1.本实用新型涉及自动化设备技术领域,具体涉及多工位换膜旋转机构。
背景技术:
2.自动换晶膜系统是固晶封装设备广泛应用的装置,随着固晶机的速度提高,人力成本的急剧升高,人工换膜操作频繁,效率低下,且人体自带静电,会对芯片造成击穿等不可预估的损伤,人工换膜的固晶机已经不符合时代需求,目前双头固晶机已经成为趋势,以往双头固晶机的换膜机构都是两套独立运行,成本高,操作麻烦,晶膜管理复杂。
3.因此,需要提供一种多工位换膜旋转机构来解决多套设备换膜的问题。
技术实现要素:
4.针对现有技术存在的问题,本实用新型提供多工位换膜旋转机构。
5.为实现上述目的,本实用新型的具体方案如下:
6.本实用新型提供多工位换膜旋转机构,包括:升降机构、旋转机构、取放膜机构和定位机构;
7.所述旋转机构安装在所述升降机构上跟随所述升降机构一同升降,所述取放膜机构用于移动晶膜,取放膜机构安装在所述旋转机构上跟随所述旋转机构一同旋转;所述定位机构安装在所述旋转机构上用于多个工位的定位。
8.优选地,所述升降机构包括:安装座、导轨座、气缸、上下滑动导轨、滑动板;
9.所述导轨座垂直安装在所述安装座前端,所述气缸固定安装在所述导轨座的后侧上端,所述气缸的活塞杆垂直朝下穿过所述安装座,所述上下滑动导轨安装在所述导轨座前侧,所述滑动板通过所述上下滑动导轨与导轨座相连。
10.优选地,所述旋转机构包括:电机座、旋转电机、旋转臂;
11.所述电机座的后端与所述气缸的活塞杆固定连接,所述电机座的中间与所述滑动板的下端固定连接,所述旋转电机固定安装在所述电机座的前端,所述旋转电机的转轴穿过所述电机座与所述旋转臂固定连接,用于带动所述旋转臂旋转。
12.优选地,所述旋转臂为十字型,所述十字型旋转臂的其中一端与所述旋转电机的转轴固定连接,所述旋转臂的另外三端用于移动晶膜。
13.优选地,所述取放膜机构包括:真空管道、真空吸盘;
14.所述真空吸盘有三个分别安装在所述旋转臂的三端其中之一上,所述真空吸盘均连接到真空管道。
15.优选地,所述旋转电机为中空电机,所述真空管道从所述中空电机的中间穿过与所述真空吸盘连接。
16.优选地,所述多工位换膜旋转机构包括四个工位:左换膜位置、放空膜位置、取晶膜位置、右换膜位置;所述左换膜位置、放空膜位置、取晶膜位置、右换膜位置从旋转臂的左侧到右侧依次排布。
17.优选地,所述定位机构包括:传感器安装座、第一传感器、第二传感器;
18.所述传感器安装座固定安装在所述电机座上,所述第一传感器和所述第二传感器安装在所述传感器安装座上;
19.所述旋转臂通过所述第一传感器和第二传感器进行位置校准,然后旋转不同的角度后可对应到左换膜位置、放空膜位置、取晶膜位置、右换膜位置,实现在不同位置取放晶膜的动作。
20.采用本实用新型的技术方案,具有以下有益效果:
21.1.一套机构实现四个工位工作,实现了两个位置换膜,成本低;
22.2.采用中空轴电机,解决了旋转造成气管磨损问题;
23.3.真空吸膜,避免了以往夹子对膜的损伤。
附图说明
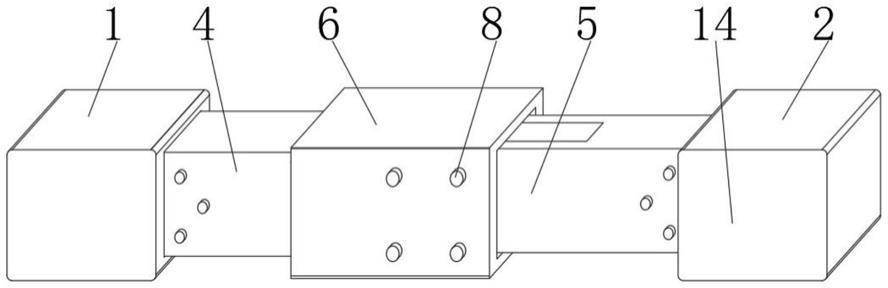
24.图1是本实用新型具体实施方式的立体图;
25.图2是本实用新型具体实施方式的仰视角度的四个工作位置示意图。
具体实施方式
26.下面结合附图和实施例对本实用新型作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本实用新型,而非对本实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本实用新型相关的部分而非全部结构。
