1.本技术涉及机器人技术领域,具体涉及一种机器人。
背景技术:
2.随着科技的快速发展,机器人越来越多地应用在人们的生活当中,例如,扫地机器人、探测机器人、搬运机器人等。为了实现人机交互,机器人的机身上会通常会设置一些功能部件,如显示屏、控制台等,但在有些情况下,设于机身上的功能部件可能不便于用户进行操作,例如,如果机器人高度较低,用户操作显示屏或者控制台等功能部件会不方便,从而影响了操作者对机器人的使用体验。
技术实现要素:
3.本技术实施例提供了一种机器人,能够使用户非常方便地对机器人的功能部件进行操作,从而提高了用户对机器人的使用体验。具体方案如下:
4.本技术实施例提供了一种机器人,包括:
5.机器人本体;
6.活动件,所述活动件可活动设置在所述机器人本体上,所述活动件上设置有随动件,所述随动件适于跟随所述活动件在远离所述机器人本体的第一支撑位和靠近所述机器人本体的第二支撑位之间移动;
7.承载台,所述承载台凸设于所述机器人本体上,所述承载台用于在所述随动件位于所述第二支撑位时对所述随动件进行承载。
8.可选地,所述活动件为扶手,和/或,所述随动件为显示屏。
9.可选地,所述活动件转动或者滑动设置在所述机器人本体的顶部。
10.可选地,所述机器人本体包括壳体,所述承载台凸出设于所述壳体的外侧壁上。
11.可选地,所述承载台包括用于支撑所述随动件的承载面,沿所述机器人本体顶部到底部的方向,所述承载面向外侧倾斜延伸。
12.可选地,所述活动件整体呈“u”形,所述活动件的开口端铰接在所述机器人本体上,所述随动件设于所述活动件的闭口端的外侧。
13.可选地,在所述随动件位于所述第二支撑位时,所述活动件位于所述机器人本体的顶部的上侧,且所述活动件与所述机器人本体的顶部之间存在间隙。
14.可选地,所述机器人本体的顶部设有收容槽,所述收容槽用于在所述随动件位于所述第二支撑位时对所述活动件进行收容。
15.可选地,所述承载台上设有检测件,所述检测件用于检测所述随动件是否位于所述第二支撑位。
16.可选地,所述机器人本体上设有检测装置,所述承载台内部设置有容纳腔,所述检测装置安装在所述容纳腔中。
17.可选地,所述随动件包括用于承载于所述承载面上的支撑面,所述支撑面与所述
承载面均为平面。
18.本技术实施例提供的机器人,由于活动件可活动设置在机器人本体上,活动件上设置有随动件,随动件适于跟随活动件在远离机器人本体的第一支撑位和靠近机器人本体的第二支撑位之间移动,这样,当用户需要操作随动件时,可以将随动件移动到远离机器人本体的第一支撑位,当用户操作完成后,可以将随动件移动到第二支撑位,以更便于机器人行走。可见,本技术提供的机器人更便于用户对随动件进行操作,提高了用户的使用体验。
19.另外,由于机器人本体上凸出设有承载台,当随动件位于靠近机器人本体的第二支撑位时,随动件能够支撑在承载台上,通过承载台能够使得随动件更平稳、可靠地支撑在机器人本体上,使得机器人在移动作业的过程中,随动件不容易发生晃动,进一步提高了用户的使用体验。
附图说明
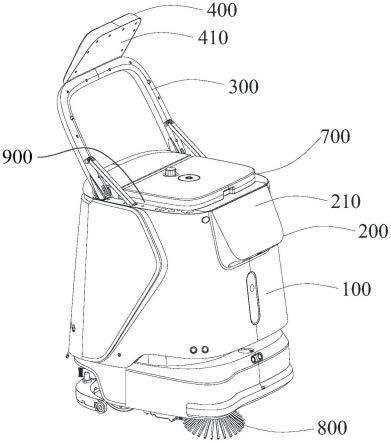
20.图1是本技术实施例提供的机器人当随动件位于第二支撑位时的整体结构示意图;
21.图2是图1所示的机器人当随动件位于第一支撑位时的整体结构示意图;
22.图3是图1所示的机器人在a-a视角的剖视图;
23.图4是图3所示的机器人在b部分的局部放大图;
24.图中标号分别为:
25.100、机器人本体;120、壳体;200、承载台;210、承载面;300、活动件;400、随动件;410、支撑面;500、检测装置;600、启动开关;700、安装台;800、刷毛;900、收容槽。
具体实施方式
26.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述。其中,在本技术实施例的描述中,除非另有说明,“/”表示或的意思,例如,a/b可以表示a或b;本文中的“和/或”仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,在本技术实施例的描述中,“多个”是指两个或多于两个。
27.以下,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“第三”的特征可以明示或者隐含地包括一个或者更多个该特征。
