技术特征:
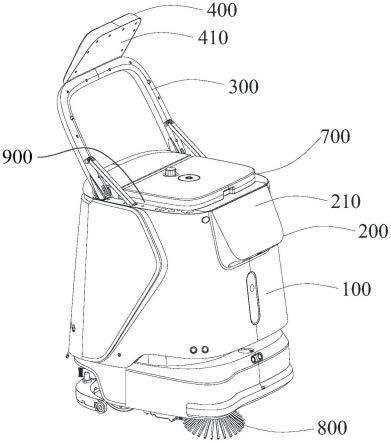
1.一种机器人,其特征在于,包括:机器人本体;活动件,所述活动件可活动设置在所述机器人本体上,所述活动件上设置有随动件,所述随动件适于跟随所述活动件在远离所述机器人本体的第一支撑位和靠近所述机器人本体的第二支撑位之间移动;承载台,所述承载台凸设于所述机器人本体上,所述承载台用于在所述随动件位于所述第二支撑位时对所述随动件进行承载。2.根据权利要求1所述的机器人,其特征在于,所述活动件为扶手;和/或,所述随动件为显示屏。3.根据权利要求1所述的机器人,其特征在于,所述活动件转动或者滑动设置在所述机器人本体的顶部。4.根据权利要求1所述的机器人,其特征在于,所述机器人本体包括壳体,所述承载台凸出设于所述壳体的外侧壁上。5.根据权利要求4所述的机器人,其特征在于,所述承载台包括用于支撑所述随动件的承载面,沿所述机器人本体顶部到底部的方向,所述承载面向外侧倾斜延伸。6.根据权利要求1至5任一项所述的机器人,其特征在于,所述活动件整体呈“u”形,所述活动件的开口端铰接在所述机器人本体上,所述随动件设于所述活动件的闭口端的外侧。7.根据权利要求3所述的机器人,其特征在于,在所述随动件位于所述第二支撑位时,所述活动件位于所述机器人本体的顶部的上侧,且所述活动件与所述机器人本体的顶部之间存在间隙。8.根据权利要求3所述的机器人,其特征在于,所述机器人本体的顶部设有收容槽,所述收容槽用于在所述随动件位于所述第二支撑位时对所述活动件进行收容。9.根据权利要求1至5任一项所述的机器人,其特征在于,所述承载台上设有检测件,所述检测件用于检测所述随动件是否位于所述第二支撑位。10.根据权利要求1至5任一项所述的机器人,其特征在于,所述机器人本体上设有检测装置,所述承载台内部设置有容纳腔,所述检测装置安装在所述容纳腔中。
技术总结
本申请涉及机器人技术领域,提供了一种机器人,包括:机器人本体;活动件,所述活动件可活动设置在所述机器人本体上,所述活动件上设置有随动件,所述随动件适于跟随所述活动件在远离所述机器人本体的第一支撑位和靠近所述机器人本体的第二支撑位之间移动;承载台,所述承载台凸设于所述机器人本体上,所述承载台用于在所述随动件位于所述第二支撑位时对所述随动件进行承载。本申请实施例提供的机器人能够使用户非常方便地对机器人的功能部件进行操作,从而提高了用户对机器人的使用体验。从而提高了用户对机器人的使用体验。从而提高了用户对机器人的使用体验。
技术研发人员:胡学洪 付朝忠 吴晓龙
受保护的技术使用者:深圳市普渡科技有限公司
技术研发日:2021.11.17
技术公布日:2022/6/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。