1.本发明涉及作业运输领域,具体地,涉及一种吊斗车的智能调度模型及系统及方法。
背景技术:
2.目前钢铁企业采用吊斗设置用于回收矿石、煤炭、废钢、污泥、工业垃圾等料种,按照30∶1的配置模式配备吊斗车负责拉运吊斗。一种方式为各生产厂部人员通过微信或者电话方式联系汽运调度告知满斗信息并进行相应地吊斗车请车,汽运调度安排吊斗车前往清运,另一种方式通过吊斗车进行巡检,发现斗满后司机根据以往经验进行相应地清运。
3.由于吊斗在企业内布点分散,装卸点分布不均衡、并且吊斗装载实际情况汽运调度无法及时掌握,主要依靠电话及微信传递信息,同时也存在着委托方吊斗装载不规范,导致吊斗车运输作业效率低下,严重制约车辆周转效率并造成车辆到位不及时而引发用户抱怨。专利文献cn104994144a公开了一种网络负载平衡的多节点拼车系统,传统的车辆调度方法多针对于客运车辆,其方案都无法应用于生产环境中。因此,需要研发一种适用于生产环境的智能调度系统。
技术实现要素:
4.针对现有技术中的缺陷,本发明的目的是提供一种吊斗车智能调度系统及方法。
5.根据本发明提供的一种吊斗车智能调度系统,包括:
6.车辆户籍管理模块:管理吊斗车的可装料种和放置的定点斗位,根据吊斗车的用途分为固定斗和临时斗,固定斗维护设定的业务类型,临时斗不限定业务类型;
7.区域管控模块:根据预设因素划分出多个配车管控区域;
8.车辆配置模块:根据工序物流的业务类型、业务量、运输距离以及运输范围将吊斗车划分至相应的配车管控区域,对每个配车管控区域的吊斗车配置运输优先级;
9.车辆调度模块:获取所有斗满指令,形成对应配车管控区域的作业指令;
10.智能调度模块:根据所述作业指令,通过智能调度模型计算得到对应配车管控区域中最合适的吊斗车,将所述作业指令传输至所述最合适的吊斗车。
11.优选地,所述预设因素包括:业务分类、库区位置或产品种类;
12.一个业务分类对于一个运输业务,一个运输业务只能被设置于一个配车管控区域,一个配车管控区域被设置有一个或多个运输业务。
13.优选地,所述车辆配置模块中,一个吊斗车被划分至一个或多个配车管控区域,每个配车管控区域被划分一个或多个吊斗车。
14.优选地,还包括:
15.斗满操作端,能够发出所述斗满指令至所述车辆调度模块。
16.优选地,所述吊斗车包括车载终端,能够获取所述车辆调度模块发出的所述作业指令。
17.根据本发明提供的一种吊斗车智能调度方法,包括:
18.车辆户籍管理步骤:管理吊斗车的可装料种和放置的定点斗位,根据吊斗车的用途分为固定斗和临时斗,固定斗维护设定的业务类型,临时斗不限定业务类型;
19.区域管控步骤:根据预设因素划分出多个配车管控区域;
20.车辆配置步骤:根据工序物流的业务类型、业务量、运输距离以及运输范围将吊斗车划分至相应的配车管控区域,对每个配车管控区域的吊斗车配置运输优先级;
21.车辆调度步骤:获取所有斗满指令,形成对应配车管控区域的作业指令;
22.智能调度步骤:根据所述作业指令,通过智能调度模型计算得到对应配车管控区域中最合适的吊斗车,将所述作业指令传输至所述最合适的吊斗车。
23.优选地,所述预设因素包括:业务分类、库区位置或产品种类;
24.一个业务分类对于一个运输业务,一个运输业务只能被设置于一个配车管控区域,一个配车管控区域被设置有一个或多个运输业务。
25.优选地,所述车辆配置步骤中,一个吊斗车被划分至一个或多个配车管控区域,每个配车管控区域被划分一个或多个吊斗车。
26.优选地,通过斗满操作端发出所述斗满指令。
27.优选地,所述吊斗车包括车载终端,能够获取所述车辆调度步骤发出的所述作业指令。
28.与现有技术相比,本发明具有如下的有益效果:
29.本发明可以实现对吊斗车运输作业全流程跟踪及管控,同时通过吊斗车智能调度功能,实现了系统对作业指令的自动分配,从而使得车辆调度人员只需对班中异常情况进行干预,可以大大提高工作效率。
