1.本发明涉及相机标定技术领域,尤其涉及泛电子领域内自动光学检测设备的标定方法,保证设备的检测精度。
背景技术:
2.在泛电子领域,随着电子元器件日益微型化、密集化,自动光学检测设备精密检测面临着越来越严苛的挑战。而相机标定的结果直接影响了设备的检测精度,传统自动光学检测设备都是采用z轴锁定的标定方法,即在整个检测范围内,相机都是固定一个高度拍取标定图像,获得标定图像后,通过算法计算出相机的标定参数(例如:内参和外参)。但是,由于轨道存在装配误差,无法保证整个检测范围内轨道平面与相机的焦平面完全平行,因此该标定方法无法克服检测系统的z方向误差,从而导致整个标定范围内相机的分辨率不一致,降低了系统的检测精度。本发明提出了一种通过z轴自适应调整的标定方法,在标定时根据标定位置实时调制z轴,保证了检测系统在检测范围内分辨率的一致性,有效提高自动光学检测设备的检测精度。
技术实现要素:
3.本发明要解决的技术问题是为了克服标定时z方向的误差导致自动光学检测设备检测精度下降,误报增多的问题,提供一种能够通过z轴自适应调整的标定方法来提高整个检测系统的精度。
4.本发明通过下述技术方案解决上述技术问题:本方法采用检测设备中的视觉、运动及数据处理装置,包括x,y,z轴运动控制平台,轨道,工业面阵相机,环形灯源,标定板及上位机(例如:工控机、fpga嵌入式平台等),本方法具体如下。
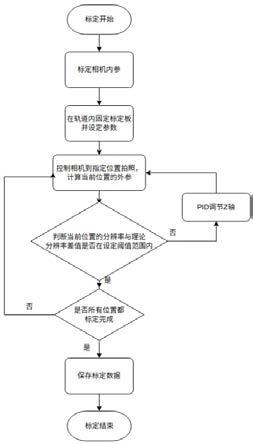
5.s1、标定工业相机的内参,调整好工业相机的工作距离。在相机的焦距范围内调整标定板的角度,相机采集n张标定图像到上位机,上位机通过这些标定图像计算出相机的内参。
6.s2、在轨道内固定好标定板,调整并输入设备期望的分辨率参数r
x,ry
、标定范围、环形灯源参数、图像预处理参数及标定板参数。
7.s3、标定相机的外部参数,运动控制平台控制相机到指定位置拍摄标定板图像。上位机根据收到的图像进行外参计算,同时计算出该位置的工作距离wdi和分辨率r
xi,ryi
,其中字母i代表了标定位置的索引号。
8.s4、比较分辨率r
xi,ryi
和期望分辨率r
x,ry
的大小,如果r
xi,ryi
和r
x,ry
的差异大于设定的阈值,通过pid控制调整相机工作距离wdi,重新计算该位置的分辨率。如果r
xi,ryi
和r
x,ry
的差异在设定阈值范围内,移动到下一个标定位置继续进行标定。
9.s5、不断循环迭代执行s4,直到分辨率r
xi,ryi
和期望分辨率的r
x,ry
的差异小于指定阈值,记录该位置的外参、马达x,y坐标和工作距离wdi,移动到下一个标定位置继续进行标定。
10.s6、完成整个标定范围内的标定工作,保存每一个标定位置的外参,马达x,y坐标和工作距离wd到系统内。
11.s7、在后续的检测定位中,如果检测位置刚好在标定位置,直接使用标定位置的外参进行坐标映射;若不在标定的位置,使用插值的方式计算出该坐标位置的外参,马达x,y坐标和工作距离wd。坐标的外参用于x-y-z的世界坐标系到图像u-v坐标系的映射,马达x,y坐标和wd用于马达的空间定位。
12.其中,步骤s1包括以下。
13.s8、为了保证运动控制平台的标定精度,x,y方向可以使用伺服控制平台,z方向可以使用步进控制平台,利用步进电机的力矩锁定特性避免相机在z方向因为重力作用带来的扰动。
14.s9、为了保证检测设备的定位精度,标定板内标定点的间距不超过5mm,间距越小理论精度越高。
15.s
10
、为了满足内参计算算法的条件,相机采集的标定板图像数量n至少为6,采集的图像越多理论精度越高,相应的计算时间也会更久,需要根据场景确定合适的n值。
16.其中,步骤s2包括以下。
17.s
11
、设备的期望分辨率由设备检测能力的要求确定,分辨率越小,整个系统的定位精度以及标定板的工艺规格越高。
18.s
12
、环形灯源参数包括r,g,b三色环形侧灯源以及顶部灯源(例如:白光),不同的灯源参数直接影响标定点的定位。本标定方法支持合成灯源,即r,g,b和顶部灯源可以按照一定的比例进行合成。
19.s
13
、本方法支持的图像处理参数包含双边滤波、二值化以及图像开闭运算形态学等操作。
20.其中,步骤s3包括以下。
21.s
14
、在外参标定开始时,系统自动检验设定的参数是否合适,并自动将测量范围分配为若干宫格(4,9
…
