一种基于ar-olssvr模型的船舶运动预报方法
技术领域
1.本发明涉及船舶与海洋工程技术领域,具体为一种将迭代学习算法、自回归(autoregressive,ar)模型和在线最小二乘支持向量回归(online least squares support vector regression,olssvr)模型相融合的船舶运动预报方法。
背景技术:
2.海上廊桥作为一种海上换乘装备,相当于一个海上通道,方便人员在宿主船与目标船或海上平台之间进行换乘。在进行海上换乘时,船舶受风、浪、流等海洋环境影响会产生横荡、纵荡、升沉、横摇、纵摇和艏摇六个自由度的运动,给海上人员换乘造成安全隐患。船舶的横荡、纵荡和艏摇运动可由动力定位系统进行补偿,而横摇、纵摇和升沉运动则需要通过海上廊桥来进行补偿,以使廊桥始终保持平稳,就像在陆地上一样,为海上人员安全换乘提供保障。为提高海上廊桥的波浪补偿控制精度,实现由波浪等海洋环境引起的船舶横摇、纵摇和升沉运动对海上廊桥的扰动的同步补偿,需要对船舶运动进行实时的极短期预报。
3.中国发明专利cn103926932a(实审)公开了一种船舶运动姿态分解域智能预报方法,通过将数据预处理方法与神经网络结合,实现船舶运动预报。中国发明专利cn111709140a(实审)公开了一种基于内在可塑性回声状态网络的船舶运动预报方法,应用新型的回声状态网络实现了船舶运动预报。然而,上述专利均不能实现在线预报。中国发明专利cn113156815a(实审)公开了一种数据驱动的海上船舶运动姿态实时预报方法,通过将滑动窗口和神经网络结合,实现了在线预报,但此方法的时间成本大。此外,上述专利均采用单一的预报模型进行训练和预报,对于具有非线性非平稳特性的船舶运动数据难以充分捕捉其特征信息,难以满足高精度预报的实际需求。
技术实现要素:
4.为解决上述问题,本发明提出一种基于ar-olssvr模型的船舶运动预报方法,以实现船舶运动的在线预报,减少模型运算时间,提高预报精度。
5.为了实现上述目的,本发明的技术方案如下:
6.一种基于ar-olssvr模型的船舶运动预报方法,包括以下步骤:
7.a、以t为采样周期采集船舶运动数据,得到n个样本数据xk,k=1,2,
…
,n;所述的船舶运动包括横摇运动、纵摇运动和升沉运动;
8.b、建立并训练ar模型;
9.b1、建立船舶运动样本数据的ar模型如下:
[0010][0011]
式中,p为ar模型的待定阶数,ai为ar模型的待定系数,记a=[a1,a2,
…
,a
p
]
t
为ar模型的待定系数向量,ek为ar模型的误差;
[0012]
b2、根据akaike信息量准则确定p的值;
[0013]
首先,为ar模型定义akaike信息量准则函数aic(
·
)如下:
[0014]
aic(p)=nln(ξ2) 2p
ꢀꢀꢀ
(2)
[0015][0016]
式中,ξ2表示ar模型误差方差,为ar模型的待定系数向量的估计值,ln(
·
)表示自然对数;假设ar模型的最大阶数为p
max
,且0<p≤p
max
<n,依次计算aic(1),
…
,aic(p
max
)的值,若这些值中的最小值为aic(p
*
),则确定ar模型的阶数p=p
*
;
[0017]
b3、对提出如下在线迭代学习策略:
[0018][0019]
式中,t为当前采样时刻,q为p
×
p的设计常数矩阵,x(t-1)=[x
t-2
,x
t-3
,
…
,x
t-1-p
]
t
,i为p
×
p的单位矩阵,g(t-1)为p维的增益向量,c(t-1)为p
×
p的协方差矩阵,r为设计常数;
[0020]
c、依据ar模型,建立船舶运动样本数据的回归方程:
[0021][0022]
式中,为样本数据xk的回归值。
[0023]
通过式(5)对当前时刻t之前的n-p个样本数据进行回归,并将样本数据与其回归值进行比较,得到n-p个ar模型回归误差:
[0024][0025]
式中,e
reg,k
为ar模型回归误差。
[0026]
d、依据ar模型,建立船舶运动预报模型如下:
[0027][0028]
式中,h为预报步数,为向后ht秒的预报值;
[0029]
e、建立olssvr模型如下:
[0030][0031]
式中,e
t
=[e
reg,p m 1