27.在本实用新型的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
28.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征高度小于第二特征。
29.在本实施例的描述中,术语“上”、“下”、“前”、“后”、“左”、“右”等方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
30.结合图1-图2所示,本实用新型提供多工位换膜旋转机构,包括:升降机构、旋转机构、取放膜机构和定位机构;
31.所述旋转机构安装在所述升降机构上跟随所述升降机构一同升降,所述取放膜机构安装在所述旋转机构上跟随所述旋转机构一同旋转,所述取放膜机构用于移动晶膜;所述定位机构安装在所述旋转机构上用于多个工位的定位。
32.所述升降机构包括:安装座101、导轨座102、气缸103、上下滑动导轨104、滑动板105;
33.所述导轨座102垂直安装在所述安装座101前端,所述气缸103固定安装在所述导轨座102的后侧上端,所述气缸103的活塞杆垂直朝下穿过所述安装座101,所述上下滑动导轨104安装在所述导轨座102前侧,所述滑动板105通过所述上下滑动导轨104与导轨座102相连。
34.所述旋转机构包括:电机座201、旋转电机202、旋转臂203;
35.所述电机座201的后端与所述气缸103的活塞杆固定连接,所述电机座201的中间与所述滑动板105的下端固定连接,所述旋转电机202安装在所述固定安装在所述电机座201的前端,所述旋转电机202的转轴穿过所述电机座201与所述旋转臂203固定连接,用于带动所述旋转臂203旋转。
36.所述旋转臂203为十字型,所述十字型旋转臂203的其中一端与所述旋转电机202的转轴固定连接,所述旋转臂203的另外三端用于移动晶膜。
37.所述取放膜机构包括:真空管道、真空吸盘303;
38.所述真空吸盘303有三个分别安装在所述旋转臂203的三端其中之一上,所述真空吸盘303均连接到真空管道。
39.所述旋转电机202为中空电机,所述真空管道从所述中空电机的中间穿过与所述真空吸盘303连接。
40.所述多工位换膜旋转机构包括四个工位:左换膜位置a、放空膜位置b、取晶膜位置c、右换膜位置d;所述左换膜位置a、放空膜位置b、取晶膜位置c、右换膜位置d从旋转臂203的左侧到右侧依次排布。
41.所述定位机构包括:传感器安装座403、第一传感器401、第二传感器402;
42.所述传感器安装座403固定安装在所述电机座201上,所述第一传感器401和所述第二传感器402安装在所述传感器安装座403上;
43.所述旋转臂203通过第一传感器401和第二传感器402进行位置校准,然后旋转不同的角度后可对应到左换膜位置a、放空膜位置b、取晶膜位置c、右换膜位置d,实现在不同位置取放晶膜的动作。
44.相较于现有技术,采用本实用新型的技术方案,具有以下有益效果:
45.1.一套机构实现四个工位工作,实现了两个位置换膜,成本低;
46.2.采用中空轴电机,解决了旋转造成气管磨损问题;
47.3.真空吸膜,避免了以往夹子对膜的损伤。
48.以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是在本实用新型的实用新型构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。