),宫格的数量可以设置,运动控制平台控制相机到指定的宫格位置进行取像然后计算外参,当检测出的标定点数量和设定的标定点数量不匹配时,系统会给予提示并中断标定,操作员需要再次进行参数确认。
22.s
15
、正式开始标定的过程中,当检测出的标定点数量和设定的标定点数量不匹配时,系统会记录该位置,然后继续后续的标定工作。待标定完成后,系统会提醒操作员标定失败的位置,操作员针对标定失败位置重新标定,而不需要全范围重新标定。
附图说明
23.图1为本发明采用的标定装置的示意图。
24.图2为本发明高精度z轴自适应标定流程。
具体实施方式
25.下面结合附图对本发明的具体实施方式做进一步说明,以详细说明本发明的技术方案。
26.如附图1所示,本发明的标定装置包括x,y,z轴运动控制平台,轨道,工业面阵相
机,环形灯源,标定板及上位机,为了保证运动控制平台的标定精度,x,y方向可以使用伺服控制平台,z方向可以使用步进控制平台,利用步进电机的力矩锁定特性来避免相机在z方向因为重力作用带来的扰动。环形灯源包括r,g,b三色环形灯源以及顶部灯源(例如:白光)。为了保证检测设备的定位精度,标定板内标定点的间距不超过5mm,间距越小理论精度越高。下面对本发明中一种泛电子领域自动光学检测设备的标定方法进行详细说明。
27.s1、标定工业相机的内参,调整好工业相机的工作距离。在相机的焦距范围内调整标定板的角度,相机采集n张标定图像到上位机,上位机通过这些标定图像计算出相机的内参。为了满足内参计算算法的条件,相机采集的标定板图像数量n至少为6,采集的图像越多理论精度越高,相应的计算时间也会更久。
28.s2、在轨道内固定好标定板,调整并输入设备期望的分辨率参数r
x,ry
、标定范围、环形灯源参数、图像预处理参数及标定板参数。设备的期望分辨率由具体的设备要求确定,分辨率越小,整个系统的定位精度以及相机标定板的工艺规格越高。本方法支持的图像处理参数包含双边滤波、二值化以及图像开闭运算形态学操作。
29.s3、标定相机的外部参数,运动控制平台控制相机运动到指定位置拍摄标定板图像。上位机根据收到的图像进行外参计算,同时会计算出该位置的工作距离wdi和分辨率r
xi,ryi
,其中i代表了标定位置的索引号。在外参标定开始时,系统自动检验设定的参数是否合适。系统自动将测量范围分配为若干宫格(4,9
…
),宫格的数量可以设置。当检测出的标定点数量和设定的标定点数量不匹配时,系统会给予提示并中断标定,操作员需要再次确认参数。正式标定的过程中,当检测出的标定点数量和设定的标定点数量不匹配时,系统会记录该位置,然后继续后续的标定工作。待标定完成后,系统会提醒操作员标定失败的位置,操作员针对标定失败位置重新标定,而不需要全范围重新标定。
30.s4、比较分辨率r
xi,ryi
和期望分辨率的r
x,ry
大小,如果r
xi,ryi
和r
x,ry
的差异大于设定的阈值时,通过pid控制调整相机工作距离wdi,重新计算该位置的分辨率。如果r
xi,ryi
和r
x,ry
的差异在设定阈值范围内,移动到下一个标定位置继续进行标定。
31.s5、不断循环迭代执行s4,直到分辨率r
xi,ryi
和期望分辨率的r
x,ry
的差异小于指定阈值,记录该位置的外参、马达x,y坐标和工作距离wdi,移动到下一个标定位置进行标定。
32.s6、完成整个标定范围内的标定工作,保存每一个标定位置的外参、马达x,y坐标和wd到系统内。
33.s7、在后续的检测定位中,如果检测位置刚好在标定的位置,直接使用标定位置的外参进行坐标映射;若不在标定的位置,使用插值的方式计算出该坐标位置的外参、马达x,y坐标和wd。坐标的外参用于x-y-z的世界坐标系到图像u-v坐标系的映射,马达x,y坐标和wd用于马达的空间定位。
34.综上所述,本发明提供了丰富的标定参数设置和全自动的防错机制,有效提高相机标定的精度。在标定过程中,z轴会根据设备分辨率自适应调整,从而保证了整个检测范围内分辨率的一致性,有效补偿设备因装配引起的误差,提高了设备的检测精度,降低了误报率。
35.虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这些仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更
和修改均落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。