1.本发明属于无线通信领域,具体涉及一种基于改进纳什均衡策略的无人机回程传输控制方法。
背景技术:
2.无人机通信作为一种新型的网络服务可替代方案,常在基站无法覆盖的地区用于辅助通信,目前一种可靠的辅助通信方案是无人机作为中继通过与基站建立回程链路然后将数据传输给地面用户以获得高效的传输信道,很大程度上减小了基站直接与用户建立连接所带来的高额链路损失,因此研究无人机如何进行辅助通信对新一代移动通信网络具有十分重要的意义。
3.目前大多数方案致力于解决如何对无人机的位置进行部署以达到覆盖范围的最大化、如何进行资源分配来最大化吞吐量或频谱效率等问题,而常常忽略了无人机的回程链路对前向链路数据传输速率的限制,因此本文提出一种基于改进纳什均衡策略的无人机回程传输方案,在无人机部署工作完成后,可通过当前的无人机位置信息和需求速率信息形成一种类树状的多跳回程网络从而最大程度的满足需求速率以达到最大化有效传输速率的目的。但该方法也存在一定的局限性,该方法在不同的无人机分布下有着不同的性能表现,特别的,当所有的无人机都距离基站过远的情况下且无人机的需求速率较高时,本方案的效果并不明显。
技术实现要素:
4.鉴于以上存在的技术问题,本发明用于提供一种基于改进纳什均衡策略的无人机回程传输控制方法,在得到无人机的需求速率后通过形成一种类树状的多跳回程网络来达到最大化无人机有效回程传输速率。
5.为了解决现有技术存在的技术问题,本发明技术方案如下:
6.一种基于改进纳什均衡策略的无人机回程传输控制方法,包括以下步骤:
7.步骤s10,获取基站的位置信息和与该基站建立回程链路的无人机的位置信息以及每个无人机的需求速率信息;
8.步骤s20,将所有无人机初始化链路设定为直接连接到基站,将能够满足自身需求速率的无人机定义为常驻无人机;
9.步骤s30,将所有非常驻无人机一次参与纳什均衡过程的有序组合作为一次迭代,通过不断的迭代直到形成的回程网络纳什收敛;
10.步骤s40,找到所有参与纳什均衡过程中被空对空链路排斥的无人机;
11.步骤s50,将被空对空链路排斥的无人机连接到有回程链路传输速率余量的无人机,进行优化接入匹配。
12.优选地,获取基站的位置信息和与该基站建立回程链路的无人机的位置信息以及每个无人机的需求速率信息及计算,包括以下步骤:
13.s11,初始化无人机编号u={1,2,3,
…
,n},其中n表示无人机的数目,同时用编号0表示仅存的一个基站,无人机的水平位置信息表示为vi={(xi,yi),i∈u},其中vi表示无人机i的水平位置,基站的位置信息则直接表示为(x0,y0),无人机的需求速率表示为ci,i∈u;
14.s12,计算无人机与基站之间空对地链路和无人机与无人机之间空对空链路的信道最大数据传输速率,分别由下式得到:
15.r
i,0
=bilog2(1 r
i,0
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
16.r
i,j
=bilog2(1 r
i,j
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
17.其中bi表示无人机i的带宽,r
i,0
和r
i,j
分别表示无人机i与基站0和无人机j间信道的信噪比;
18.s13,r
i,0
,r
i,j
分别由下式得到:
[0019][0020][0021]
其中p表示无人机的发射功率,σ2表示平均噪声功率,g
i,0
和g
i,j
分别表示空对地和空对空信道的链路损失;
[0022]
s14,g
i,0
和g
i,j
分别由下式得到:
[0023][0024]
其中和分别为视距链路损失和非视距链路损失,p
los
(θ
i,0
)和p
nlos
(θ
i,0
)分别表示视距传输和非视距传输的概率;
[0025][0026]
其中f是载波频率,l
i,j
表示无人机i与无人机j之间的水平距离,c是光速,μ
los
是视距传输状态下的平均额外损失;
[0027]
s15,p
los
(θ
i,0
)、p
nlos
(θ
i,0
)、分别由下式得到:
[0028][0029]
其中α和β表示由用户的周围环境(例如农村,城市,人口密集程度等)确定的两个常量,θ
i,0
=tan-1
(h/l
i,0
),l
i,0
表示为无人机i与基站0的水平间距,h为无人机i的飞行高度,假设为100米。
[0030]
p
nlos
(θ
i,0
)=1-p
los
(θ
i,0
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0031][0032][0033]
其中f是载波频率,d
i,0
是无人机i与基站0在三维空间上的距离,c是光速,μ
los
和
μ
nlos