28.本技术提供了一种机器人,能够使用户非常方便地对机器人的功能部件进行操作,从而提高了用户对机器人的使用体验。
29.本技术实施例提供的机器人可以是扫地机器人、清洁机器人、探测机器人、配送机器人、送餐机器人等,但不限于此。
30.如图1至图4所示,本技术实施例提供的移动机器人包括机器人本体100、活动件300和承载台200,活动件300可活动设置在机器人本体100上,活动件300上设置有随动件400,随动件400适于跟随活动件300在远离机器人本体100的第一支撑位和靠近机器人本体100的第二支撑位之间移动,承载台200凸设于机器人本体100上,承载台200用于在随动件400位于第二支撑位时对随动件400进行承载。
31.上述活动件300可以是杆状结构、板状结构、块状结构、框架结构等,但不限于此。在一个具体实施例中,活动件300可以是扶手,这样,活动件300既可以支撑并带动随动件400活动,又可以使用户进行手扶等操作,方便了用户的使用和操作。
32.活动件300可以转动设置(例如铰接)在机器人本体100上,也可以滑动设置在机器人本体100上,或者活动件300通过其他的可活动的方式设置在机器人本体100上。为了便于用户移动活动件300,在本实施例中,活动件可以铰接在机器人本体100上。
33.本技术实施例中,活动件300可以设置在机器人本体100的顶部,也可以设置在机器人本体100的中部或者其他位置,本技术不限定活动件300的具体设置位置。
34.当机器人高度较低时,活动件300可以设置在机器人的顶部,以便于用户将随动件400移动到高于机器人本体100顶部的第一支撑位,以便于用户操作或查看随动件400。
35.上述随动件400可以是显示屏、控制台、开关、对讲机、摄像头等功能元件,但不限于此。随动件400可以设置在活动件300的中间位置、侧边位置等,本技术不限定随动件400在活动件300上的具体安装位置。
36.如图1所示,当随动件400位于靠近机器人本体100的第二支撑位时,随动件400与机器人本体100之间的距离较近,机器人整体的结构较紧凑;如图2所示,当随动件400位于远离机器人本体100的第一支撑位时,随动件400与机器人本体100之间的距离较远,随动件400位于便于用户操作的位置。
37.上述承载台200可以是块状结构、柱状结构、板状结构、壳体结构等,也可以是多种结构所组合形成的结构。承载台200能够承载随动件400即可,本技术不限定承载台200的具体结构。
38.承载台200可以通过螺纹连接、焊接、卡接、粘接等连接方式固定在机器人本体100上,也可以通过其他连接方式设置在机器人本体100上。
39.本技术实施例中,机器人本体100可以包括壳体120,承载台200可以设置在壳体120上,具体的,承载台200可以设置在壳体120的外侧壁上。
40.当承载台200设置在壳体120的外侧壁上时,可以使机器人本体100顶面的结构更简洁,更便于用户操作机器人,也可以使机器人的整体结构更合理、紧凑。另外,为了更好地实现机器人的小型化,壳体120顶壁的面积相对于壳体120侧壁的面积通常小很多,所以,承载台200设置在壳体120的外侧壁上也更利于机器人的小型化设计。
41.当承载台200设置在壳体120的外侧壁上时,承载台200可以位于壳体120靠近顶部的位置,也可以位于壳体120的中部或者靠近底部的位置。
42.当活动件300设置在机器人本体100的顶部时,承载台200也可以设置在壳体120的外侧壁上靠近顶部的位置,以便于活动件300上的随动件400支撑在承载台200上。
43.在一种实施方式中,为了使机器人的安装工艺更简单,使机器人的结构更紧凑、可靠,承载台200可以与壳体120通过一体成型工艺形成一体结构。具体的,一体成型工艺可以是注塑成型、压塑成型、锻造、铸造等,但不限于此。
44.可选地,如图2所示,机器人本体100的顶部可以凸出设有安装台700,活动件300可以连接在该安装台700上。或者,机器人本体100的顶部可以设置安装槽,活动件300连接在该安装槽内。
45.活动件300也可以通过其他方式安装在机器人本体100上,本技术不限定活动件
300的具体安装方式。
46.可以理解的是,本技术实施例中,随动件400具有用于支撑在承载台200上的支撑面410,承载台200具有用于支撑该支撑面410的承载面210,支撑面410支撑在承载面210上,实现承载台200对随动件400的承载。
