1.本发明涉及客流相机技术领域,尤其涉及一种人员身高的计算方法、装置、电子设备及存储介质。
背景技术:
2.客流相机是指相机能够自动的、实时的分析所拍摄的视频流,从而输出进出规定区域的顾客信息的一类相机,比如分析并输出某个门店的进出人次,人员身高,是否戴口罩,是否戴帽子等属性。而计算客流量中人员身高是客流相机的一个重要人体属性和指标。
3.现有的技术一般是通过2d图像的点求脚点和头点的距离,再加上头顶和头点的误差得到。但2d图像是由3d世界坐标系经过相机投影到2d坐标系统,存在视觉误差,计算结果准确度低。可见,在现有的客流相机对人员身高进行计算时存在准确度低的问题。
技术实现要素:
4.本发明实施例提供一种人员身高的计算方法,旨在解决在现有的客流相机对人员身高进行计算时存在准确度低的问题。
5.第一方面,本发明实施例提供一种人员身高的计算方法,所述方法包括以下步骤:
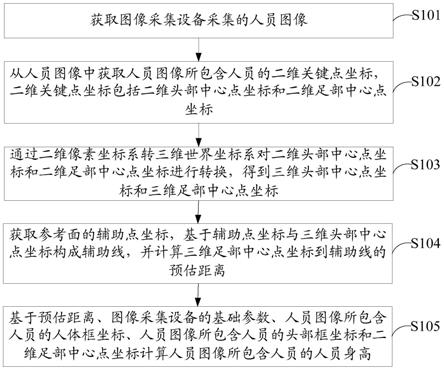
6.获取图像采集设备采集的人员图像;
7.从所述人员图像中获取所述人员图像所包含人员的二维关键点坐标,所述二维关键点坐标包括二维头部中心点坐标和二维足部中心点坐标;
8.通过二维像素坐标系转三维世界坐标系对所述二维头部中心点坐标和所述二维足部中心点坐标进行转换,得到三维头部中心点坐标和三维足部中心点坐标;
9.获取参考面的辅助点坐标,基于所述辅助点坐标与所述三维头部中心点坐标构成辅助线,并计算所述三维足部中心点坐标到所述辅助线的预估距离;
10.基于所述预估距离、所述图像采集设备的基础参数、所述人员图像所包含人员的人体框坐标、所述人员图像所包含人员的头部框坐标和所述二维足部中心点坐标计算所述人员图像所包含人员的人员身高。
11.第二方面,本发明实施例提供一种人员身高的计算装置,包括:
12.第一获取模块,用于获取图像采集设备采集的人员图像;
13.第二获取模块,用于从所述人员图像中获取所述人员图像所包含人员的二维关键点坐标,所述二维关键点坐标包括二维头部中心点坐标和二维足部中心点坐标;
14.转换模块,用于通过二维像素坐标系转三维世界坐标系对所述二维头部中心点坐标和所述二维足部中心点坐标进行转换,得到三维头部中心点坐标和三维足部中心点坐标;
15.第一计算模块,用于获取参考面的辅助点坐标,基于所述辅助点坐标与所述三维头部中心点坐标构成辅助线,并计算所述三维足部中心点坐标到所述辅助线的预估距离;
16.第二计算模块,用于基于所述预估距离、所述图像采集设备的基础参数、所述人员
图像所包含人员的人体框坐标、所述人员图像所包含人员的头部框坐标和所述二维足部中心点坐标计算所述人员图像所包含人员的人员身高。
17.第三方面,一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现本发明实施例提供的一种人员身高的计算方法中的步骤。
18.第四方面,一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现本发明实施例提供的一种人员身高的计算方法中的步骤。
19.在本发明实施例中,由于通过获取图像采集设备采集的人员图像;从所述人员图像中获取所述人员图像所包含人员的二维关键点坐标,所述二维关键点坐标包括二维头部中心点坐标和二维足部中心点坐标;通过二维像素坐标系转三维世界坐标系对所述二维头部中心点坐标和所述二维足部中心点坐标进行转换,得到三维头部中心点坐标和三维足部中心点坐标;获取参考面的辅助点坐标,基于所述辅助点坐标与所述三维头部中心点坐标构成辅助线,并计算所述三维足部中心点坐标到所述辅助线的预估距离;基于所述预估距离、所述图像采集设备的基础参数、所述人员图像所包含人员的人体框坐标、所述人员图像所包含人员的头部框坐标和所述二维足部中心点坐标计算所述人员图像所包含人员的人员身高。本技术通过获取图像采集设备中采集到的人员图像后,获取图像中人员的二维头部中心点坐标和二维足部中心点坐标,然后经过二维像素坐标系转三维世界坐标系的方式获取到三维头部中心点坐标和三维足部中心点坐标,并通过选取辅助点坐标的方式计算预估距离之后再计算人员身高,通过这样的估算方法其视觉差异小、计算得到的人员身高准确度更高。
