1.本技术涉及电网机组组合技术领域,特别涉及一种考虑转动惯量约束的受端电网机组组合方法及系统。
背景技术:
2.本部分的陈述仅仅是提供了与本技术相关的背景技术,并不必然构成现有技术。
3.特高压直流输电在大规模、远距离、高效率的电力传输技术方面具有天然的优势,因此成为解决能源和负荷逆向分布问题的主要方式。我国已相继建成并投运鲁固、昭沂、雁淮、天中等跨区域特高压直流输电工程,形成交直流混联大电网的格局。负荷中心的电网逐步成为交直流混联受端电网,直流逐步代替了发电机机组,大大降低了交直流受端电网的转动惯量。而且受端电网中风电为代表的清洁可再生能源得到了迅猛发展,风电出力呈现出的不确定性以及风电机组对电网表现出的低惯量特征给电网稳定运行带来了挑战。
4.交直流受端电网的机组组合优化是指在满足常规火电机组和系统相关约束的情况下,通过制定火电机组的启停计划和出力计划以及直流受电计划,最小化系统的运行成本。目前研究中缺乏对动态频率稳定深入的研究。
技术实现要素:
5.为了解决现有技术的不足,本技术提供了一种考虑转动惯量约束的受端电网机组组合方法及系统,同时考虑发电机和风电场的转动惯量,并以此为基础进行分析计算整个受端电网的转动惯量,能够考虑受端电网的最小转动惯量约束,建立受端电网机组组合模型,具非线性、多约束,且包含离散、连续两种决策变量的非凸优化效果,采用改进的粒子群算法这种群体智能优化算法,计算过程更加快速有效。
6.为了实现上述目的,本技术采用如下技术方案:
7.本技术第一方面提供了一种考虑转动惯量约束的受端电网机组组合方法,包括以下步骤:
8.s01,获取受端电网原始数据以及二进制粒子群算法(binary particle swarm optimizer,bpso)的控制参数,并设定t=0、最大迭代次数t和种群规模n,t为迭代粒子的次数;
9.s02,预处理,形成满足旋转备用约束和开停机时间约束的可行解;
10.s03,在预处理的可行解下,根据二次规划的有效集法进行动态经济调度,并利用清晰等价类进行处理机会约束,同时计算目标函数;
11.s04,计算目标公式,更新粒子群速度和位置,产生新粒子;
12.s05,对产生的新粒子,根据二次规划的有效集法进行动态经济调度,并利用清晰等价类进行处理机会约束,同时计算目标函数;
13.s06,将新旧粒子群合并排序,并确定最优个体;
14.s07,确定达到迭代次数或预定收敛精度的情况下,输出最优个体,否则循环至
s04。
15.可选地,电网原始数据,包括:
16.受端电网中发电机参数、风电出力和负荷的预测参数以及预测误差。
17.可选地,bpso算法的控制参数,包括:
18.随机生成直流输电功率以及机组各时段开停机状态,直流输电功率为连续变量,机组开停机状态形成二元决策变量并作为粒子群坐标,其中0代表机组的停机状态,1代表机组的开机状态。
19.可选地,目标函数为:
[0020][0021]
其中,p
git
为机组i在第t调度周期内计划出力,ng为系统内火电机组数目,n
t
为调度周期,i
it
为机组i在第t调度周期内的启停状态,i
i(t-1)
为机组i在第t-1调度周期内的启停状态,开机为1,停机为0,ci为机组i的燃料费用函数,s
it
为机组i在第t调度周期内的开机成本,d为直流输电的功率函数,p
dt
为第t调度周期内的直流输送功率。
[0022]
可选地,机组燃料费用函数ci表示为出力p
git
的二次函数:
[0023][0024]
其中,ci、bi和ai为机组i的燃料费用系数。
[0025]
可选地,目标公式为:
[0026]
ν
i,j
(t 1)=ων
i,j
(t) c1r1[p
i,j
—(1 ξ1)x
i,j
(t) ξ1x
i,j
(t-1)] c2r2[p
g,j
—(1 ξ2)x
i,j
(t) ξ2x
i,j
(t-1)]
[0027]
其中,ν
i,j
(t 1)为第t 1次迭代粒子i的速度,ν
i,j
(t)为第t次迭代粒子i的速度,x
i,j
(t)为第t次迭代粒子i的位置,x
i,j
(t-1)为第t-1次迭代粒子i的位置,p
i,j
为迭代过程中粒子i的最优解,p
g,j
为迭代过程中全局的最优解,ω为惯性权因子,c1,c2为学习因子,r1,r2为0到1之间均匀分布的随机数,ξ1,ξ2为随机数。