47.承载面210可以为平面、曲面、波浪形面等,支撑面410可以与承载面210的形状相匹配,例如,支撑面410与承载面210均为平面,或者支撑面410与承载面210分别为相适配的曲面,以使得支撑面410支撑在承载面210上后,能够与承载面210较好地贴合,从而使得随动件400更平稳、可靠地支撑在承载台200上。
48.可选地,支撑面410与承载面210可以均为平面。这样,既可以使得机器人的结构更简单、生产加工也更简单,还可以使得支撑面410更平稳地支撑在承载面210上,从而使得活动件300更可靠地支撑在机器人本体100上。
49.本技术实施例提供的机器人,由于活动件300可活动设置在机器人本体100上,活动件300上设置有随动件400,随动件400适于跟随活动件300在远离机器人本体100的第一支撑位和靠近机器人本体100的第二支撑位之间移动,这样,当用户需要操作随动件400时,可以将随动件400移动到远离机器人本体100的第一支撑位,当用户操作完成后,可以将随动件400移动到第二支撑位,以更便于机器人行走。可见,本技术提供的机器人更便于用户对随动件400进行操作,提高了用户的使用体验。
50.另外,由于机器人本体100上凸出设有承载台200,当随动件400位于靠近机器人本体100的第二支撑位时,随动件400能够支撑在承载台200上,使得承载台200与活动件300共同支撑随动件400,能够使得随动件400更平稳、可靠地支撑在机器人本体100上,使得机器人在移动作业的过程中,随动件400不容易发生晃动,进一步提高了用户的使用体验。
51.在一种实施方式中,如图3至图4所示,当承载台200设于壳体120的外侧壁上时,沿着机器人本体100顶部到底部的方向,承载台200的承载面210可以向外侧倾斜延伸。
52.承载台200的承载面210即承载台200朝向顶侧的外表面。
53.由于用户操作机器人时人脸通常位于机器人的斜上方,当承载面210向外侧倾斜延伸时,可以使得随动件400(例如显示屏、控制台等)在位于第一支撑位时能够斜向上朝向人脸,更便于用户操作,提高了设计的人性化。另外,还可以减小承载台200凸出于壳体120外侧壁的高度,同时,也可以使得承载面210的面积较大,以更平稳、可靠地支撑随动件400,从而更平稳可靠地支撑活动件300。
54.可选地,当随动件400位于第二支撑位时,随动件400的支撑面410与承载面210能够较好地贴合支撑,以将随动件400平稳承载。
55.在一种实施方式中,如图1、图2所示,活动件300可以整体呈“u”形,活动件300的开口端铰接在机器人本体100上,随动件400设于活动件300的闭口端的外侧。
56.具体的,活动件300的开口端的两侧可以分别铰接在上述安装台700的两个相对的外侧壁上。
57.随动件400设于活动件300的闭口端外侧,即随动件400向活动件300的外侧延伸,活动件300的外侧可以理解为活动件300所围成的“u”形结构的外周。
58.本实施方式中,将随动件400设在活动件300的闭口端,当随动件400位于第二支撑位时,闭口端的随动件400可以通过承载台200支撑在机器人本体100上,由于活动件300的
开口端与机器人本体100铰接,所以活动件300的开口端也可以支撑在机器人本体100上,所以活动件300、随动件400均可以可靠、稳定地支撑在机器人本体100上。
59.在一种实施方式中,如图1、图3、图4所示,在随动件400位于第二支撑位时,活动件300可以位于机器人本体100的顶部,活动件300与机器人本体100的顶部之间存在间隙。
60.本实施方式中,活动件300可以安装在上述安装台700上。
61.本实施方式也可以理解为,当随动件400位于第二支撑位时,活动件300的一端连接在机器人本体100上,活动件300的另一端通过随动件400支撑在承载台200上,机器人本体100的与活动件300连接的部位、承载台200共同将活动件300支撑起来,使得活动件300与机器人本体100的顶部之间存在间隙。
62.在随动件400位于第二支撑位时,活动件300与机器人本体100的顶部之间存在的间隙范围可以为0.2毫米~1毫米,该间隙也可以为其他较小的值。
63.可以理解的是,在随动件400位于第二支撑位时,活动件300与机器人本体100的顶部之间存在的间隙应设置的较小,以使得机器人的结构更紧凑。
