1.本发明属于航天技术领域,尤其涉及一种用于深空探测的固态存储器及存储、读取方法。
背景技术:
2.宇航固态存储器能够为载荷数据采集、存储、在轨处理和回放提供支撑。宇航产品普遍采用三维立体叠封的nand flash作为主要存储介质。其6u尺寸单板设计容量最大3tb,已在地球轨道卫星中广泛应用。
3.与地球轨道卫星特点不同,深空探测任务载荷种类多,传输距离远、数传速率低(几十kbps~几十mbps),数传弧段还受星球位置关系影响。现有宇航存储产品的文件管理方式对载荷数据不分类,记录过程实现按块混存并建立文件号,回放过程按文件号检索下传,下传后地面设备对数据进行分类处理。深空探测应用要求固态存储产品具备更高文件管理精准性、时效性和可靠性,现有星上文件管理方法无法满足其应用需求。
技术实现要素:
4.为解决上述问题,本发明的目的是提供一种用于深空探测的固态存储器,该固态存储器对载荷数据分区缓存,实现文件按页精细化管理,建立文件信息的多维属性,提高了文件检索精准性和时效性,具备mram(magnetoresistive random access memory)故障隔离措施。
5.为实现上述目的,本发明的技术方案为:
6.一种用于深空探测的固态存储器包括:
7.双口ram,用于缓存载荷数据;
8.mram,用于对所述双口ram缓存的载荷数据进行读取、识别和译码;
9.sdram,用于根据所述mram的译码结果将当前载荷数据写入sdram已分区的地址空间;
10.flash,用于在所述sdram任一分区存储的载荷数据达到预设值时,按sdram分区优先级轮询读出并写入flash。
11.对双口ram的第一次读取实现接收的载荷数据的类型识别和译码,通过译码结果切换载荷数据sdram分区地址,对双口ram的第二次读取,将双口ram中数据写入sdram已分区的地址空间。
12.优选的,所述双口ram包括乒缓存和乓缓存,所述乒缓存用于缓存奇数帧数载荷数据,所述乓缓存用于缓存偶数帧数载荷数据。
13.采用乒乓双口ram缓存策略,对输入数据帧计数,按奇偶帧切换乒乓ram地址,奇帧写进乒缓存,乒ram半满请求读出该帧数据2次;读乒ram的同时,乓ram接收偶帧数据,依次循环。
14.优选的,所述mram还用于建立mram的空白页查询和本页的文件信息。在本页数据
memory)设计不降低输入速率的同时也支持对载荷数据进行2次读取操作。
39.给用户数据提供了一种可靠性保障,用于在mram故障时对其进行隔离,仍可以下传无法被mram检索的数据。
附图说明
40.下面结合附图对本发明的具体实施方式作进一步详细说明,其中:
41.图1为本发明的一种用于深空探测的固态存储器示意图;
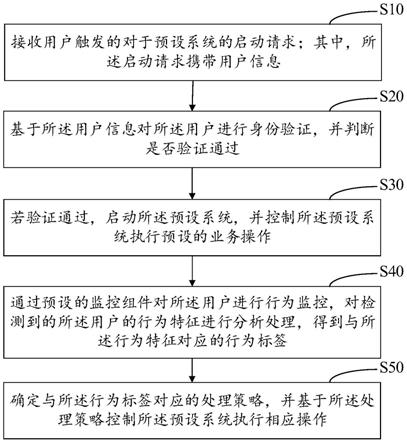
42.图2为本发明的一种用于深空探测的固态存储器存储及读取方法流程图;
43.图3为本发明的缓存通道指针示意图;
44.图4为本发明的乒乓双口ram读写调度实现框图;
45.图5为本发明的固态存储器数据记录过程示意图;
46.图6为本发明的文件的多维属性示意图;
47.图7为本发明的按文件读取方法;
48.图8为本发明的物理地址读取方法。
具体实施方式
49.以下结合附图和具体实施例对本发明作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比率,仅用以方便、明晰地辅助说明本发明实施例的目的。
50.需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
51.第一实施例
52.如图1,本发明的核心是提供一种用于深空探测的固态存储器包括:
53.双口ram,用于缓存载荷数据;
54.mram,用于对所述双口ram缓存的载荷数据进行读取、识别和译码;
55.sdram,用于根据所述mram的译码结果将当前载荷数据写入sdram已分区的地址空间;