[0028]
可选地,所述目标公式的计算过程中,
[0029]
算法前期取
[0030]
算法后期取
[0031]
本技术第二方面提供了一种考虑转动惯量约束的受端电网机组组合系统。
[0032]
考虑转动惯量约束的受端电网机组组合系统,包括:
[0033]
数据获取模块,被配置为:获取受端电网原始数据以及bpso算法的控制参数,并设定t=0、最大迭代次数t和种群规模n,t为迭代粒子的次数;
[0034]
预处理模块,被配置为:预处理,形成满足旋转备用约束和开停机时间约束的可行解;
[0035]
第一计算模块,被配置为:在预处理的可行解下,根据二次规划的有效集法进行动态经济调度,并利用清晰等价类进行处理机会约束,同时计算目标函数;
[0036]
第二计算模块,被配置为:计算目标公式,更新粒子群速度和位置,产生新粒子;
[0037]
第三计算模块,被配置为:对产生的新粒子,根据二次规划的有效集法进行动态经济调度,并利用清晰等价类进行处理机会约束,同时计算目标函数;
[0038]
数据处理模块,被配置为:将新旧粒子群合并排序,并确定最优个体;
[0039]
判断处理模块,被配置为:确定达到迭代次数或预定收敛精度的情况下,输出最优个体,否则循环至第二计算模块执行的步骤。
[0040]
可选地,电网原始数据,包括:
[0041]
受端电网中发电机参数、风电出力和负荷的预测参数以及预测误差。
[0042]
可选地,bpso算法的控制参数,包括:
[0043]
随机生成直流输电功率以及机组各时段开停机状态,直流输电功率为连续变量,机组开停机状态形成二元决策变量并作为粒子群坐标,其中0代表机组的停机状态,1代表机组的开机状态。
[0044]
可选地,目标函数为:
[0045][0046]
其中,p
git
为机组i在第t调度周期内计划出力,ng为系统内火电机组数目,n
t
为调度周期,i
it
为机组i在第t调度周期内的启停状态,i
i(t-1)
为机组i在第t-1调度周期内的启停状态,开机为1,停机为0,ci为机组i的燃料费用函数,s
it
为机组i在第t调度周期内的开机成本,d为直流输电的功率函数,p
dt
为第t调度周期内的直流输送功率。
[0047]
可选地,机组燃料费用函数ci表示为出力p
git
的二次函数:
[0048][0049]
其中,ci、bi和ai为机组i的燃料费用系数。
[0050]
可选地,目标公式为:
[0051]
ν
i,j
(t 1)=ων
i,j
(t) c1r1[p
i,j
—(1 ξ1)x
i,j
(t) ξ1x
i,j
(t-1)] c2r2[p
g,j
—(1 ξ2)x
i,j
(t) ξ2x
i,j
(t-1)]
[0052]
其中,ν
i,j
(t 1)为第t 1次迭代粒子i的速度,ν
i,j
(t)为第t次迭代粒子i的速度,x
i,j
(t)为第t次迭代粒子i的位置,x
i,j
(t-1)为第t-1次迭代粒子i的位置,p
i,j
为迭代过程中粒子i的最优解,p
g,j
为迭代过程中全局的最优解,ω为惯性权因子,c1,c2为学习因子,r1,r2为0到1之间均匀分布的随机数,ξ1,ξ2为随机数。
[0053]
可选地,所述目标公式的计算过程中,
[0054]
算法前期取
[0055]
算法后期取
[0056]
本技术第三方面提供了一种介质,其上存储有程序,该程序被处理器执行时实现如本技术第一方面的考虑转动惯量约束的受端电网机组组合方法中的步骤。
[0057]
本技术第四方面提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,处理器执行程序时实现如本技术第一方面的考虑转动惯量约束的受端电网机组组合方法中的步骤。
[0058]
与现有技术相比,本技术的有益效果是:
[0059]
(1)本技术的方法能够同时考虑发电机和风电场的转动惯量,并以此为基础进行分析计算整个受端电网的转动惯量,解决电网转动惯量的评估问题;
[0060]
(2)本技术的方法能够考虑受端电网的最小转动惯量约束,建立受端电网机组组合模型,提高受端电网应对直流闭锁时的频率稳定性;
[0061]
(3)本技术的受端电网机组组合方法具有非线性、多约束,且包含离散、连续两种决策变量的非凸优化效果,采用改进的粒子群算法这种群体智能优化算法,计算过程更加快速有效。
