1.本发明涉及车辆转向控制技术领域,具体涉及一种基于人机融合感知的矿用搬运车智能转向实现方法。
背景技术:
2.由于井下巷道复杂多变,连采机、掘进机、锚杆机、破碎机及井下重型设备等进出巷道的搬运,一直是个难题,矿用平板动力车系列产品是专为煤矿大型设备运输设计制造的,其是我国在煤矿辅助运输领域的原创型产品,整车综合性能及技术均处于国际领先水平。该车可提高矿用设备运送效率20倍左右,大大降低了生产成本和矿工的劳动强度。
3.矿用设备搬运车,整车分为动力车 连接杆 驱动载货机构三部分组成。动力车为整车提供动力,液压驱动。布置两个驾驶室。后车驱动载货机构由四轴线8个驱动转向轮组成。
4.独立多轮、多驱带转向的驱动方式,虽然转弯半径小,满足了井下狭窄巷道的使用要求,不过其独立多轮的协同控制是个难题,目前人工操作困难,且需要多人配合,成本较高。
5.井下环境巷道情况各异,每个岔道的转向角度不同,需要采取不同的转向策略;井下环境复杂多变,道路坑洼不平,且存在石块矿料脱落、运输过程遗撒等情况,阻碍车辆运行及转向,人眼无法准确识别。
技术实现要素:
6.为此,本发明提供一种基于人机融合感知的矿用搬运车智能转向实现方法,以解决现有井下巷道运输车辆转弯控制困难的问题。
7.为了实现上述目的,本发明提供如下技术方案:
8.本发明公开了一种基于人机融合感知的矿用搬运车智能转向实现方法,所述方法为:
9.车辆在行走状态下,动力车前舱驾驶车辆行走,后舱转动旋钮开关选择相应的转向模式并发送至控制器;
10.控制器接收选择的转向模式,后舱根据道路状况转动方向盘,控制器将方向盘转动情况换算为后车载货机构的车轮转向角;
11.控制器控制后车载货机构八个转向轮进行相应角度的转向,转向轮的旋转编码器采集实际转向角度;
12.摄像头将车轮周围环境情况通过视频图像的形式传输到车载显示屏上,并且在车载显示屏上显示车轮的转向角度、状态、车辆异常报警信息;
13.后舱根据显示屏显示内容调整方向盘角度进行修正,并通过语音与前舱互动沟通,协调同步驾驶,优化行驶角度,形成闭环控制。
14.进一步地,所述旋钮开关选择的转向模式包括:前轮转向模式、八字转向模式和斜
行模式。
15.进一步地,所述前轮转向模式为前两排轮胎转向,后两排轮胎直行,转向角度不大于45度,由系统根据采集的方向盘转角经算法优化后控制后车各轮转向,同时结合转轮编码器反馈优化调整。
16.进一步地,所述八字转向模式为四排轮胎同时转向,转向角度为八字形,转向角度不大于45度,由系统根据采集的方向盘转角经算法优化后控制后车各轮转向,同时结合转轮编码器反馈优化调整。
17.进一步地,所述斜行模式为四排轮胎同时转向,轮胎转向角度相同四排轮胎同时转向,转向角度不大于45度,由系统根据采集的方向盘转角经算法优化后控制后车各轮转向,同时结合转轮编码器反馈优化调整。
18.进一步地,所述控制器采集后舱方向盘转动的角度,并将方向盘转动的角度进行换算,后车载货机构设置有八个车轮,根据方向盘转动角度,控制每个车轮的转动方向和角度。
19.进一步地,所述后车载货机构的八个车轮均连接转向机构液压系统,通过转向机构液压系统调整转向轮的转动角度,在每个转向轮上均安装有旋转编码器,通过旋转编码器采集转向轮的实际旋转角度,并发送至控制器。
20.进一步地,所述后车载货机构上安装有多个摄像头,通过摄像头采集转向轮周围的环境图像,并将采集的图像信息发送至车载显示屏上。
21.进一步地,所述控制器根据旋转编码器采集的转向轮实际旋转角度和摄像头采集的转向轮周围环境图像,进行智能分析,给出进一步的调整建议,后舱根据调整建议进行方向调整。
22.进一步地,所述控制器还连接有语音通信模块,通过语音通信模块实现前舱和后舱的通信。