分别是视距传输状态下和非视距传输状态下的平均额外损失;
[0034]
优选地,所述将所有无人机初始化链路设定为直接连接到基站,将能够满足自身需求速率的无人机定义为常驻无人机包括以下步骤:
[0035]
s21,初始化链路设定为si表示无人机i的连接对象,于是可以通过目前的链路情况用式(1)计算出所有无人机的空对地信道最大数据传输速率;
[0036]
s22,找出能够满足自身需求速率的无人机作为常驻无人机,该判断过程由下式得到:
[0037][0038]
常驻无人机不会改变自己的连接对象,因此它将不参与后面的纳什均衡过程,进一步的,参加纳什均衡过程的非常驻无人机由下式得到:
[0039]unr
=u-urꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0040]
优选地,所述将所有非常驻无人机一次参与纳什均衡过程的有序组合作为一次迭代,通过不断的迭代直到形成的回程网络纳什收敛包括以下步骤:
[0041]
s31,制定效用函数来确定无人机的纳什均衡点,效用函数由下式得到:
[0042][0043]
其中表示无人机i的回程路径qi中第k个无人机到第k 1个无人机(或基站)的数据传输速率,代表无人机i回程路径的拥堵程度,g表示形成的回程有向网络g(v,s),具体包含了无人机的位置信息和链路信息;
[0044]
s32,回程路径qi和拥堵函数分别由下式得到:
[0045][0046]
其中令qi的长度为k;
[0047][0048]
其中表示无人机i的回程路径qi中的第k个无人机接收到的来自其他回程路径中存在无人机i的无人机的总需求速率(包括自身的需求速率),表示无人机i的回程路径qi中第k个无人机向第k 1个无人机(或基站)的信道最大传输速率,如果在中对于任意(ik,i
k 1
)∈qi存在小于我们将取-1,以表示结果失效;
[0049]
s33,对所有非常驻无人机u
nr
进行优先排序,优先选取距离基站最远的无人机参与纳什均衡过程,选取过程由下式得到:
[0050][0051]
其中δ(t)表示在每一次迭代中的t时刻所有等待参与纳什均衡过程的无人机序列,在每一次对无人机i
*
开展纳什均衡过程结束后有t=t 1,δ(t)=δ(t-1)-i
*
;
[0052]
s34,对i
*
开展纳什均衡过程,使其遍历性地虚拟连接其他所有无人机,每一次虚
拟连接依据(13)对应一个然后将满足最大效用函数的虚拟连接对象作为纳什均衡点并建立链路,由下式得到:
[0053][0054]
s35,重复s33,s34直到结束第一次迭代,保存此时形成的回程链路网络g1(ν,s),表示第一次迭代结束所形成的回程链路网络,然后此时初始化δ(t)=u
nr
,开始第二次迭代,每次迭代的方案与s33,s34所述一致,直到形成的回程网络与之前所形成的回程网络相同,此时纳什收敛,结束迭代;
[0055]
优选地,所述找到所有参与纳什均衡过程中被空对空链路排斥的无人机为在纳什均衡过程结束后从所有非常驻无人机中找到信道依旧为空对地信道的无人机作为被空对空链路排斥的无人机uj。
[0056]
优选地,所述将被空对空链路排斥的无人机连接到有回程链路传输速率余量的无人机,进行优化接入匹配包括以下步骤:
[0057]
s51,对所有被空对空链路排斥的无人机uj进行优先排序,优先选取距离基站最远的无人机参与空对空链路接入匹配过程,选取过程由下式得到:
[0058][0059]
s52,找到回程传输余量最大所对应的常驻无人机j
*
,由下式得到:
[0060][0061]
s53,对比无人机i
*
的回程传输速率与无人机j
*
的回程传输速率余量,若前者大于后者,结束整个s50过程,反之,计算对比与无人机j
*
的空对地回程链路传输速率余量,若前者大于后者,更新进入s56,反之,对比与若前者大于后者,依然更新进入s54;
[0062]
s54,将连接对象为j
*
的无人机作为新的j
*
,对比此时与无人机j
*
的最大回程传输速率余量若前者大于后者,则进入s55,反之,重复s54,直到j
*
无法更新时进入s56。注意,若有多个连接对象为j
*
的无人机,则需要并列地对每一个无人机作用上述过程;
[0063]
s55,对比与无人机i
*
当前回程传输速率,若前者大于后者,更新执行s56,反之,执行s54;
[0064]
s56,从uj中分离出i
*
,执行s51;
[0065]
与现有技术相比,本发明具有如下的有益效果:
[0066]
本发明所提供的基于改进纳什均衡策略的无人机回程传输方案,在得到无人机的需求速率后通过形成一种类树状的多跳回程网络来达到最大化无人机有效回程传输速率的目的;同时,本发明提出了一种基于纳什均衡策略的改进算法,对无人机通过一种以到基