附图说明
[0062]
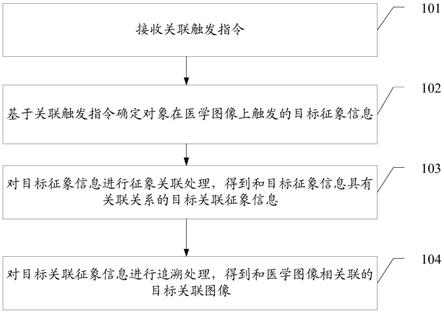
图1为本公开实施例1提供的考虑转动惯量约束的受端电网机组组合方法的流程图;
[0063]
图2为本公开实施例1提供的改进的10机39节点测试系统示意图;
[0064]
图3为本公开实施例2提供的考虑转动惯量约束的受端电网机组组合系统的结构示意图。
具体实施方式
[0065]
应该指出,以下详细说明都是示例性的,旨在对本技术提供进一步的说明。除非另有指明,本技术使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。
[0066]
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
[0067]
在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
[0068]
实施例1:
[0069]
如图1所示,本公开实施例提供了考虑转动惯量约束的受端电网机组组合方法,包括以下步骤:
[0070]
s01,获取受端电网原始数据以及bpso算法的控制参数,并设定t=0、最大迭代次数t和种群规模n,t为迭代粒子的次数;
[0071]
s02,形成满足旋转备用约束和开停机时间约束的可行解;
[0072]
s03,在预处理的可行解下,根据二次规划的有效集法进行动态经济调度,并利用清晰等价类进行处理机会约束,同时计算目标函数;
[0073]
s04,计算目标公式,更新粒子群速度和位置,产生新粒子;
[0074]
s05,对产生的新粒子,根据二次规划的有效集法进行动态经济调度,并利用清晰等价类进行处理机会约束,同时计算目标函数;
[0075]
s06,将新旧粒子群合并排序,并确定最优个体;
[0076]
s07,确定达到迭代次数或预定收敛精度的情况下,输出最优个体,否则循环至s04。
[0077]
在一个实施例中,形成满足旋转备用约束和开停机时间约束的可行解包括:不满足旋转备用机会约束,按照机组容量指标,由小到大逐步开机,直至满足备用。不满足开停机时间约束,在最小开机时段或停机时段内,以机组状态转换的次数最少为原则来修改。
[0078]
在一个实施例中,上述电网原始数据,包括:
[0079]
受端电网中发电机参数、风电出力和负荷的预测参数以及预测误差。
[0080]
在一个实施例中,上述bpso算法的控制参数,包括:
[0081]
随机生成直流输电功率以及机组各时段开停机状态,直流输电功率为连续变量,机组开停机状态形成二元决策变量并作为粒子群坐标,其中0代表机组的停机状态,1代表机组的开机状态。
[0082]
在一个实施例中,目标公式为:
[0083]
ν
i,j
(t 1)=ων
i,j
(t) c1r1[p
i,j
—(1 ξ1)x
i,j
(t) ξ1x
i,j
(t-1)] c2r2[p
g,j
—(1 ξ2)x
i,j
(t) ξ2x
i,j
(t-1)]
[0084]
其中,ν
i,j
(t 1)为第t 1次迭代粒子i的速度,ν
i,j
(t)为第t次迭代粒子i的速度,x
i,j
(t)为第t次迭代粒子i的位置,x
i,j
(t-1)为第t-1次迭代粒子i的位置,p
i,j
为迭代过程中粒子i的最优解,p
g,j
为迭代过程中全局的最优解,ω为惯性权因子,c1,c2为学习因子,r1,r2为0到1之间均匀分布的随机数,ξ1,ξ2为随机数。
[0085]
可选地,上述目标公式的计算过程中,
[0086]
算法前期取
[0087]
算法后期取
[0088]
在一个实施例中,目标函数为:
[0089][0090]
其中,p
git
为机组i在第t调度周期内计划出力,ng为系统内火电机组数目,n
t
为调度周期,i
it
为机组i在第t调度周期内的启停状态,i
i(t-1)
为机组i在第t-1调度周期内的启停状态,开机为1,停机为0,ci为机组i的燃料费用函数,s
it
为机组i在第t调度周期内的开机成本,d为直流输电的功率函数,p
dt
为第t调度周期内的直流输送功率。
[0091]
可选地,机组燃料费用函数ci表示为出力p
git