23.本发明具有如下优点:
24.本发明公开了一种基于人机融合感知的矿用搬运车智能转向实现方法,实现独立多轮自动跟随方向盘智能调整各自转向角度,减少人工操作困难,提高效率,降低人工成本;接触传感器和视频信息,可以辅助人工有效识别障碍物,调整驾驶方式,避开障碍,实现高效转弯;系统预设三种高效转弯模式,同时具备机器学习能力,能够不断学习人工的操作,优化转向模式;人机协同感知,避免了单独依赖机器的复杂算法,同时有效利用人的灵活性,人机协同再提高效率的同时扩充了系统对复杂环境的适应性。
附图说明
25.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引申获得其它的实施附图。
26.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功
效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
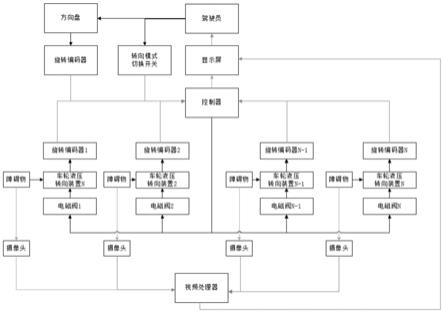
27.图1为本发明实施例提供的一种基于人机融合感知的矿用搬运车智能转向实现方法的整体架构图;
28.图2为本发明实施例提供的一种基于人机融合感知的矿用搬运车智能转向实现方法的流程图;
29.图3为本发明实施例提供的前轮转向模式示意图;
30.图4为本发明实施例提供的八字转向模式示意图;
31.图5为本发明实施例提供的斜行模式示意图。
具体实施方式
32.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.实施例
34.参考图1-图5,本实施例公开了一种基于人机融合感知的矿用搬运车智能转向实现方法,所述方法为:
35.车辆在行走状态下,动力车前舱驾驶车辆行走,后舱转动旋钮开关选择相应的转向模式并发送至控制器;
36.控制器接收选择的转向模式,后舱根据道路状况转动方向盘,控制器将方向盘转动情况换算为后车载货机构的车轮转向角;
37.控制器控制后车载货机构八个转向轮进行相应角度的转向,转向轮的旋转编码器采集实际转向角度;
38.摄像头将车轮周围环境情况通过视频图像的形式传输到车载显示屏上,并且在车载显示屏上显示车轮的转向角度、状态、车辆异常报警信息;
39.后舱根据显示屏显示内容调整方向盘角度进行修正,并通过语音与前舱互动沟通,协调同步驾驶,优化行驶角度,形成闭环控制。
40.旋钮开关选择的转向模式包括:前轮转向模式、八字转向模式和斜行模式。
41.前轮转向模式为前两排轮胎转向,后两排轮胎直行,转向角度不大于45度,由系统根据采集的方向盘转角经算法优化后控制后车各轮转向,同时结合转轮编码器反馈优化调整。
42.其中转向角度的计算以转向点圆形(o),转向轮的中心点为(ai i=1-n),oai与中心轴线的夹角为转向角,ai与转向点o的距离,呈现一定的规律性,该角度与方向盘的转角呈现一定的对应关系(方向盘转3圈对应45度转角)。在转向过程中符合阿克曼原理。
43.阿克曼原理为:汽车在行驶过程中,每个车轮的运动轨迹都必须完全符合它的自然运动轨迹,从而保证轮胎与地面间处于纯滚动而无滑移现象。
44.在车轮转动过程中,车轮是绕着主销进行旋转的。如果要实现左右轮转角不一致,就要有一套特定的转向机构,如果这套机构是平行四边形的话,可以看到,左右前轮转角始终都是保持相同的角度,它们的轴线是不会交于一点的,这时候车辆转向时四个轮就不会