附图说明
20.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
21.图1是本发明实施例提供的一种人员身高的计算方法的流程图;
22.图2是本发明实施例提供的另一种人员身高的计算方法的流程图;
23.图3是本发明实施例提供的图2中步骤s203的流程图;
24.图4是本发明实施例提供的一种人员身高的计算装置的结构示意图;
25.图5是本发明实施例提供的另一种人员身高的计算装置的结构示意图;
26.图6是本发明实施例提供的另一种人员身高的计算装置的结构示意图;
27.图7是本发明实施例提供的另一种人员身高的计算装置的结构示意图;
28.图8是本发明实施例提供的另一种人员身高的计算装置的结构示意图;
29.图9是本发明实施例提供的一种电子设备的结构示意图。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.本技术的说明书和权利要求书及附图说明中的术语“包括”和“具有”以及它们的任何变形,意图在于覆盖不排他的包含。本技术的说明书和权利要求书或附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序。在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
32.请参见图1,图1是本发明实施例提供的一种人员身高的计算方法的流程图,如图1所示,包括以下步骤:
33.s101、获取图像采集设备采集的人员图像。
34.在本发明实施例中,所实施一种人员身高的计算方法运用的场景包括但不限于各种商场、店铺、景区、车站,并逐渐扩大到机场、机场中转厅、停车场、健身场所等等。上述人员身高的计算方法运行于其上的电子设备可以通过有线连接方式或者无线连接方式获取人员图像等。其中,无线连接方式可以包括但不限于3g/4g连接、wifi(wireless-fidelity)连接、蓝牙连接、wimax(worldwide interoperability for microwave access)连接、zigbee(低功耗局域网协议,又称紫峰协议)连接、uwb(ultra wideband)连接、以及其他现在已知或将来开发的无线连接方式。
35.其中,上述图像采集设备可以是指客流相机,客流相机通过对基础参数进行标定后可以安装在上述商场、店铺、景区、车站等所运用的场景中的对应位置,同一场景中可以安装多个客流相机。在安装过程中,要求视野水平,即客流相机的像素坐标系中的x轴和地面水平。具体的,上述对客流相机的基础参数进行标定包括标定相机的畸变参数,当然,如果客流相机没有畸变则不用标定。上述客流相机的基础参数还包括客流相机的内参矩阵与客流相机的外参矩阵,内参矩阵与外参矩阵可用于二维像素坐标系转三维世界坐标系。
36.s102、从人员图像中获取人员图像所包含人员的二维关键点坐标,二维关键点坐标包括二维头部中心点坐标和二维足部中心点坐标。
37.其中,可以通过客流相机进行图像采集,在图像采集过程中,可以在识别范围内自动识别图像中是否存在人员图像。具体的,可以根据人体的特征进行识别,例如识别图像中是否存在人脸、人形等特征。若采集到人员图像,会输标注出人体框,人体框是指包含人员整个人体的目标框。相当于输入一张图片,识别到人体后,输出为人体框。且还可以从人体框中进一步框出头部框,头部框是指包含人员整个头部的目标框。之后通过关键点检测找到人的头部与双足,并基于人体框以及头部框分别计算出二维头部中心点坐标和二维足部中心点坐标。其中,人体框可以表示为person(x,y,w,h);头部框坐标可以表示为headrect(x,y,w,h);二维头部中心点坐标可以表示为headcenter(x,y),二维足部中心点坐标footcenter(x,y),上述括号内表示坐标,x,y分别对应为x坐标与y坐标,w与h分别对应是x坐标的宽度和y坐标的高度,单位是像素。