,e
reg,p m 2
,
…
,e
reg,n
],m为嵌入维数,2≤m<n-p,ωj,j=p 1,
···
,n-m,为olssvr的模型系数,记m=n-m-p,记ω=[ω
p 1
,ω
p 2
,
···
,ωj,
···
,ω
n-m
]为olssvr模型的系数向量,b为偏置项,记b=[b,
…
,b]为m维的偏置项向量,
[0032][0033]
其中,为径向基核函数,ej=[e
reg,j
,e
reg,j 1
,
…
,e
reg,j m-1
],
[0034][0035]
嵌入维数m计算方法如下:
[0036]
首先,令m=2,计算回归误差的关联维数d(m):
[0037][0038]
式中,d(eu,ev)为向量eu与ev之间的欧氏距离,r为m维欧氏空间中以eu为中心的球域ω的半径,h(
·
)为单位阶跃函数;
[0039]
然后,令m=m 1,继续依式(9)计算回归误差的关联维数d(m),直至前后两次关联维数的差小于10-3
为止,此时的m即为嵌入维数。
[0040]
依据最小二乘算法原理,设计olssvr模型的系数向量和偏置项的迭代公式如下:
[0041][0042][0043]
式中,σ1=[1,1,
…
,1]
t
为m维的列向量,u(t)=u(t-1) r1(t)r1(t)
t
z1(t),其中:
[0044][0045]
f(t-1)=[k(e
t-m
,e
t-m-1
) 1/c,
…
,k(e
t-m-m 2
,e
t-m-1
)]
t
,f(t-1)=k(e
t-m
,e
t-m
)/c,c为惩罚因子,r1(t)=[v(t)
t
w(t-1)-1
,-1]
t
,v(t)=[k(e
t-m 1
,e
t-m-m 2
),
…
,k(e
t-m 1
,e
t-m
)]
t
,v(t)=k(e
t-m 1
,e
t-m 1
) 1/c;
[0046]
利用步骤c中获得的n-p个ar模型回归误差,通过式(10)和式(11)计算出和依据olssvr模型,建立ar模型回归误差e
reg,k
的预报模型:
[0047][0048]
式中,h为预报步数,为向后ht秒的预报值。
[0049]
f、将用船舶运动预报模型(7)获得的船舶运动预报值和用olssvr模型获得的ar模型回归误差预报值对应相加,得到:
[0050][0051]
式中,为修正后的船舶运动预报值,作为最终的船舶运动预报值。
[0052]
g、采集新的船舶运动数据,令t=t 1,转到步骤b3,继续进行下一ht秒的预报。
[0053]
与现有技术相比,本发明具有以下有益效果:
[0054]
1、本发明采用迭代学习策略对船舶运动预报模型和回归误差预报模型参数进行实时更新,每次参数更新时,只需要利用上一次的结果通过迭代的方式计算得到,不需要重新利用大量样本数据进行训练,提高了预报模型的运算速度,实现了船舶运动的在线预报。
[0055]
2、本发明采用双模型预报的思想,避免了单一预报模型难以充分捕捉具有非线性非平稳特性的船舶运动数据的特征信息的弊端,使得特征信息得到了有效的利用,提高了船舶运动预报的精度。
附图说明
[0056]
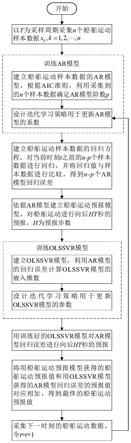
图1为本发明提出的一种基于ar-olssvr模型的船舶运动预报方法流程图。
[0057]
图2为采样周期t=200ms时,应用本发明提出的方法和其他方法对船舶横摇运动进行预报的预报值平均绝对百分比误差对预报时长的变化曲线。
具体实施方式
[0058]
下面结合附图对本发明进行进一步地描述。按照图1所示流程,以船舶横摇运动为例,采样周期t=200ms,样本数据个数n=500的情况下,分别利用ar模型、olssvr模型、经验模态分解-自回归(emd-ar)模型和本发明提出的ar-olssvr模型对船舶横摇运动进行预报,预报时长分别取为1s、3s、5s,所获得预报值的平均绝对百分比误差关于预报时长的变化曲线如图2所示。从图中曲线可以看出,本发明提出的方法预报精度最高。
[0059]
本发明不局限于本实施例,任何在本发明披露的技术范围内的等同构思或者改变,均列为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。