的二次函数:
[0092][0093]
其中,ci、bi和ai为机组i的燃料费用系数。
[0094]
可选地,机组开机成本s
it
与锅炉温度有关,长时间停机锅炉冷却,增加机组开机成本,s
it
的函数表达式为:
[0095][0096]
其中,h
ci
为热开机费用,c
ci
为冷开机费用;m
di
为最小停机时间;c
sti
为冷开机时间;o
tit
为停机时间。
[0097]
可选地,d(p
dt
)=bdp
dt
;其中,bd为直流输电输送单位功率时的运行费用,d为直流输电的功率函数,p
dt
为第t调度周期内的直流输送功率。由于直流送端通常为水电、光伏和风电等新能源,通常发电成本比火电机组低,本模型只考虑运维成本,为简化模型本文统一采用线性模型。
[0098]
在一个实施例中,单台发电机中,同步机的惯量理论值可以用机组旋转储存的动能,表示为:
[0099][0100]
式中:e为惯量理论量值;j为转动惯量;ω为机械角速度。从式中可见,发电机惯量理论量值取决于转动惯量和转速,而额定运行条件下,惯量理论值仅取决于其转动惯量。
[0101]
电力系统多机系统中,根据能量守恒定理,系统等效惯量理论值的表达式:
[0102][0103]
式中:eg为发电机组等效惯量理论量值;ei为第i台发电机组的惯量理论量值;g为系统中发电机的集合。
[0104]
在一个实施例中,风电机组提供虚拟惯量的机理如下:正常运行时,风电机组输出的电功率等于其叶片捕获的风功率,而风机本身的转速(对应动能)保持不变。当电网故障状态下频率发生偏差时,风电机组可通过释放或储存转子动能,起到频率支撑的作用。这种控制主要分为虚拟惯量控制(抑制频率变化率)和一次调频控制(抑制频率变化量)。
[0105]
双馈风电机组旋转动能主要存储在风电机组传动链中,传动链主要由叶轮、传动轴、齿轮箱、双馈发电机组成,而叶轮和发电机的转动惯量远大于传动轴、齿轮箱,因此计算中仅考虑叶轮和发电机部分,则双馈风电机组传动链等效转动惯量为:
[0106]jt
=jr jgn2[0107]
式中:j
t
为双馈风机的转动惯量;jr为风轮的转动惯量;jg为发电机的转动惯量;n为齿轮箱变比。
[0108]
与同步机一样,双馈风电机组惯量理论量值可以用风电机组旋转储存的动能表示为:
[0109][0110]
式中:ew为风电机组惯量理论量值,ωa为风电机组故障前转动角速度,j
t
为双馈风机的转动惯量。
[0111]
可选地,整个风电场的惯量理论量值等于所有双馈风电机组惯量理论值的加和。
[0112]
在一个实施例中,系统惯量理论量值是电力系统中惯性的不同能量形式的集合,系统惯量理论量值表达为:
[0113]esys
=eg ew[0114]
式中:e
sys
为系统惯量理论量值,eg为发电机组等效惯量理论量值,ew为风电机组惯量理论量值。
[0115]
则系统转动惯量为j
sys
:
[0116]jsys
=2
·esys
/ω
2sys
[0117]
式中:ω
sys
为系统稳定频率f
sys
对应的机械角速度。
[0118]
在一个实施例中,转动惯量约束条件是指,对于受端电网而言,频率稳定主要制约故障为特高压直流闭锁后的系统低频问题,其系统最小转动惯量可通过不触发低频减载装置动作作为校核边界获取。
[0119]
综合考虑负荷动态特性、一次调频特性,为确保直流闭锁情况下不触发系统低频减载动作,系统最低频率可通过下式给出:
[0120][0121]
式中,p
e0
为系统功率扰动时的系统负荷;p
g0
为运行机组的额定容量之和;pd为直流运行的功率;k
l
为负荷的频率系数,取近期故障数据的辨识值;kg为机组频率调节系数,取近期故障数据的辨识值;t1为一次调频响应时间,取以往故障数据的辨识值;a为系统发电机调速响应时间,取以往故障数据的辨识值;tm为频率最低点的时刻,f0为系统的基准频率,为故障后系统频率的衰减系数,ω为频率对应的角速度。
[0122]
通过该公式和系统最低频率δf
min
,计算系统的最小转动惯量j
min
,受端电网的最小转动惯量约束如下:
[0123]jsys
≥j
min
[0124]
在一个实施例中,机组最小开停机时间约束为:
[0125][0126]
式中:t
on,i(t-1)