38.s103、通过二维像素坐标系转三维世界坐标系对二维头部中心点坐标和二维足部
中心点坐标进行转换,得到三维头部中心点坐标和三维足部中心点坐标。
39.其中,可以基于二维像素坐标系(2d(dimensions)像素坐标系)转换为三维世界坐标系(3d世界坐标系)的方式实现2d像素坐标系下二维头部中心点坐标headcenter(x,y)转换为3d世界坐标系下的三维头部中心点坐标3dhead(x,y,z),以及实现二维足部中心点坐标footcenter(x,y)转换为三维足部中心点坐标3dfoot(x,y,z)。
40.s104、获取参考面的辅助点坐标,基于辅助点坐标与三维头部中心点坐标构成辅助线,并计算三维足部中心点坐标到辅助线的预估距离。
41.其中,可以在客流相机的摄像范围内取一参考面。在本实施例中,上述的参考面可以指人员头顶之上的天花板平面,并在天花板平面取辅助点3dheadtmp(x 1,y,z),连接辅助点3dheadtmp(x 1,y,z)与三维头部中心点坐标3dhead(x,y,z)构成上述辅助线l,通过计算点到直线的距离的方式,计算三维足部中心点坐标3dfoot(x,y,z)到辅助线l的距离,该距离即为三维足部中心点坐标3dfoot(x,y,z)到三维头部中心点坐标3dhead(x,y,z)的预估距离headfootheight。
42.s105、基于预估距离、图像采集设备的基础参数、人员图像所包含人员的人体框坐标、人员图像所包含人员的头部框坐标和二维足部中心点坐标计算人员图像所包含人员的人员身高。
43.其中,人员的人员身高具体的计算公式如下所示:
44.height=headfootheight headrect.h*fy (person.y person.h-footcenter.y)*fy。
45.其中:headfootheight表示预估距离;headrect.h表示头部框坐标中的高度;fy属于相机的基础参数,是指y方向一个像素的实际距离,单位是mm;person.y表示人员图像对应的人体框坐标的y坐标值;person.h表示人体框坐标中的高度;footcenter.y表示二维足部中心点坐标中y坐标值。
46.具体的,根据上述计算公式,便可以计算出客流相机中采集到的人员图像中人员的人员身高,该人员身高不一定与人员的实际身高一致,但可做作为客流相机识别到的最优身高估计。
47.在本发明实施例中,由于通过获取图像采集设备采集的人员图像;从人员图像中获取人员图像所包含人员的二维关键点坐标,二维关键点坐标包括二维头部中心点坐标和二维足部中心点坐标;通过二维像素坐标系转三维世界坐标系对二维头部中心点坐标和二维足部中心点坐标进行转换,得到三维头部中心点坐标和三维足部中心点坐标;获取参考面的辅助点坐标,基于辅助点坐标与三维头部中心点坐标构成辅助线,并计算三维足部中心点坐标到辅助线的预估距离;基于预估距离、图像采集设备的基础参数、人员图像所包含人员的人体框坐标、人员图像所包含人员的头部框坐标和二维足部中心点坐标计算人员图像所包含人员的人员身高。可见,本技术通过2d像素坐标系转3d世界坐标系的转换方式转换得到三维头部中心点坐标和三维足部中心点坐标,转换为三维坐标可以减小视觉差异,并通过选取辅助点坐标的方式计算预估距离之后再计算人员身高,通过这样的估算方法计算得到的人员身高准确度更高。
48.请参见图2,图2是本发明实施例提供的另一种人员身高的计算方法的流程图,如图2所示,包括步骤:
49.s201、获取图像采集设备采集的人员图像。
