现。这里所使用的术语“单元”应当理解为尽可能最宽的含义,用于实现各个“单元”所描述功能的对象例如可以是集成电路asic,单个电路,用于执行一个或多个软件或固件程序的处理器(共享的、专用的或芯片组)和存储器,组合逻辑电路,和/或提供实现上述功能的其他合适的组件。
[0242]
其中,信道估计单元601、确定单元602和合并单元603可以是处理器,该处理器可
以为人工智能芯片、npu、cpu、gpu等等,在此不做限定。基于上述单元模块能够实现上述任一方法的功能或者步骤。
[0243]
本实施例还提供了一种计算机可读存储介质,其中,该计算机可读存储介质存储用于电子数据交换的计算机程序,其中,上述计算机程序使得计算机执行如本技术实施例,以用于实现上述实施例中的任一方法。
[0244]
本实施例还提供了一种计算机程序产品,当该计算机程序产品在计算机上运行时,使得计算机执行上述相关步骤,以实现上述实施例中的任一方法。
[0245]
另外,本技术的实施例还提供一种信号处理装置,这个装置具体可以是芯片,组件或模块,该装置可包括相连的处理器和存储器;其中,存储器用于存储计算机执行指令,当装置运行时,处理器可执行存储器存储的计算机执行指令,以使芯片执行上述各方法实施例中的任一方法。
[0246]
其中,本实施例提供的电子设备、计算机存储介质、计算机程序产品或芯片均用于执行上文所提供的对应的方法,因此,其所能达到的有益效果可参考上文所提供的对应的方法中的有益效果,此处不再赘述。
[0247]
通过以上实施方式的描述,所属领域的技术人员可以了解到,为描述的方便和简洁,仅以上述各功能模块的划分进行举例说明,实际应用中,可以根据需要而将上述功能分配由不同的功能模块完成,即将装置的内部结构划分成不同的功能模块,以完成以上描述的全部或者部分功能。
[0248]
在本技术所提供的几个实施例中,应该理解到,所揭露的装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,模块或单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个装置,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
[0249]
作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是一个物理单元或多个物理单元,即可以位于一个地方,或者也可以分布到多个不同地方。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
[0250]
另外,在本技术各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。
[0251]
集成的单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个可读取存储介质中。基于这样的理解,本技术实施例的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来,该软件产品存储在一个存储介质中,包括若干指令用以使得一个设备(可以是单片机,芯片等)或处理器(processor)执行本技术各个实施例方法的全部或部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器(read only memory,rom)、随机存取存储器(random access memory,ram)、磁碟或者光盘等各种可以存储程序代码的介质。
[0252]
以上内容,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何
熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。