30.通过各生产厂部相关人员发送斗满信息,可以有效地减少吊斗车厂内巡检作业,提高车辆实用性及利用率,减少运输成本。
31.通过本发明进行企业内吊斗车运输作业,为后续与无人车运输作业,以及为企业向无人化、智能化迈进提供了有利支撑。
附图说明
32.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
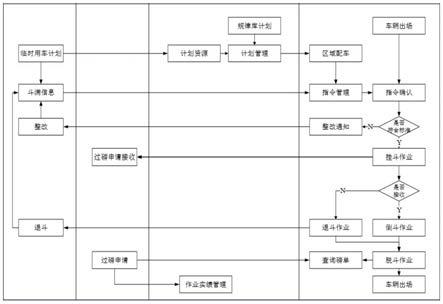
33.图1为本发明的工作流程图。
具体实施方式
34.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
35.如图1所示,本发明提供的一种吊斗车智能调度系统,包括:
36.车辆户籍管理模块:
37.将吊斗车按照装载料种和位置进行管理,即限定吊斗车可装料种(矿石、煤炭、废
钢、污泥、工业垃圾等货物),以及吊斗车放置的定点斗位,并设置编号;同时根据斗的用途,分为固定斗、临时斗,对于固定斗维护具体运输业务,即该类斗专斗专用,临时斗不限定具体运输业务,只是在下达计划时临时斗配置到该计划下即可。通过上述设置,各生产厂作业人员使用斗满app进行斗满操作时即可以直接生成斗满运输指令,从而以便于吊斗车司机接收到及时正确的吊斗位置及吊斗装载情况。
38.车辆户籍管理模块维护场内的吊斗基础信息,以及吊斗号与运输业务的对应关系,把固定斗和临时斗区分出来,固定斗可以直接对应运输业务,临时斗需要将斗与计划做匹配关系。
39.区域管控模块:
40.根据厂内工序物流的业务分类、库区位置、产品种类等多种因素划分配车管控区域,配车管控区域可以是一个虚拟非实地的区域,例如原料区域污泥较多,原料车禁止进入成品区域内进行吊斗运输作业;同时对于装运湿料的吊斗也禁止混用以避免造成混料。
41.区域管控模块用于维护配车管控区域时,维护配车管控区域与运输业务的一对多关系,即一个运输业务只能维护在一个吊斗管控区域,一个吊斗管控区域可以有多个运输业务。
42.区域管控模块用于维护吊斗车时,维护吊斗车与配车管控区域关系,吊斗车与配车管控区域的关系为多对多关系,即一辆吊斗车可以放置在多个配车管控区域内,也可以一个配车管控区域可以有多辆吊斗车。
43.区域管控模块根据厂内工序物流的业务分类、库区位置、产品种类等多种因素划分配车区域,再根据业务类型、业务量、运输距离及运输范围,合理分配车辆,最后维护维护吊斗车管控区域与运输业务的对应关系,一个运输业务只能维护在一个吊斗管控区域,一个吊斗管控区域可以有多个运输业务。
44.车辆调度模块:
45.车辆调度模块用于指令管理:根据各生产厂部操作斗满app,以实现斗满指令的统一管理,从而满足管理人员对每一条斗满信息进行全流程的管控,并且形成该吊斗管控区域内的作业指令队列。
46.车辆调度模块用于智能调度:建立智能调度指标体系,在体系范围内为智能调度指令模型提供最优方案。智能调度指标即影响指令生成规则的各个因素,主要包括:斗满时间、距离、优先级、斗位情况和斗户籍等,各项指标均可配置影响权重,权重按区域维护,权重比例越小,该作业指令越紧急。通过智能调度模型(吊斗车配车模型)计算各吊斗管控区域内的作业指令按照斗满时间、距离、优先级、斗位情况、斗户籍等信息,将指令直接下发到最合适吊斗车的车载终端上,以实现吊斗车智能车辆调度。
47.吊斗车配车模型依照货名、装点、卸点等关键项为运输任务基础,配以计划车种、计费方式、配车优先级等基准配车信息,通过吊斗车配车模型可以实现车辆调度人员只对班中异常作业情况进行干预及车辆调整,从而大大减轻车辆调度人员的工作压力。
48.车辆调度模块接收由各个生产厂业务人员,通过斗满app下发的斗满信息,自动生成指令,通过智能调度模型算法把指令分配到指定车辆上,遇到临时紧急情况,可以人工新增指令,下发到指定车辆上作业,针对人工新增的指令可以修改和删除,全场的指令如果有不需要作业的指令,由调度人员把指令强制结束。
