技术特征:
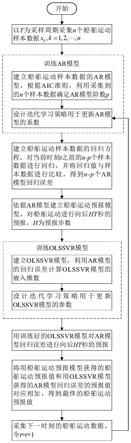
1.一种基于ar-olssvr模型的船舶运动预报方法,其特征在于:包括以下步骤:a、以t为采样周期采集船舶运动数据,得到n个样本数据x
k
,k=1,2,
…
,n;所述的船舶运动包括横摇运动、纵摇运动和升沉运动;b、建立并训练ar模型;b1、建立船舶运动样本数据的ar模型如下:式中,p为ar模型的待定阶数,a
i
为ar模型的待定系数,记a=[a1,a2,
…
,a
p
]
t
为ar模型的待定系数向量,e
k
为ar模型的误差;b2、根据akaike信息量准则确定p的值;首先,为ar模型定义akaike信息量准则函数aic(
·
)如下:aic(p)=nln(ξ2) 2p
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)式中,ξ2表示ar模型误差方差,为ar模型的待定系数向量的估计值,ln(
·
)表示自然对数;假设ar模型的最大阶数为p
max
,且0<p≤p
max
<n,依次计算aic(1),
…
,aic(p
max
)的值,若这些值中的最小值为aic(p
*
),则确定ar模型的阶数p=p
*
;b3、对提出如下在线迭代学习策略:式中,t为当前采样时刻,q为p
×
p的设计常数矩阵,x(t-1)=[x
t-2
,x
t-3
,
…
,x
t-1-p
]
t
,i为p
×
p的单位矩阵,g(t-1)为p维的增益向量,c(t-1)为p
×
p的协方差矩阵,r为设计常数;c、依据ar模型,建立船舶运动样本数据的回归方程:式中,为样本数据x
k
的回归值;通过式(5)对当前时刻t之前的n-p个样本数据进行回归,并将样本数据与其回归值进行比较,得到n-p个ar模型回归误差:式中,e
reg,k
为ar模型回归误差;d、依据ar模型,建立船舶运动预报模型如下:
式中,h为预报步数,为向后ht秒的预报值;e、建立olssvr模型如下:式中,e
t
=[e
reg,p m 1
,e
reg,p m 2
,
…
,e
reg,n
],m为嵌入维数,2≤m<n-p,ω
j
,j=p 1,
…
,n-m,为olssvr的模型系数,记m=n-m-p,记ω=[ω
p 1
,ω
p 2
,
…
,ω
j
,
…
,ω
n-m
]为olssvr模型的系数向量,b为偏置项,记b=[b,
…
,b]为m维的偏置项向量,其中,为径向基核函数,e
j
=[e
reg,j
,e
reg,j 1
,
…
,e
reg,j m-1
],嵌入维数m计算方法如下:首先,令m=2,计算回归误差的关联维数d(m):式中,d(e
u
,e
v
)为向量e
u
与e
v
之间的欧氏距离,r为m维欧氏空间中以e
u
为中心的球域ω的半径,h(
·
)为单位阶跃函数;然后,令m=m 1,继续依式(9)计算回归误差的关联维数d(m),直至前后两次关联维数的差小于10-3
为止,此时的m即为嵌入维数;依据最小二乘算法原理,设计olssvr模型的系数向量和偏置项的迭代公式如下:
式中,σ1=[1,1,
…
,1]
t
为m维的列向量,u(t)=u(t-1) r1(t)r1(t)
t
z1(t),其中:f(t-1)=[k(e
t-m
,e
t-m-1
) 1/c,
…
,k(e
t-m-m 2
,e
t-m-1
)]
t
,f(t-1)=k(e
t-m
,e
t-m
)/c,c为惩罚因子,r1(t)=[v(t)
t
w(t-1)-1
,-1]
t
,v(t)=[k(e
t-m 1
,e
t-m-m 2
),
…
,k(e
t-m 1
,e
t-m
)]
t
,v(t)=k(e
t-m 1
,e
t-m 1
) 1/c;利用步骤c中获得的n-p个ar模型回归误差,通过式(10)和式(11)计算出和依据olssvr模型,建立ar模型回归误差e
reg,k
的预报模型:式中,h为预报步数,为向后ht秒的预报值;f、将用船舶运动预报模型(7)获得的船舶运动预报值和用olssvr模型获得的ar模型回归误差预报值对应相加,得到:式中,为修正后的船舶运动预报值,作为最终的船舶运动预报值;g、采集新的船舶运动数据,令t=t 1,转到步骤b3,继续进行下一ht秒的预报。
技术总结
本发明公开了一种基于AR-OLSSVR模型的船舶运动预报方法,包括以下步骤:建立并训练AR模型;依据AR模型,建立船舶运动样本数据的回归方程并建立船舶运动预报模型;建立OLSSVR模型;将用船舶运动预报模型获得的船舶运动预报值和用OLSSVR模型获得的AR模型回归误差预报值对应相加,作为最终的船舶运动预报值。本发明采用迭代学习策略对船舶运动预报模型和回归误差预报模型参数进行实时更新,每次参数更新时,只需要利用上一次的结果通过迭代的方式计算得到,不需要重新利用大量样本数据进行训练,提高了预报模型的运算速度,实现了船舶运动的在线预报。本发明采用双模型预报,提高了船舶运动预报的精度。船舶运动预报的精度。船舶运动预报的精度。
技术研发人员:杜佳璐 薛兴 李健
受保护的技术使用者:大连海事大学
技术研发日:2022.01.28
技术公布日:2022/6/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。