1.本发明属于水利水电、工民建领域,具体涉及一种高边坡及大型洞室支护智能施工方法及施工装置。
背景技术:
2.在工程高边坡或大型洞室支护施工时,现有技术往往采用搭设高排架的方式,再在高排架上进行锚杆钻孔及安装、预应力锚索钻孔及安装、灌浆、排水孔钻孔及安装、挂钢丝网喷射混凝土等多个工序施工作业。一方面高排架搭设周期长,人工投入大,费时费力;另一方面安全隐患较为突出;第三喷射混凝土时作业者劳动环境差,有害身体健康,还要从上边拆排架边喷混凝土;所采用的工程设备也时传统的手风钻和锚索钻孔机,由人工进行上述多工序的施工,工效低,工期长。
技术实现要素:
3.本发明就是针对现有技术的不足,提供了一种效率高、工期短、作业环境优良的高边坡及大型洞室支护智能施工方法及施工装置。
4.为了实现上述目的,本发明所设计的高边坡及大型洞室支护智能施工方法,其特征在于,包括以下步骤:
5.步骤1:定位作业点,通过三维扫描快速成像技术对作业面进行快速成像,生成作业面三维数字地形模型图;
6.步骤2:将所建立的作业面三维数字地形模型图和设计施工支护图分别录入控制电脑中;
7.步骤3:规划施工步骤,首先设计自动施工装置;然后,划分作业面,对每个作业面,先确定该作业面的起始坐标点,再采用步骤1和步骤2进行作业点的定位;
8.其中,所述的自动施工装置包括锚索锚杆钻孔机械手臂、锚索锚杆安装机械手臂、注浆机械手臂;所述锚索锚杆钻孔机械手臂用于在岩壁上钻孔,所述锚索锚杆安装机械手臂用于抓取锚杆锚索并输送至钻孔内,所述注浆机械手臂用于对钻孔内喷射水泥浆,实现锚杆锚索的安装。
9.步骤4:进行现场施工
10.利用录有支护点坐标的自动施工装置对高边坡或者大型洞室支护进行施工。
11.进一步地,所述步骤1中的三维扫描快速成像技术的硬件也集成在自动施工装置上。
12.进一步地,两作业面之间的距离为5~10m。
13.本发明还设计了一种用于实现高边坡及大型洞室支护智能施工方法的装置,包括平台模块及平台模块上设置的三维激光扫描仪、主控电脑和自动施工装置;
14.所述三维激光扫描仪和主控电脑连接,用于根据高边坡及大型洞室支护智能施工方法获取作业点坐标;
15.所述自动施工装置与主控电脑连接,用于根据主控电脑获取的作业点坐标对高边坡或者大型洞室支护进行施工。
16.所述自动施工装置包括设置在平台模块上的钻孔模块、喷射混凝土或注浆模块、工业机械安装手臂模块,平台模块上设置有行走机构,平台模块可以整体为工程车;钻孔模块、工业机械安装手臂模块及喷射混凝土或注浆模块均与主控电脑连接,主控电脑控制钻孔模块、喷射混凝土模块和工业机械安装手臂实现对锚杆的固定安装。
17.进一步地,所述钻孔模块用于在岩壁上钻孔,主要包括可自动伸缩的液压第一机械臂,第一机械臂底端通过转动机构连接在平台模块上,且与平台模块之间设有液压控制伸缩的第二支撑杆;转动机构能实现360
°
旋转;第一机械臂顶端铰接有钻杆支架,靠近该铰接点的钻杆支架和第一机械臂之间连接有由液压控制伸缩的第一支撑杆,钻杆支架上设有钻机和配套的钻杆,钻杆支架上还设有钻杆导向结构和螺杆滑轨,钻杆导向结构用于限制钻杆的方向,使得钻杆沿着该导向结构运动,不会偏移,保证了作用过程的精度。螺杆滑轨与钻机配合使用,钻机在运行过程中,沿着螺杆滑轨移动。本发明中,钻孔模块工作时,第一机械臂和第二支撑杆配合使用,负责将钻机支架升降至作业面高度,即对钻机支架进行粗调;第一支撑杆及360度旋转的转动机构负责将钻机支架移动至作业面方位,即对钻机支架进行微调;钻机支架承担钻机、驱动装置和摄像头的安装;钻机支架设置的滑轨保证转机在工作过程的平稳运行。