50.s202、基于人体检测模型检测人员图像所包含人员的人体框和头部框,人体框有对应的人体框坐标,头部框有对应的头部框坐标。
51.其中,将客流相机安装好开始开启后进行图像采集,可以结合目标跟踪算法进行图像跟踪,通过客流相机的人体检测模型persondetect进行人体检测,输入一张图片,输出为人体框,把人体给框出来,人体框为矩形框,有利于坐标定位。人体检测模型persondetect可以检测图片中是否存在人体特征,例如:是否识别到头部、身体、腿、鞋子、手臂、衣服等特征。识别出为人体后会对人体进行人体框标注,并获取人体框坐标person(x,y,w,h)。
52.s203、通过人体关键点检测模型对人体框和头部框进行二维人体关键点检测,并计算得到二维头部中心点坐标和二维足部中心点坐标。
53.其中,人体关键点检测模型为预先得到的一个人体关键点模型keypoint,该关键点检测模型的输入是人体框,输出是人体的二维足部中心点坐标footcenter(x,y)。在上述在进行二维人体关键点检测过程中,同样可以通过目标跟踪算法对人员进行跟踪。标定出人体框后,可以进行人体关键点检测,获取到两足的坐标,基于两足的坐标计算两足之间的中点,即二维足部中心点坐标。此外,标定出人体框之后,可以从人体框中进行人头部检测,得到并标定头部框headrect(x,y,w,h),计算头部框的中心位置,得到二维头部中心点坐标headcenter(x,y)。
54.上述人体关键点检测模型可以检测到人员的头部、左脚踝、右脚踝、鼻子、左眼、右眼、左耳、右耳、左手腕、右手腕、左肘、右肘、左肩、右肩膀、左胯、右胯、左膝盖、右膝盖等等。根据获取到的二维关键点坐标可以进行人体估计,也即是对目标人员的当前状态下的姿态进行估计。需要说明的是,在检测过程中,检测到人体处于蹲下状态时,不进行身高检测,当检测到人体处于站立状态时才会检测,也即是会进行人体姿态估计。
55.s204、基于图像采集设备的内参矩阵,将二维像素坐标系下的二维头部中心点坐标与二维足部中心点坐标转换到二维图像坐标系下。
56.其中,在进行客流相机安装之前已经对客流相机的基础参数进行设置,且上述的客流相机的基础参数包括客流相机内参矩阵与客流相机外参矩阵。因此,可以基于客流相机的内参矩阵,根据2d像素坐标系与2d图像坐标系的转换关系,将2d像素坐标系中的二维头部中心点坐标转换到2d图像坐标系下,以及将2d像素坐标系下的二维足部中心点坐标转换到2d图像坐标系下。具体的,2d像素坐标系(u,v)和2d图像坐标系(x,y)的转换关系如下所示:
[0057][0058]
其中,等号左侧为2d像素坐标系(u,v),等号右侧为内参矩阵与2d图像坐标系(x,y)的乘积。内参矩阵中的f
x
、fy是分别指x方向和y方向一个像素的实际距离,单位为mm;c
x
和cy是2d图像坐标系(x,y)的中心到2d像素坐标系(u,v)的偏移距离,单位为mm。
[0059]
具体的,在本实施例中是将2d像素坐标系(u,v)转换成为3d世界坐标系(xc,yc,zc),所以上述2d像素坐标系(u,v)转2d图像坐标系(x,y)通过逆矩阵可以得到。客流相机的
内参矩阵为已知,将在2d像素坐标系(u,v)下二维头部中心点坐标代入可以转换得到2d图像坐标系(x,y)下的二维头部中心点坐标headcenter(x,y),以及将在2d像素坐标系(u,v)下二维足部中心点坐标代入可以转换得到2d图像坐标系(x,y)下的二维足部中心点坐标footcenter(x,y)。
[0060]
s205、基于图像采集设备的外参矩阵,将二维图像坐标系下的二维头部中心点坐标和二维足部中心点坐标转换到三维世界坐标系下,得到三维头部中心点坐标和三维足部中心点坐标。
[0061]
其中,2d图像坐标系(x,y)与3d世界坐标系(xc,yc,zc)之间的转换关系如下所示:
[0062][0063]