64.本实施方式当在随动件400位于第二支撑位时,由于活动件300与机器人本体100的顶部之间存在间隙,可以使得在机器人作业过程中,活动件300不容易与机器人本体100发生碰撞,从而可以减小机器人运行时的噪音,提高了用户体验。
65.在一种实施方式中,如图1、图2所示,随动件400可以为安装在活动件300上的显示屏,在随动件400位于第二支撑位时,显示屏的背面支撑在承载台200上。
66.上述显示屏可以为触摸显示屏,上述显示屏可以用于显示虚拟操作按键,以使得用户通过显示屏能够进行相关操作,显示屏还可以用于显示设备状态,例如,电池状态、故障状态等。通过设置显示屏,更便于用户操作。
67.本实施方式中,当显示屏位于第一支撑位时,显示屏的显示面能够朝向机器人的外侧,以便于用户观看、操作显示屏。
68.显示屏的背面即显示屏的与显示面背对的表面。
69.在一种实施方式中,如图1、图2所示,机器人本体100的顶部可以设有收容槽900,收容槽900用于在随动件400位于所述第二支撑位时对活动件300进行收容。
70.收容槽900的形状可以与活动件300的形状相匹配,以便于对活动件300进行收容,并且使机器人的结构更合理。例如,活动件300整体呈“u”形结构,收容槽900也可以为整体呈“u”形的槽。
71.收容槽900能够用于放置活动件300即可,具体形状不限定。
72.本实施方式将活动件300放置在收容槽900内,可以使得机器人的整体结构更紧凑、合理,也可以使得活动件300被更平稳放置,使得机器人移动时噪音更小。
73.在一种实施方式中,承载台200上可以设有检测件(图中未示出),检测件用于检测随动件400是否位于所述第二支撑位。
74.检测件可以是微动开关、接触传感器、光电传感器等,但不限于此。检测件可以设置在承载台200的承载面210,也可以设置承载台200的其他位置。
75.本实施方式中,检测件与控制器连接,检测件可以将检测结果发送给机器人的控制器,控制器根据检测结构控制机器人是否移动运行。这样,可以在确保随动件400位于第二支撑位时机器人才能够移动,避免出现随动件400未闭合就开始移动的现象,影响运行的
平稳性。还可以使得随动件400位于第一支撑位时控制机器人停止运行,保证用户操作的安全性。
76.在一种实施方式中,如图4所示,机器人本体100上还可以设有检测装置500,承载台200内部设有容纳腔,检测装置500安装在该容纳腔内。
77.上述检测装置500可以是雷达探测器、深度相机、红外探测器、光电传感器等,也可以是其他用于检测路况、障碍物等的检测装置500。
78.具体的,承载台200上可以设有通孔,检测装置500能够穿过该通孔与外界环境进行信号传输。
79.承载台200上还可以设置启动开关600等功能件。
80.在一种实施方式中,如图1所示,机器人还可以包括设置在机器人本体100底部的刷毛800,刷毛800用户在机器人移动的过程中进行清扫。
81.可选地,机器人本体100底部还设有滚轮、履带等移动机构,用于带动机器人移动。机器人本体100还可以包括设于壳体120内的电机、减速器、电池等用于驱动移动机构运行的部件。
82.应理解,上述只是为了帮助本领域技术人员更好地理解本技术实施例,而非要限制本技术实施例的范围。本领域技术人员根据所给出的上述示例,显然可以进行各种等价的修改或变化,或者上述任意两种或者任意多种实施例的组合。这样的修改、变化或者组合后的方案也落入本技术实施例的范围内。
83.还应理解,上文对本技术实施例的描述着重于强调各个实施例之间的不同之处,未提到的相同或相似之处可以互相参考,为了简洁,这里不再赘述。
84.还应理解,本技术实施例中的方式、情况、类别以及实施例的划分仅是为了描述的方便,不应构成特别的限定,各种方式、类别、情况以及实施例中的特征在不矛盾的情况下可以相结合。
85.还应理解,在本技术的各个实施例中,如果没有特殊说明以及逻辑冲突,不同的实施例之间的术语和/或描述具有一致性、且可以相互引用,不同的实施例中的技术特征根据其内在的逻辑关系可以组合形成新的实施例。
86.以上该,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以该权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