49.v={v1,v2,...,vn}={指令1,指令2,...,指令n}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.1)
50.而其中的斗满时间、距离、优先级、斗位情况、斗户籍等各因素指标需人工维护相应的系数:
51.a=(α1,α2,α3,α4,α5)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.2)
52.则斗满指令的五个因素指标为:
53.v
ij
=(v
1j
,v
2j
,v
3j
,v
4j
,v
5j
)
t i=(1,2,3,4,5),j=(1,2,...,n)
ꢀꢀꢀ
(1.3)
[0054]vij
也可以用因素指标矩阵表示:
[0055][0056]
则相对偏差值δ
ij
为:
[0057]
δ
ij
=(v
imax-v
ij
)/(v
imax-v
imin
)i=(1,2,3,4,5),j=(1,2,...,n)
ꢀꢀꢀ
(1.4)
[0058]
其中:
[0059]vimax
=max{v
i1
,v
i2
,...,v
in
}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.5)
[0060]
则相对偏差值δ
ij
作为元素可构成相对偏差矩阵:
[0061][0062]
对于待下达的吊斗车指令最优选择,则转换为计算吊斗指令因素指标相对偏差值的加权平均值:
[0063][0064]
当某个相对偏差值的加权平均值为最小值时,则该指令为当前车辆的最合适指令:
[0065]
βj=βj(vj,v
max
)=min{β1,β2,...,βn}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.7)
[0066]
斗满app:
[0067]
斗满app为各生产厂部人员操作的手机端应用,通过该app实现厂部人员实时进行斗满信息的发送。
[0068]
斗满app可以通过扫一扫,用手机摄像头扫描吊斗上面的二维码,自动识别出吊斗的对应信息,验证信息无误之后点击斗满下发,指令会自动生成。
[0069]
吊斗车app:
[0070]
吊斗车app为吊斗车司机操作的手机终端应用,通过该app实现吊斗车司机按按照派单指令模式进行运输作业,同时该app具备指令推送、吊斗整改、退斗申请等功能。
[0071]
吊斗车司机初始第一次登陆平板时候,需要选择车辆做绑定,之后登陆平板后将
会自动带出车号。当收到新的推送时,画面自动弹出指令及磅单信息且有语音提示。吊斗车司机点击指令确认后吊斗车处于开始作业中,前往装点进行作业,吊斗放回指定位置后点击卸斗按钮,表示该次吊斗车运输作业完成,系统将根据调度模型将新运输指令下达到吊斗车app上。
[0072]
对于吊斗装车不规范的情况,司机可以拍摄不符规定的吊斗装载照片,并选择异常原因,将信息通过系统反馈给需要整改要求给厂部。整改发送后该条指令已结束,选择作业指令画面,终端重新接收新的指令。
[0073]
本发明基于.net c#\c 技术,支持c/s架构,可灵活部署在unix、windows、linux等操作系统上,支持oracle、db2、sqlserver等主流数据库。吊斗车智能调度模型及系统在设计时充分考虑了软件的低耦合、高内聚的软件设计特性,既可以独立形成系统运行,也可以作为运输物流系统的嵌入式模块,实现物流业务数据的无缝衔接。
[0074]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
[0075]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。