站的距离为依据而有序的参与纳什过程来尽可能的平衡由于无人机位置不同所带来的信道差异,同时解决了该算法中效用函数本身所带来的链路排斥问题,充分的利用了链路资源以最大化提高数据传输效率,最终形成均衡每个无人机回程传输速率的类树状多跳网络。
附图说明
[0067]
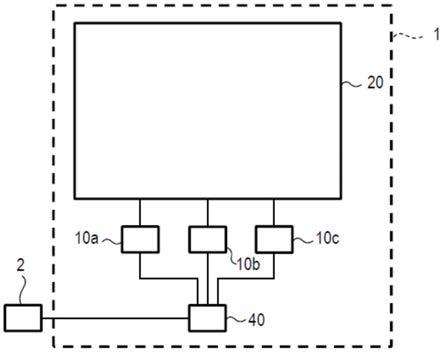
图1为本发明实施例的回程网络实验模型图;
[0068]
图2为本发明实施例的基于改进纳什均衡策略的无人机回程传输控制方法的步骤流程图;
[0069]
图3为本发明实施例的基于改进纳什均衡策略的无人机回程传输控制方法s30步骤流程图;
[0070]
图4为本发明实施例的基于改进纳什均衡策略的无人机回程传输控制方法中s50步骤流程图;
具体实施方式
[0071]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0072]
参见图1,本发明实验环境为一个基站和五个无人机,每个无人机服务地面用户,每个服务地区地面用户的需求速率总和作为无人机的需求速率,假设无人机的飞行高度均为100米,每个无人机的回程信道的带宽为40mhz且彼此正交,每个无人机可以直接连接基站也可以通过连接其他无人机通过多跳最终连接到基站。
[0073]
参见图2,本发明公开了一种基于改进纳什均衡策略的无人机回程传输控制方法,包括以下步骤:
[0074]
步骤s10,获取基站的位置信息和与该基站建立回程链路的无人机的位置信息以及每个无人机的需求速率信息;
[0075]
步骤s20,将所有无人机初始化链路设定为直接连接到基站,将能够满足自身需求速率的无人机定义为常驻无人机;
[0076]
步骤s30,将所有非常驻无人机一次参与纳什均衡过程的有序组合作为一次迭代,通过不断的迭代直到形成的回程网络纳什收敛;
[0077]
步骤s40,找到所有参与纳什均衡过程中被空对空链路排斥的无人机;
[0078]
步骤s50,将被空对空链路排斥的无人机连接到有回程链路传输速率余量的无人机,进行优化接入匹配,包括以下步骤:
[0079]
s11,初始化无人机编号u={1,2,3,
…
,n},其中n表示无人机的数目,同时用编号0表示仅存的一个基站,无人机的水平位置信息表示为vi={(xi,yi),i∈u},其中vi表示无人机i的水平位置,基站的位置信息则直接表示为(x0,y0),无人机的需求速率表示为ci,i∈u;
[0080]
s12,计算无人机与基站之间空对地链路和无人机与无人机之间空对空链路的信道最大数据传输速率,分别由下式得到:
[0081]ri,0
=bilog2(1 r
i,0
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0082]ri,j
=bilog2(1 r
i,j
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0083]
其中bi表示无人机i的带宽,r
i,0
和r
i,j
分别表示无人机i与基站0和无人机j间信道的信噪比;
[0084]
s13,r
i,0
,r
i,j
分别由下式得到:
[0085][0086][0087]
其中p表示无人机的发射功率,σ2表示平均噪声功率,g
i,0
和g
i,j
分别表示空对地和空对空信道的链路损失;
[0088]
s14,g
i,0
和g
i,j
分别由下式得到:
[0089][0090]
其中和分别为视距链路损失和非视距链路损失,p
los
(θ
i,0
)和p
nlos
(θ
i,0
)分别表示视距传输和非视距传输的概率;
[0091][0092]
其中f是载波频率,l
i,j
表示无人机i与无人机j之间的水平距离,c是光速,μ
los
是视距传输状态下的平均额外损失;
[0093]
s15,p
los
(θ
i,0
)、p
nlos
(θ
i,0
)、分别由下式得到:
[0094][0095]
其中α和β表示由用户的周围环境(例如农村,城市,人口密集程度等)确定的两个常量,θ
i,0
=tan-1
(h/l
i,0
),l
i,0
表示为无人机i与基站0的水平间距,h为无人机i的飞行高度,假设为100米。
[0096]
p
nlos
(θ
i,0
)=1-p
los
(θ
i,0
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0097][0098][0099]
其中f是载波频率,d
i,0
是无人机i与基站0在三维空间上的距离,c是光速,μ
los
和μ
nlos
分别是视距传输状态下和非视距传输状态下的平均额外损失;
[0100]
s20,将所有无人机初始化链路设定为直接连接到基站,将能够满足自身需求速率的无人机定义为常驻无人机包括以下步骤:
[0101]