为机组i到t-1调度周期内的持续开机时间,t
off,i(t-1)
为机组i到t-1调度周期内的持续停机时间;t
on,i
和t
off,i
分别为机组的最小开机时间、最小停机时间,i
it
为机组i在第t调度周期内的启停状态,i
i(t-1)
为机组i在第t-1调度周期内的启停状态。
[0127]
在一个实施例中,预处理的可行解还应满足一下约束中的部分或全部:本机组出力上下限约束、直流输送功率上下限约束、备用容量约束、机组爬坡速率约束、系统功率平衡约束、正备用机会约束和负备用机会约束。
[0128]
可选地,本机组出力上下限约束为:
[0129]
p
gimin
≤p
git
≤p
gimax
,if i
it
=1
[0130]
式中:p
gimin
,p
gimax
分别为机组i的最小出力、最大出力。
[0131]
可选地,直流输送功率上下限约束为:
[0132]
p
dmin
≤p
dt
≤p
dmax
[0133]
式中:p
dmin
,p
dmax
分别为直流输送功率的最小值、最大值。
[0134]
可选地,备用容量约束为:
[0135]uit
=min(p
gimax-p
git
,t
10rui
)
[0136]dit
=min(p
git-p
gimin
,t
10rdi
)
[0137]
式中:u
it
、d
it
为系统的正/负旋转备用,r
ui
和r
di
分别为机组i调度周期的上爬坡率、下爬坡率,t
10
为旋转备用响应时间(10min)。
[0138]
可选地,机组爬坡速率约束为:
[0139]
p
git
≤min(p
gimax
,p
gi(t-1)
t
10rui
),if i
itii(t-1)
=1
[0140]
p
git
≥max(p
gimin
,p
gi(t-1)-t
10rdi
),if i
itii(t-1)
=1
[0141]
p
git
≤p
gimin
t
10rui
,if i
i(t-1)
=0且i
it
=1
[0142]
p
gi(t-1)
≤p
gimin
t
10rdi
,if i
i(t-1)
=1且i
it
=0
[0143]
式中:max和min分别是取最大值函数和取最小值函数,r
ui
和r
di
分别为机组i调度周期的上爬坡率、下爬坡率,t
10
为旋转备用响应时间(10min)。
[0144]
可选地,系统功率平衡约束为:
[0145]
每一机组组合周期内,常规机组出力与风电出力预测值和负荷出力预测值保持功率平衡。
[0146][0147]
式中:p
lt
为t周期内负荷预测期望值,n
gt
为系统内发电机数目,p
wt
为第t调度周期内的风电出力预测期望值,p
dt
第t调度周期内的直流输送功率。
[0148]
可选地,正备用机会约束为:
[0149]
为了简化模型,本文对风电出力和负荷采用正态分布。机组正备用能够在一定置信水平下应对风电预测存在负误差以及负荷预测出现正误差等不确定性。
[0150][0151]
式中:β1分别为概率置信水平,为满足正态分布的风电出力和负荷预测值。
[0152]
可选地,负备用机会约束为:
[0153]
发电机组发生强迫停运时,系统中功率缺乏,负备用的意义的不明显,其机会约束不必考虑。机组负备用能够在一定置信水平下应对风电预测存在正误差和负荷预测出现负误差等不确定性。
[0154][0155]
式中:β2为概率置信水平。
[0156]
在一个实施例中,本技术提出的机组组合模型属于非线性、多约束,且包含离散、连续两种决策变量的非凸优化效果。机组组合决策分为开停机和发电机出力优化两个方面,求解方法包括优先排序、整数规划、动态规划、混合整数规划、分支定界、拉格朗日松弛,以及智能算法、模拟退火、遗传算法和粒子群算法。相对于其他算法,粒子群算法能够全局寻优,设置参数少,收敛速度快。本技术采用改进bpso算法进行机组开停机决策,后用二次规划的有效集法进行发电机出力优化。
[0157]
可选地,二进制粒子群算法在机组组合中有着广泛的应用,而容易陷入局部最优,造成算法过早收敛,使得寻找最优解性能较差,因此本技术采用二阶振荡环节对其改进。基本粒子群算法如下:
[0158]
ν
i,j
(t 1)=ων
i,j
(t) c1r1[p
i,j
—x
i,j