56.flash,用于在所述sdram任一分区存储的载荷数据达到预设值时,按sdram分区优先级轮询读出并写入flash。
57.对双口ram的第一次读取实现接收的载荷数据的类型识别和译码,通过译码结果切换载荷数据sdram分区地址,对双口ram的第二次读取,将双口ram中数据写入sdram已分区的地址空间。
58.优选的,所述双口ram包括乒缓存和乓缓存,所述乒缓存用于缓存奇数帧数载荷数据,所述乓缓存用于缓存偶数帧数载荷数据。
59.采用乒乓双口ram缓存策略,对输入数据帧计数,按奇偶帧切换乒乓ram地址,奇帧写进乒缓存,乒ram半满请求读出该帧数据2次;读乒ram的同时,乓ram接收偶帧数据,依次循环。
60.对双口ram的第一次读取实现接收的载荷数据的类型识别和译码,通过译码结果
切换载荷数据sdram分区地址,对双口ram的第二次读取,将双口ram中数据写入sdram已分区的地址空间。当sdram任一分区通道可编程满时根据分区通道优先级进行轮询读操作,并按当前flash写指针查询mram中对应的地址是否为空白页,如果是空白页则将当前缓存中的一页的数据写入flash;如果不是空白页,flash写指针累加1,继续查询mram中对应的地址,直到查询到空白页为止。
61.优选的,所述mram还用于建立mram的空白页查询和本页的文件信息。在本页数据写入flash的过程中,在mram中对应的地址空间记录本页文件的属性信息,具体包含飞行器上当前时间信息、分区通道id信息。
62.优选的,所述固态存储器还包括一路输入接口,用于接收固定格式的多类型载荷数据,并存入所述双口ram。
63.根据文件属性点播指令,按当前flash读指针检索mram中对应的地址空间的页文件属性信息,与点播指令进行比对,将符合检索条件的文件从flash读出,不符合检索条件的地址直接跳过,读地址加1,检索下一个地址;也可根据按上注物理地址点播指令,按flash物理地址,无需检索mram,直接将该地址的文件从flash读出。
64.作为本实施例一种可能的实现方式,所述乒乓双口ram缓存设计基于verilog硬件描述语言,选用反熔丝工艺fpga(filed-programmable gate array,现场可编程门阵列)器件ax2000-1cgs624m中实现。
65.作为本实施例一种可能的实现方式,所述flash选用128gb nand flash器件3dfn128g08,其内部由8片经过严格筛选和辐射加固的micron工业级nand flash芯片mt29f16g08叠装而成。存储板设计3组深度扩展,每组8片并行扩展,单板装机有效容量3tb,flash读写按8级流水,每个流水页大小2mb容量。本发明简称“页”,即为本发明最小文件管理单位。地址深度为3
×
4096
×
128=1572864。
66.作为本实施例一种可能的实现方式,所述mram选用容量64mbits、位宽8bits叠装器件3dmr64m08实现文件管理,其内部由4颗经过筛选的everspin公司的工业级mr4a08bcys35立体叠封而成,其中8根数据线和控制信号线oe、we复用,片选信号线独立,在操作时通过片选信号的选择分层实现读写,即通过片选信号实现容量的4倍扩展。地址深度为2097151,其中寻址范围0~1572863一一对应flash地址。
67.作为本实施例一种可能的实现方式,述sdarm选用容量1gb、位宽32bits叠装器件3dsd1g32vs2141,并对其进行32个32mb的分区,通过轨道标识符scid和虚拟信道标识符vcid识别和译码结果切换sdram分区地址,最大支持32种载荷数据的分区缓存。
68.第二实施例
69.如图2-6所示,本发明提供一种用于深空探测的固态存储器存储方法,包括以下步骤:
70.s1:按ccsds aos格式接收载荷数据,轨道标识符scid和虚拟信道标识符vcid位于固定位置,一帧大小ri=1kb,其中i数据的帧次序,i=1表示第一帧,对载荷数据的特征信息提取。
71.s2:对载荷输入数据帧次序计数,按奇偶帧切换乒乓ram地址,i=奇数帧写进乒缓存,乒ram半满ram
half_full
=1kb请求读出该帧数据2次;读乒ram的同时,乓ram接收i=偶数帧数据,依次循环。
72.s3:双口ram中的第一次读取实现接收的载荷数据的类型识别和译码,通过译码结果切换载荷数据sdram分区地址,对双口ram的第二次读取,将双口ram中数据写入sdram已分区的地址空间。一种实例中对sdram进行32个32mb的分区,第i帧输入数据的写sdram地址计算公式为:addri(n)=baseaddr(n) incaddri(n),其中n=1,2,3......表示32个分区通道,baseaddr(n)表示分区通道基地址取决于载荷数据类型译码,incaddri(n)表示已写入第n通道动态地址,由帧数量决定。
73.s4:如前所述,本发明最小文件管理单位为页2mb(即256kb),当第n通道sdram分区可编程满一页数据sdram
progf
≥256
×ri
=256kb,则按当前flash写指针f
waddr
(x),去查询mram中对应地址m
addr
(x)(记录模式下,m
addr
(x)=f
waddr
(x))内的数据是否为00h值即空白页,如果是00h值则将当前缓存中的一页的数据写入flash;如果是非00h值,则写地址f
waddr
(x)累加1,按累加后的地址m
addr
(x)去请求查询mram中对应地址内的数据是否为00h值,如此循环。其中x表示固态存储器flash寻址空间,本例中x取值范围x=0,1,2......1572863。
74.s5:在该页数据写入f
waddr
(x)的过程中,在mram中对应的地址m
addr
(x)记录本页文件的属性信息,具体包含飞行器上当前时间信息tc(x)、分区通道id信息id(x)其中id(x)=1,2,3......32,与载荷类型一一对应。其中x表示固态存储器mram寻址空间,本例中x取值范围x=0,1,2......1572863。
75.第三实施例
76.如图7所示,基于相同的构思,本发明还提供一种用于深空探测的固态存储器读取方法,包括以下步骤:
77.s1:根据文件属性点播指令内容中的时间范围[t
start
,t
end
]和id,按当前flash读指针f
raddr
(x)检索mram中对应的地址m
addr
(x)(回放模式下,m
addr
(x)=f
raddr
(x))的页文件属性信息tc(x)和id(x)。
[0078]
s2:将tc(x)和id(x)分别与点播指令内容中的时间范围[t
start
,t
end
]和id进行比对,将符合检索条件的文件从f
raddr
(x)读出,即是tc(x)∈[t
start
,t
end
]和id=id(x)。
[0079]
s3:不符合检索条件即是或id≠id(x)的地址f
raddr
(x)直接跳过,读地址f
raddr
(x)加1,进行下一个地址检索。
[0080]
第四实施例
[0081]
如图8所示,基于相同的构思,本发明还提供另外一种用于深空探测的固态存储器读取方法,包括以下步骤:
[0082]
根据按上注物理地址点播指令,按flash物理地址,无需检索mram,直接将该地址的文件从flash读出。
[0083]
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式。即使对本发明作出各种变化,倘若这些变化属于本发明权利要求及其等同技术的范围之内,则仍落入在本发明的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。