s21,初始化链路设定为si表示无人机i的连接对象,于是可以通过目前的链路情况用式(1)计算出所有无人机的空对地信道最大数据传输速率;
[0102]
s22,找出能够满足自身需求速率的无人机作为常驻无人机,该判断过程由下式得到:
[0103][0104]
常驻无人机不会改变自己的连接对象,因此它将不参与后面的纳什均衡过程,进一步的,参加纳什均衡过程的非常驻无人机由下式得到:
[0105]unr
=u-urꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0106]
s30,将所有非常驻无人机一次参与纳什均衡过程的有序组合作为一次迭代,通过不断的迭代直到形成的回程网络纳什收敛包括以下步骤:
[0107]
s31,制定效用函数来确定无人机的纳什均衡点,效用函数由下式得到:
[0108][0109]
其中表示无人机i的回程路径qi中第k个无人机到第k 1个无人机(或基站)的数据传输速率,代表无人机i回程路径的拥堵程度,g表示形成的回程有向网络g(v,s),具体包含了无人机的位置信息和链路信息;
[0110]
s32,回程路径qi和拥堵函数分别由下式得到:
[0111][0112]
其中令qi的长度为k;
[0113][0114]
其中表示无人机i的回程路径qi中的第k个无人机接收到的来自其他回程路径中存在无人机i的无人机的总需求速率(包括自身的需求速率),表示无人机i的回程路径qi中第k个无人机向第k 1个无人机(或基站)的信道最大传输速率,如果在中对于任意(ik,i
k 1
)∈qi存在小于我们将取-1,以表示结果失效;
[0115]
s33,对所有非常驻无人机u
nr
进行优先排序,优先选取距离基站最远的无人机参与纳什均衡过程,选取过程由下式得到:
[0116][0117]
其中δ(t)表示在每一次迭代中的t时刻所有等待参与纳什均衡过程的无人机序列,在每一次对无人机i
*
开展纳什均衡过程结束后有t=t 1,δ(t)=δ(t-1)-i
*
;
[0118]
s34,对i
*
开展纳什均衡过程,使其遍历性地虚拟连接其他所有无人机,每一次虚拟连接依据(13)对应一个然后将满足最大效用函数的虚拟连接对象作为纳什均衡点并建立链路,由下式得到:
[0119]
[0120]
s35,重复s33,s34直到结束第一次迭代,保存此时形成的回程链路网络g1(ν,s),表示第一次迭代结束所形成的回程链路网络,然后此时初始化δ(t)=u
nr
,开始第二次迭代,每次迭代的方案与s33,s34所述一致,直到形成的回程网络与之前所形成的回程网络相同,此时纳什收敛,结束迭代;
[0121]
s40,找到所有参与纳什均衡过程中被空对空链路排斥的无人机为在纳什均衡过程结束后从所有非常驻无人机中找到信道依旧为空对地信道的无人机作为被空对空链路排斥的无人机uj。
[0122]
s50,将被空对空链路排斥的无人机连接到有回程链路传输速率余量的无人机,进行优化接入匹配包括以下步骤:
[0123]
s51,对所有被空对空链路排斥的无人机uj进行优先排序,优先选取距离基站最远的无人机参与空对空链路接入匹配过程,选取过程由下式得到:
[0124][0125]
s52,找到回程传输余量最大所对应的常驻无人机j
*
,由下式得到:
[0126][0127]
s53,对比无人机i
*
的回程传输速率与无人机j
*
的回程传输速率余量,若前者大于后者,结束整个s50过程,反之,计算对比与无人机j
*
的空对地回程链路传输速率余量,若前者大于后者,更新进入s56,反之,对比与若前者大于后者,依然更新进入s54;
[0128]
s54,将连接对象为j
*
的无人机作为新的j
*
,对比此时与无人机j
*
的最大回程传输速率余量若前者大于后者,则进入s55,反之,重复s54,直到j
*
无法更新时进入s56。注意,若有多个连接对象为j
*
的无人机,则需要并列地对每一个无人机作用上述过程;
[0129]
s55,对比与无人机i
*
当前回程传输速率,若前者大于后者,更新执行s56,反之,执行s54;
[0130]
s56,从uj中分离出i
*
,执行s51;
[0131]
当s50结束后,回程网络形成,而s50结束分为两种情况,一是满足s53中结束条件正常结束,二是s56中uj为空集时强制结束。
[0132]
具体实例中,可根据无人机位置部署的情况来确定是否根据当前情况重新根据该方案形成适用于此时的回程网络。
[0133]
应当理解,本文所述的示例性实施例是说明性的而非限制性的。尽管结合附图描述了本发明的一个或多个实施例,本领域普通技术人员应当理解,在不脱离通过所附权利要求所限定的本发明的精神和范围的情况下,可以做出各种形式和细节的改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。