其中,等号左侧为2d图像坐标系(x,y),等号右侧为外参矩阵与3d世界坐标系(xc,yc,zc)的乘积。外参矩阵中的f表示客流相机的焦距zc表示相机的深度。
[0064]
上述客流相机的外参矩阵为已知数据,因此将2d图像坐标系(x,y)下的二维足部中心点坐标footcenter(x,y)与二维头部中心点坐标headcenter(x,y)分别代入上述2d图像坐标系(x,y)与3d世界坐标系(x,y,z)的转换公式,通过逆矩阵便可以计算得到3d世界坐标系(x,y,z)下的三维头部中心点坐标3dhead(x,y,z)和三维足部中心点坐标3dfoot(x,y,z)。
[0065]
s206、确定参考面,并从参考面上选取辅助点。
[0066]
s207、连接辅助点的坐标与三维头部中心点坐标构成辅助线,辅助线垂直地面。
[0067]
其中,将人头顶的天花板作为参考面,并在参考面上取辅助点3dheadtmp(x 1,y,z),连接三维头部中心点坐标3dhead(x,y,z)得到辅助线l。其中,辅助点3dheadtmp(x 1,y,z)与三维头部中心点坐标3dhead(x,y,z)构成的辅助线l与地面垂直,所以在3d世界坐标系下,x方向与y方向没有偏差,只在z方向做辅助。
[0068]
s208、计算三维足部中心点坐标到辅助线的距离,距离为三维头部中心点坐标到三维足部中心点坐标的预估距离。
[0069]
通过点到线的距离计算方式,可以计算出三维足部中心点坐标3dfoot(x,y,z)到辅助线l的距离,且将距离作为三维头部中心点3dhead(x,y,z)与三维足部中心点3dfoot(x,y,z)的预估距离。
[0070]
s209、基于预估距离、图像采集设备的基础参数、人员图像所包含人员的人体框坐标、人员图像所包含人员的头部框坐标和二维足部中心点坐标计算人员图像所包含人员的人员身高。
[0071]
在本发明实施例中,通过人体检测模型persondetect实现对人体检测,并用人体框进行标注以及进行头部框标注,从人体框中通过人体关键点模型keypoint可以获取到二维足部中心点坐标footcenter(x,y),以及从头部框中通过人体关键点模型keypoint可以获得二维头部中心点坐标headcenter(x,y),然后基于2d像素坐标系与2d图像坐标系的转换关系,以及2d图像坐标系与3d世界坐标系的转换关系,通过逆矩阵的方式将二维足部中心点坐标footcenter(x,y)与二维头部中心点坐标headcenter(x,y)分别转换为三维足部中心点3dfoot(x,y,z)与三维头部中心点3dhead(x,y,z),从而实现2d像素坐标系与3d世界
坐标系下的坐标转换,得到的三维坐标点更有利于身高估计。此外,还通过借助参考面获取辅助点的方式做辅助线,计算预估距离,并结合预估距离以及上述客流相机的内参矩阵与外参矩阵、人员图像的人体框坐标、头部框坐标和二维足部中心点坐标计算人员身高,这样的估算方法视觉差异小,且计算得到的人员身高准确度更高。
[0072]
请参见图3,图3是本发明实施例提供的图2中步骤s203的流程图,具体包括:
[0073]
s2031、通过人体关键点检测模型对人体框进行足部关键点检测,分别获取第一足部坐标与第二足部坐标。
[0074]
其中,标定人体框后,对人体的足部关键点进行检测,上述第一足部坐标与第二足部坐标分别表示人体框中的左脚坐标与右脚坐标,其中左脚坐标可以用左脚脚踝坐标leftankle(x,y)表示,右脚坐标用右脚脚踝坐标rightankle(x,y)。
[0075]
s2032、基于第一足部坐标与第二足部坐标计算均值坐标,并将均值坐标作为二维足部中心点坐标。
[0076]
其中,基于左脚脚踝坐标leftankle(x,y)与右脚脚踝坐标rightankle(x,y)进行均值计算,便可以得到的二维足部中心点坐标footcenter(x,y)。
[0077]