18.进一步地,本设计中使用的工业机械安装手臂模块具体包括液压驱动的可伸缩的第二机械臂,所述第二机械手臂底端通过第二转动平台连接在平台模块上,且与平台模块之间设有液压控制伸缩的第三支撑杆,第二机械手臂顶端铰接有抓手安装臂,靠近该铰接点的抓手安装臂和第二机械臂之间连接有由液压控制伸缩的第四支撑杆;所述抓手安装臂上通过转动装置连接有用于夹紧锚杆或者锚索的抓手。转动装置由主控电脑控制转动角。
19.进一步地,所述喷射混凝土模块包括通过底端转动平台连接在平台模块上的第三机械臂,第三机械臂顶端铰接有可伸缩的第四机械臂,靠近该铰接处的第三机械臂和第四机械臂之间设有由液压控制伸缩的第五支撑杆,所述第四机械臂上设有带喷头的混凝土喷射机,混凝土喷射机用于对混凝土输送软管运送来的混凝土进行喷射。
20.优选地,为了方便人工作业的需求,该平台模块上还设置有人工辅助操作平台,该辅助操作平台包括底端通过转动平台连接在平台模块上的可伸缩的第五机械臂,所述第五机械臂与转动平台之间设置有由液压控制伸缩的第六支撑杆,第六机械臂顶端铰接有连接臂,靠近该铰接点的连接壁和第六机械臂之间设有可伸缩的第七支撑杆,所述连接臂上设有带护栏的人工辅助操作框。
附图说明
21.图1是本发明的高边坡及大型洞室支护智能施工装置结构示意图。
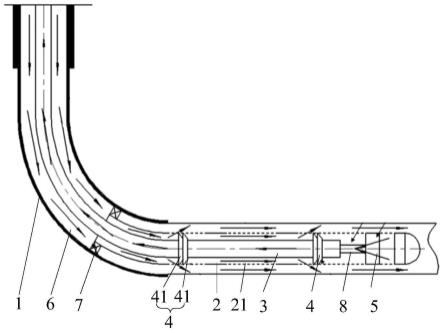
22.图2是本本发明的又一结构示意图。
23.图3是本发明的高边坡及大型洞室支护智能施工装置收起结构示意图。
24.图4为本发明的钻孔模块结构示意图。
25.图5为本发明的机械安装抓手模块结构示意图。
26.图6为本发明的喷射混凝土或注浆模块结构示意图。
27.图7为本发明的人工辅助操作平台结构示意图。
28.图8为本发明的三维扫描仪结构示意图。
29.图中:钻孔模块1:电动钻机1.1,钻杆1.2,螺杆滑轨1.3,导向结构1.4,第一摄像头1.5,第一支撑杆1.6,第一机械臂1.7,第二支撑杆1.8;
30.工业机械安装手臂模块2:机械安装抓手2.1,转动装置2.2,第二摄像头2.3,第三支撑杆2.4,第二机械臂2.5,第四支撑杆2.6,抓手安装臂2.7;
31.喷射混凝土或注浆模块3:喷头3.1,混凝土喷射机3.2,混凝土输送软管3.3,第三机械臂3.4,第三摄像头3.5,第五支撑杆3.6,第四机械臂3.7;
32.人工辅助操作平台4:人工辅助操作框4.1,连接壁4.2、转动装置4.3,第五机械臂4.4,第六支撑杆4.5,第七支撑杆4.6;
33.三维激光扫描仪5;泵送混凝土或注浆系统6;旋转底盘7;工程车8;空压机9;综合台车车头(含智能控制系统)10;照明11;操作固定装置12。
具体实施方式
34.下面结合附图和具体实施例对本发明作进一步的详细描述:
35.一种本发明所设计的高边坡及大型洞室支护智能施工方法,包括以下步骤:
36.步骤1:定位作业点,通过三维扫描快速成像技术对作业面进行快速成像,生成作业面三维数字地形模型图;
37.步骤2:将所建立的作业面三维数字地形模型图和设计施工支护图分别录入控制电脑中;
38.将施工支护地图与作业面三维数字地形模型图进行叠合匹配,自动生成支护点坐标;该过程采用坐标匹配技术,即将施工支护图坐标信息生成数据与三维扫描仪扫描自动生成的施工作业面地形三维数字模型图数据信息进行匹配,把拟支护作业的内容和坐标信息在施工作业面地形三维数字模型图上自动生成。只要两者数据格式统一即可,具体可将施工支护图坐标信息生成的是autocad数据格式,而三维扫描仪生成的多为obj、asc、stl及dxf等格式,将三维扫描仪生成多种格式的文件很容易转化成dwg或dwt格式,如此,即可在同一个界面下做到自动相互兼容录入了。
39.步骤3:规划施工步骤
40.设计自动施工装置;
41.划分作业面,对每个作业面,先确定该作业面的起始坐标点,再采用步骤1和步骤2进行作业点的定位;
42.其中,所述的自动施工装置包括锚索锚杆钻孔机械手臂、锚索锚杆安装机械手臂、注浆机械手臂;所述锚索锚杆钻孔机械手臂用于在岩壁上钻孔,所述锚索锚杆安装机械手臂用于抓取锚杆锚索并输送至钻孔内,所述注浆机械手臂用于对钻孔内喷射水泥浆,实现锚杆锚索的安装。
43.步骤4:进行现场施工
44.利用录有支护点坐标的自动施工装置对高边坡或者大型洞室支护进行施工。
45.优选地,所述步骤1中的三维扫描快速成像技术的硬件也集成在自动施工装置上。
46.优选地,两作业面之间的距离为5~10m。
47.本发明还设计了一种实现高边坡及大型洞室支护智能施工方法的装置,包括平台模块及平台模块上设置的三维激光扫描仪5、主控电脑和自动施工装置;
48.三维激光扫描仪5和主控电脑连接,用于根据高边坡及大型洞室支护智能施工方法获取作业点坐标;
49.自动施工装置与主控电脑连接,用于根据主控电脑获取的作业点坐标对高边坡或者大型洞室支护进行施工;
50.其中,所述自动施工装置包括设置在平台模块上的钻孔模块1、喷射混凝土或注浆模块3、工业机械手臂2,平台模块上设置有行走机构,平台模块可以整体为工程车8;钻孔模块1、工业机械手臂2和喷射混凝土或注浆模块3均与主控电脑连接,主控电脑中有相应的程序控制钻孔模块、喷射混凝土模块和工业机械手臂实现对锚杆的固定安装。
51.钻孔模块1用于在岩壁上钻孔,主要包括可自动伸缩的液压第一机械臂1.7,第一机械臂1.7底端通过转动机构连接在平台模块上,且与平台模块之间设有液压控制伸缩的第二支撑杆1.8;转动机构能实现360
°
旋转;第一机械臂1.7顶端铰接有钻杆支架,靠近该铰接点的钻杆支架和第一机械臂之间连接有由液压控制伸缩的第一支撑杆1.6,钻杆支架上设有钻机1.1和配套的钻杆1.2,钻杆支架上还设有钻杆导向结构1.4和螺旋滑轨1.3,钻杆导向结构1.4用于限制钻杆1.2的方向,使得钻杆1.2沿着该导向结构1.4运动,不会偏移,保证了作用过程的精度。螺旋滑轨1.3与钻机1.1配合使用,钻机1.1在运行过程中,沿着螺旋滑轨1.3移动。本发明中,钻孔模块工作时,第一机械臂1.7和第二支撑杆1.8配合使用,负责将钻机支架升降至作业面高度,即对钻机支架进行粗调;第一支撑1.6杆及360度旋转的转动机构负责将钻机支架移动至作业面方位,即对钻机支架进行微调;钻机支架承担钻机、驱动装置和摄像头的安装;钻机支架设置的滑轨保证转机在工作过程的平稳运行。