(t)] c2r2[p
g,j
—x
i,j
(t)]
[0159]
x
i,j
(t 1)=x
i,j
(t) ν
i,j
(t 1)
[0160]
式中,ν
i,j
(t 1)为第t 1次迭代粒子i的速度,ν
i,j
(t)为第t次迭代粒子i的速度,x
i,j
(t)为第t次迭代粒子i的位置,x
i,j
(t 1)为第t 1次迭代粒子i的位置,p
i,j
为迭代过程中粒子i的最优解,p
g,j
为迭代过程中全局的最优解,ω为惯性权因子,c1,c2为学习因子,r1,r2为0到1之间均匀分布的随机数,ξ1,ξ2为随机数。
[0161]
粒子速度更新时引入一个振荡环节,可以进一步提高粒子群体的多样性,从而改善算法的全局收敛特性,速度更新方程是:
[0162]
ν
i,j
(t 1)=ων
i,j
(t) c1r1[p
i,j
—(1 ξ1)x
i,j
(t) ξ1x
i,j
(t-1)] c2r2[p
g,j
—(1 ξ2)x
i,j
(t) ξ2x
i,j
(t-1)]
[0163]
其中,ν
i,j
(t 1)为第t 1次迭代粒子i的速度,ν
i,j
(t)为第t次迭代粒子i的速度,x
i,j
(t)为第t次迭代粒子i的位置,x
i,j
(t-1)为第t-1次迭代粒子i的位置,p
i,j
为迭代过程中粒子i的最优解,p
g,j
为迭代过程中全局的最优解,ω为惯性权因子,c1,c2为学习因子,r1,r2为0到1之间均匀分布的随机数,ξ1,ξ2为随机数。
[0164]
算法前期取使得算法具有较强的全局搜索能力,算法后期取使得算法能够渐进收敛。
[0165]
本实施例中,为验证文专利所提机组组合方法的有效性,本文以改进的10机39节点测试系统对组合方法进行算例测试。用同等容量的特高压直流输电和风电站替代典型系统的发电机组,如图2。风电预测误差和负荷预测选取的置信水平为95%,最低频率限值为49.5hz。本专利采用matlab编程求解,最大迭代次数为200,种群数为50。
[0166]
为了分析转动惯量需求约束对机组组合影响,进行了以下两种方案的比较。
[0167]
方法一:不考虑转动惯量约束与动态频率的传统机组组合模型。
[0168]
方法二:在方法一的基础上增加转动惯量约束。
[0169]
两种方法下所求的机组开停如下表1所示:
[0170]
[0171][0172]
表1
[0173]
各方法优化得到的各个时段的机组组合启停状态如表1,发电成本分别约为672142$和708472$。从表中可以看出,加入系统最小转动惯量约束,方法二成本比方法一稍高,同时电网受入的直流输电降低,更多的机组处于开机状态,提高了系统的转动惯量,也提高系统抵御直流闭锁风险的能力。
[0174]
两种方法各时段系统转动惯量和动态最低频率如下表2所示:
[0175][0176]
表2
[0177]
由表2可以看出,本专利提出的方法二各时段均满足最小转动惯量约束,受端电网有足够的转动惯量支撑抵御直流闭锁。而在方法一不考虑转动惯量约束与动态频率的机组组合方法中,存在部分时段(时段9、10、11、12、13)由于缺乏足够的开机而不能满足受端电网的最小转动惯量约束。方法一中,各时段机组调频能力不足,直流闭锁后存在系统的频率跌落至49.5hz以下,受端电网存在触发低频减载的可能。而在方法二中,有足够的机组,系统的转动惯量以及调频能力提高,能够应对直流闭锁能电网极端事件。
[0178]
实施例2:
[0179]
如图3所示,本公开实施例提供了考虑转动惯量约束的受端电网机组组合系统,包括:
[0180]
数据获取模块,被配置为:获取受端电网原始数据以及bpso算法的控制参数,并设定t=0、最大迭代次数t和种群规模n,t为迭代粒子的次数;
[0181]
预处理模块,被配置为:预处理,形成满足旋转备用约束和开停机时间约束的可行
解;
[0182]
第一计算模块,被配置为:在预处理的可行解下,根据二次规划的有效集法进行动态经济调度,并利用清晰等价类进行处理机会约束,同时计算目标函数;
[0183]
第二计算模块,被配置为:计算目标公式,更新粒子群速度和位置,产生新粒子;
[0184]
第三计算模块,被配置为:对产生的新粒子,根据二次规划的有效集法进行动态经济调度,并利用清晰等价类进行处理机会约束,同时计算目标函数;