作为一种可能的实施例方式,可以预设一补偿值,当获取两足坐标却只检测到一足时,可以将检测到的一足的坐标结合补偿值作为二维足部中心点坐标,例如:只检测到左脚/右脚,定位左脚/右脚坐标后,在水平方向x轴上结合补偿值进行左脚/右脚坐标的增加或减少,将计算得到的结果作为上述二维足部中心点坐标。
[0078]
s2033、通过人体关键点检测模型对人体框进行头部关键点检测,标记头部框坐标,根据头部框坐标计算头部框的中心位置,并将中心位置作为二维头部中心点坐标。
[0079]
在获取二维足部中心点坐标footcenter(x,y)的过程中,还可以对人体框中的头部框进行标记,同时获取到头部框坐标headrect(x,y,w,h),头部框可以是矩形框,基于头部框坐标headrect(x,y,w,h)的宽度w与高度h可以计算出矩形框的中心点,该中心点的坐标即为二维头部中心点坐标headcenter(x,y)。
[0080]
在本实施例中,通过人体关键点检测模型人体关键点检测,以左脚脚踝坐标leftankle(x,y)与右脚脚踝坐标rightankle(x,y)的坐标均值作为维足部中心点坐标footcenter(x,y),且还通过进行头部框标定,根据头部框坐标计算二维头部中心点坐标headcenter(x,y),这样得到的数据更为准确。
[0081]
请参见图4,图4是本发明实施例提供的一种人员身高的计算装置的结构示意图,如图4所示,装置400包括:
[0082]
第一获取模块401,用于获取图像采集设备采集的人员图像;
[0083]
第二获取模块402,用于从人员图像中获取人员图像所包含人员的二维关键点坐标,二维关键点坐标包括二维头部中心点坐标和二维足部中心点坐标;
[0084]
转换模块403,用于通过二维像素坐标系转三维世界坐标系对二维头部中心点坐标和二维足部中心点坐标进行转换,得到三维头部中心点坐标和三维足部中心点坐标;
[0085]
第一计算模块404,用于获取参考面的辅助点坐标,基于辅助点坐标与三维头部中心点坐标构成辅助线,并计算三维足部中心点坐标到辅助线的预估距离;
[0086]
第二计算模块405,用于基于预估距离、图像采集设备的基础参数、人员图像所包含人员的人体框坐标、人员图像所包含人员的头部框坐标和二维足部中心点坐标计算人员
图像所包含人员的人员身高。
[0087]
可选的,如图5所示,图5为本发明实施例提供的另一种人员身高的计算装置的结构示意图,其中,第二获取模块402包括:
[0088]
第一检测单元4021,用于基于人体检测模型检测人员图像所包含人员的人体框和头部框,人体框有对应的人体框坐标,头部框有对应的头部框坐标;
[0089]
第二检测单元4022,用于通过人体关键点检测模型对人体框和头部框进行二维人体关键点检测,并计算得到二维头部中心点坐标和二维足部中心点坐标。
[0090]
可选的,如图6所示,图6为本发明实施例提供的另一种人员身高的计算装置的结构示意图,其中,第二检测单元4022包括:
[0091]
第一检测子单元40221,用于通过人体关键点检测模型对人体框进行足部关键点检测,分别获取第一足部坐标与第二足部坐标;
[0092]
第一计算子单元40222,用于基于第一足部坐标与第二足部坐标计算均值坐标,并将均值坐标作为二维足部中心点坐标;
[0093]
第二计算子单元40223,用于用于通过人体关键点检测模型对人体框进行头部关键点检测,标记头部框坐标,根据头部框坐标计算头部框的中心位置,并将中心位置作为二维头部中心点坐标。
[0094]
可选的,如图7所示,图7为本发明实施例提供的另一种人员身高的计算装置的结构示意图,其中,装置400还包括:
[0095]
设定模块406,用于设定图像采集设备的基础参数,图像采集设备的基础参数包括图像采集设备的内参矩阵与外参矩阵;
[0096]
且上述转换模块403包括:
[0097]
第一计算单元4031,用于基于图像采集设备的内参矩阵,将二维像素坐标系下的二维头部中心点坐标与二维足部中心点坐标转换到二维图像坐标系下;