52.工业机械安装手臂模块2用于抓取锚杆锚索并输送至钻孔内。本设计中使用的工业机械手臂模块2具体包括液压驱动的可伸缩的第二机械臂2.5,第二机械手臂2.5底端通过第二转动平台连接在平台模块上,且与平台模块之间设有液压控制伸缩的第三支撑杆2.4,第二机械手臂2.5顶端铰接有抓手安装臂2.7,靠近该铰接点的抓手安装臂2.7和第二机械臂2.5之间连接有由液压控制伸缩的第四支撑杆2.6;抓手安装臂2.7上通过转动装置连接有用于夹紧锚杆或者锚索的抓手2.1。转动装置由主控电脑控制转动角。
53.喷射混凝土或注浆模块3包括通过底端转动平台连接在平台模块上的第三机械臂3.4,第三机械臂3.4顶端铰接有可伸缩的第四机械臂3.7,靠近该铰接处的第三机械臂3.4和第四机械臂3.7之间设有由液压控制伸缩的第五支撑杆3.6,所述第四机械臂3.7上设有带喷头3.1的混凝土喷射机3.2,混凝土喷射机3.2用于对混凝土输送软管3.3运送来的混凝土进行喷射。
54.优选地,为了方便人工作业的需求,该平台模块上还设置有人工辅助操作平台,该辅助操作平台包括底端通过转动平台连接在平台模块上的可伸缩的第五机械臂,第五机械臂与转动平台之间设置有由液压控制伸缩的第六支撑杆,第六机械臂顶端铰接有连接臂,靠近该铰接点的连接壁和第六机械臂之间设有可伸缩的第七支撑杆,所述连接臂上设有带护栏的人工辅助操作框。
55.钻孔模块、工业机械手臂模块、喷射混凝土或注浆模块和人工辅助操作平台其中控制该模块位姿的结构可以采用现有的机械臂实现,控制位姿的结构如钻孔模块中的转动
机构、第一机械臂、第二支撑杆、钻杆支架、第一支撑杆共同组成的结构,可以采用现有的机械臂实现,也可以根据每个操作过程全部姿态、关节数量、动作幅度及动作速度编写每个操作作业的专门的控制软件,软件编写好后再对每个操作过程进行真实模拟并对所有的控制参数进行精确率定。且钻孔模块、工业机械手臂模块和喷射混凝土模块上均设有与主控电脑连接的摄像头,可通过主控电脑显示屏上的精确坐标值的动态变化情况,结合人工操作控制手柄进行精确定位,直到精准到达拟施工的支护点为止。
56.进一步地,所述钻孔模块设置有2个;钻孔模块上设有摄像头,所述摄像头与控制模块连接。钻孔模块负责锚杆、锚索及排水孔钻孔作业。工业机械手臂设置在两钻孔模块之间,保证了锚杆锚索安装的便捷性。
57.钻孔模块采用两个是为了提高施工效率,可同时进行两个钻孔作业,也即采用工程界成熟的多臂钻方式。
58.进一步地,所述钻孔模块、喷射混凝土或注浆模块和工业机械手臂模块上均设置有与主控电脑连接的摄像头。以便于在各种施工作业过程中,操作人员可在驾驶室内对自动控制系统操作过程进行全程监控,发现问题可及时处理修正,以便于整个施工过程精确有效的进行。避免了需要人工到每个作业点进行现场施工和监控,可大大减少人力、降低劳动强度及改善作业人员的工作环境。
59.以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。