绕着同一个点纯滚动。如果把平行四边形的内点往里移动的话,这时候会发现前轮的左右转角不一样了。在某一个特定转角情况下,前轮的虚拟轴线和后轮的虚拟轴线会同时相交于一点,此时,车辆的四个车轮就能绕着这个点做纯滚动运动。这种,理论上能让四个轮绕着某一点纯滚动的转向机构,我们叫转向梯形,也叫阿克曼几何。转向梯形内点是指转向拉杆外球头点,转向梯形外点就是外球头点到主销垂线的垂足,在水平方向上的投影点。这四个点形成的梯形结构。
45.转向梯形在满足阿克曼几何的情况下,理论上四个车轮是能绕着同一个点转向的。但是车辆在中高速行驶过程中,因为轮胎的刚度,会产生一个侧偏角,这个侧偏角会使你的轮胎在实际转向过程中,不会按照设计的理论转角旋转,会产生一定的偏差。这时候车轮并是不做纯滚动,可能就会造成偏磨。而且阿克曼的设计和车辆风格以及操控性都有关系,所以在整车设计中,并不是按照阿克曼几何进行设计的。而是在这基础上,对车轮转角进行一定的调整。
46.所以在设计中会引入一个阿克曼校正率的概念。阿克曼率就是实际内外轮的转角差比上理论内外轮转角差。当转向梯形满足阿克曼几何特征时,车轮绕着特定的交点做圆周滚动,这时候它的阿克曼率就是100%,而且这时候转向梯形的两条侧边的延长线也会交于后轴的中点。当阿克曼率越小的时候,梯形边的交点相对于后轴越靠后的地方。本技术中基于多轮独立驱动,可以实现多轮独立转向。满足在地下巷道转弯需求。
47.八字转向模式为四排轮胎同时转向,转向角度为八字形,转向角度不大于45度,由系统根据采集的方向盘转角经算法优化后控制后车各轮转向,同时结合转轮编码器反馈优化调整。
48.斜行模式为四排轮胎同时转向,轮胎转向角度相同四排轮胎同时转向,转向角度不大于45度,由系统根据采集的方向盘转角经算法优化后控制后车各轮转向,同时结合转轮编码器反馈优化调整。
49.控制器采集后舱方向盘转动的角度,并将方向盘转动的角度进行换算,后车载货机构设置有八个车轮,根据方向盘转动角度,控制每个车轮的转动方向和角度。由于井下巷道内道路狭窄,转弯时,每个车辆需要对应不同的角度,才能有助于后车载货机构利用最小的转弯半径进行快速转弯,提升转弯效率。
50.后车载货机构的八个车轮均连接转向机构液压系统,通过转向机构液压系统调整转向轮的转动角度,在每个转向轮上均安装有旋转编码器,通过旋转编码器采集转向轮的实际旋转角度,并发送至控制器。由于井下复杂的巷道环境,路面坑洼或有障碍物的存在,会导致实际的转向角度与预设角度不同,相关情况会通过反馈给控制器,优化控制策略。
51.后车载货机构上安装有多个摄像头,通过摄像头采集转向轮周围的环境图像,并将采集的图像信息发送至车载显示屏上,在车载显示屏显示车轮的转向角度、状态、车辆异常报警等信息。
52.控制器根据旋转编码器采集的转向轮实际旋转角度和摄像头采集的转向轮周围环境图像,进行智能分析,给出进一步的调整建议,后舱根据调整建议进行方向调整。控制器还连接有语音通信模块,通过语音通信模块实现前舱和后舱的语音沟通。协调同步调整驾驶策略,相关的操作会再次被系统采集,并优化行驶角度,形成闭环控制,保证实现复杂巷道环境下的智能转向。
53.本实施例公开的一种基于人机融合感知的矿用搬运车智能转向实现方法,实现独立多轮自动跟随方向盘智能调整各自转向角度,减少人工操作困难,提高效率,降低人工成本;接触传感器和视频信息,可以辅助人工有效识别障碍物,调整驾驶方式,避开障碍,实现高效转弯;系统预设三种高效转弯模式,同时具备机器学习能力,能够不断学习人工的操作,优化转向模式;人机协同感知,避免了单独依赖机器的复杂算法,同时有效利用人的灵活性,人机协同再提高效率的同时扩充了系统对复杂环境的适应性。
54.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