[0098]
第二计算单元4031,用于基于图像采集设备的外参矩阵,将二维图像坐标系下的二维头部中心点坐标和二维足部中心点坐标转换到三维世界坐标系下,得到三维头部中心点坐标和三维足部中心点坐标。
[0099]
如图8所示,图8为本发明实施例提供的另一种人员身高的计算装置的结构示意图,其中,第一计算模块404包括:
[0100]
选取单元4041,用于确定参考面,并从参考面上选取辅助点;
[0101]
连接单元4042,用于连接辅助点的坐标与三维头部中心点坐标构成辅助线,辅助线垂直地面;
[0102]
第三计算单元4043,用于计算三维足部中心点坐标到辅助线的距离,距离为三维头部中心点坐标到三维足部中心点坐标的预估距离。
[0103]
本发明实施例提供的人员身高的计算装置能够实现图1-3中人员身高的计算方法实施例中的各个实施方式,以及相应有益效果,为避免重复,这里不再赘述。
[0104]
如图9所示,图9为本发明实施例提供的一种电子设备的结构图。如图9所示,包括:存储器902、处理器901、网络接口903及存储在存储器902上并可在处理器901上运行的计算机程序,其中:
[0105]
处理器901用于调用存储器902存储的计算机程序,执行如下步骤:
[0106]
获取图像采集设备采集的人员图像;
[0107]
从人员图像中获取人员图像所包含人员的二维关键点坐标,二维关键点坐标包括二维头部中心点坐标和二维足部中心点坐标;
[0108]
通过二维像素坐标系转三维世界坐标系对二维头部中心点坐标和二维足部中心点坐标进行转换,得到三维头部中心点坐标和三维足部中心点坐标;
[0109]
获取参考面的辅助点坐标,基于辅助点坐标与三维头部中心点坐标构成辅助线,并计算三维足部中心点坐标到辅助线的预估距离;
[0110]
基于预估距离、图像采集设备的基础参数、人员图像所包含人员的人体框坐标、人员图像所包含人员的头部框坐标和二维足部中心点坐标计算人员图像所包含人员的人员身高。
[0111]
可选的,处理器901执行的从人员图像中获取人员图像所包含人员的二维关键点坐标,包括:
[0112]
基于人体检测模型检测人员图像所包含人员的人体框和头部框,人体框有对应的人体框坐标,头部框有对应的头部框坐标;
[0113]
通过人体关键点检测模型对人体框和头部框进行二维人体关键点检测,并计算得到二维头部中心点坐标和二维足部中心点坐标。
[0114]
可选的,处理器901执行的通过人体关键点检测模型对人体框和头部框进行二维人体关键点检测,并计算得到二维头部中心点坐标和二维足部中心点坐标,包括:
[0115]
通过人体关键点检测模型对人体框进行足部关键点检测,分别获取第一足部坐标与第二足部坐标;
[0116]
基于第一足部坐标与第二足部坐标计算均值坐标,并将均值坐标作为二维足部中心点坐标;
[0117]
通过人体关键点检测模型对人体框进行头部关键点检测,标记头部框坐标,根据头部框坐标计算头部框的中心位置,并将中心位置作为二维头部中心点坐标。
[0118]
可选的,处理器901还用于执行:
[0119]
设定图像采集设备的基础参数,图像采集设备的基础参数包括图像采集设备的内参矩阵与外参矩阵。
[0120]
可选的,处理器901执行的通过二维像素坐标系转三维世界坐标系对二维头部中心点坐标和二维足部中心点坐标进行转换,包括:
[0121]
基于图像采集设备的内参矩阵,将二维像素坐标系下的二维头部中心点坐标与二维足部中心点坐标转换到二维图像坐标系下;
[0122]
基于图像采集设备的外参矩阵,将二维图像坐标系下的二维头部中心点坐标和二维足部中心点坐标转换到三维世界坐标系下,得到三维头部中心点坐标和三维足部中心点坐标。
[0123]
可选的,在处理器901执行的获取参考面的辅助点坐标,基于辅助点坐标与三维头部中心点坐标构成辅助线,并计算三维足部中心点坐标到辅助线的预估距离,包括:
[0124]
确定参考面,并从参考面上选取辅助点;
[0125]
连接辅助点的坐标与三维头部中心点坐标构成辅助线,辅助线垂直地面;
[0126]
计算三维足部中心点坐标到辅助线的距离,距离为三维头部中心点坐标到三维足
部中心点坐标的预估距离。
[0127]
本发明实施例提供的电子设备能够实现基于人员身高的计算方法实施例中的各个实施方式,以及相应有益效果,为避免重复,这里不再赘述。
[0128]
需要指出的是,图中仅示出了具有组件的901-903,但是应理解的是,并不要求实施所有示出的组件,可以替代的实施更多或者更少的组件。其中,本技术领域技术人员可以理解,这里的电子设备是一种能够按照事先设定或存储的指令,自动进行数值计算和/或信息处理的设备,其硬件包括但不限于微处理器、专用集成电路(application specific integrated circuit,asic)、可编程门阵列(field-programmable gatearray,fpga)、数字处理器(digital signal processor,dsp)、嵌入式设备等。
[0129]
电子设备900可以是桌上型计算机、笔记本、掌上电脑及云端服务器等计算设备。电子设备900可以与客户通过键盘、鼠标、遥控器、触摸板或声控设备等方式进行人机交互。
[0130]
存储器902至少包括一种类型的可读存储介质,可读存储介质包括闪存、硬盘、多媒体卡、卡型存储器(例如,sd或dx存储器等)、随机访问存储器(ram)、静态随机访问存储器(sram)、只读存储器(rom)、电可擦除可编程只读存储器(eeprom)、可编程只读存储器(prom)、磁性存储器、磁盘、光盘等。在一些实施例中,存储器901可以是电子设备的内部存储单元,例如该电子设备的硬盘或内存。在另一些实施例中,存储器901也可以是电子设备的外部存储设备,例如该电子设备上配备的插接式硬盘,智能存储卡(smart media card,smc),安全数字(secure digital,sd)卡,闪存卡(flash card)等。当然,存储器901还可以既包括电子设备的内部存储单元也包括其外部存储设备。本实施例中,存储器901通常用于存储安装于电子设备的操作系统和各类应用软件,例如人员身高的计算方法的程序代码等。此外,存储器901还可以用于暂时地存储已经输出或者将要输出的各类数据。
[0131]
处理器901在一些实施例中可以是中央处理器(central processing unit,cpu)、控制器、微控制器、微处理器、或其他数据处理芯片。该处理器902通常用于控制电子设备的总体操作。本实施例中,处理器901用于运行存储器901中存储的程序代码或者处理数据,例如运行人员身高的计算方法的程序代码。
[0132]
网络接口903可包括无线网络接口或有线网络接口,该网络接口903通常用于在电子设备900与其他电子设备之间建立通信连接。
[0133]
本发明实施例还提供一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,该计算机程序被处理器901执行时实现本发明实施例提供的人员身高的计算方法实施例的各个过程,且能达到相同的技术效果,为避免重复,这里不再赘述。
[0134]
本领域普通技术人员可以理解实现实施例人员身高的计算方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,的程序可存储于一计算机可读取存储介质中,该程序在执行时,可包括如各方法的实施例的流程。其中,存储介质可为磁碟、光盘、只读存储记忆体(read-only memory,rom)或随机存取存储器902(random access memory,简称ram)等。
[0135]
以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