[0185]
数据处理模块,被配置为:将新旧粒子群合并排序,并确定最优个体;
[0186]
判断处理模块,被配置为:确定达到迭代次数或预定收敛精度的情况下,输出最优个体,否则循环至第二计算模块执行的步骤。
[0187]
上述系统的工作方法与上述各实施例提供的考虑转动惯量约束的受端电网机组组合方法相同,这里不再赘述。
[0188]
实施例4:
[0189]
本公开实施例提供了一种存储介质,其上存储有程序,该程序被处理器执行时实现如上述各实施例提供的考虑转动惯量约束的受端电网机组组合方法中的步骤,包括:
[0190]
s01,获取受端电网原始数据以及bpso算法的控制参数,并设定t=0、最大迭代次数t和种群规模n,t为迭代粒子的次数;
[0191]
s02,预处理,形成满足旋转备用约束和开停机时间约束的可行解;
[0192]
s03,在预处理的可行解下,根据二次规划的有效集法进行动态经济调度,并利用清晰等价类进行处理机会约束,同时计算目标函数;
[0193]
s04,计算目标公式,更新粒子群速度和位置,产生新粒子;
[0194]
s05,对产生的新粒子,根据二次规划的有效集法进行动态经济调度,并利用清晰等价类进行处理机会约束,同时计算目标函数;
[0195]
s06,将新旧粒子群合并排序,并确定最优个体;
[0196]
s07,确定达到迭代次数或预定收敛精度的情况下,输出最优个体,否则循环至s04。
[0197]
上述程序实现的方法的详细步骤与上述各实施例提供的考虑转动惯量约束的受端电网机组组合方法相同,这里不再赘述。
[0198]
实施例5:
[0199]
本公开实施例提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,处理器执行程序时实现如上述各实施例提供的考虑转动惯量约束的受端电网机组组合方法中的步骤,包括:
[0200]
s01,获取受端电网原始数据以及bpso算法的控制参数,并设定t=0、最大迭代次数t和种群规模n,t为迭代粒子的次数;
[0201]
s02,预处理,形成满足旋转备用约束和开停机时间约束的可行解;
[0202]
s03,在预处理的可行解下,根据二次规划的有效集法进行动态经济调度,并利用清晰等价类进行处理机会约束,同时计算目标函数;
[0203]
s04,计算目标公式,更新粒子群速度和位置,产生新粒子;
[0204]
s05,对产生的新粒子,根据二次规划的有效集法进行动态经济调度,并利用清晰等价类进行处理机会约束,同时计算目标函数;
[0205]
s06,将新旧粒子群合并排序,并确定最优个体;
[0206]
s07,确定达到迭代次数或预定收敛精度的情况下,输出最优个体,否则循环至s04。
[0207]
上述程序实现的方法的详细步骤与上述各实施例提供的考虑转动惯量约束的受端电网机组组合方法相同,这里不再赘述。
[0208]
本领域内的技术人员应明白,本技术公开的实施例可提供为方法、系统或计算机程序产品。因此,本技术可采用硬件实施例、软件实施例或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器和光学存储器等)上实施的计算机程序产品的形式。
[0209]
本技术是参照根据本公开实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0210]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0211]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0212]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于一计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,所述的存储介质可为磁碟、光盘、只读存储记忆体(read-only memory,rom)或随机存储记忆体(random accessmemory,ram)等。
[0213]
以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。