技术特征:
1.一种多线激光雷达的性能测试方法,其特征在于,包括:控制连接部件由第一状态转动至第二状态,所述连接部件用于固定激光雷达,其中,所述连接部件处于所述第一状态时,对应于目标的、所述激光雷达的发射线束为第一发射线束,所述连接部件处于所述第二状态时,对应于所述目标的、所述激光雷达的发射线束为第二发射线束,在所述连接部件由所述第一状态转动至所述第二状态期间,所述目标与所述连接部件的转动中心之间相对位置不变;根据第一角度确定所述第一发射线束和所述第二发射线束之间的角度,所述第一角度是所述连接部件由所述第一状态转动至所述第二状态而产生的角度变化值。2.根据权利要求1所述的方法,其特征在于,所述第一发射线束和所述第二发射线束为所述激光雷达在水平面上的两个发射线束,所述连接部件以所述连接部件的垂直轴上的一点为旋转中心转动;或者,所述第一发射线束和所述第二发射线束为所述激光雷达在垂直面上的两个发射线束,所述连接部件以所述连接部件的水平轴上的一点为旋转中心转动。3.根据权利要求1或2所述的方法,其特征在于,所述控制连接部件由第一状态转动至第二状态,包括:控制所述连接部件经过n次转动后,由所述第一状态转动至所述第二状态,其中,n为正整数。4.根据权利要求3所述的方法,其特征在于,所述n次转动中所述连接部件沿所述第一发射线束至所述第二发射线束方向每次转动第二角度,其中,所述第二角度为预设值,或者,所述第二角度与参考角分辨率相关,所述参考角分辨率为所述第一发射线束与所述第二发射线束之间的夹角的参考值。5.根据权利要求3所述的方法,其特征在于,所述控制所述连接部件经过n次转动,由所述第一状态转动至所述第二状态,包括:控制所述连接部件从所述第一状态沿所述第一发射线束至所述第二发射线束方向以第三角度为间隔转动;若所述连接部件在第l次转动后所述目标与所述激光雷达的第二发射线束相对应,在第l 1次转动中,控制所述连接部件沿所述第二发射线束至所述第一发射线束方向转动所述第三角度,其中,l为小于n的正整数;控制所述连接部件沿所述第一发射线束至所述第二发射线束方向以第四角度为间隔转动至所述目标与所述激光雷达的第二发射线束相对应时,所述连接部件所处的状态为所述第二状态,其中,所述连接部件以第四角度为间隔共转动n-(l 1)次,所述第四角度小于所述第三角度。6.根据权利要求3所述的方法,其特征在于,所述n次转动中的第n次转动的角度为参考角分辨率的p
n
倍,其中,所述参考角分辨率为所述第一发射线束与所述第二发射线束之间的夹角的参考值,n是小于或等于n的正整数,0<p<1;或者,所述n次转动中的前k次转动中的第k次转动的角度为所述参考角分辨率的p
k
倍,其中,k是小于n的正整数,k是小于或等于k的正整数,所述n次转动中的第k次转动之后所述连接部
件以第五角度为间隔转动,所述第五角度小于或等于所述参考角分辨率的p
k
倍。7.根据权利要求1至6中任一项所述的方法,其特征在于,所述第一发射线束和所述第二发射线束为所述激光雷达在水平面上的相邻两个发射线束,所述第一角度用于确定所述第一发射线束与所述第二发射线束之间的水平角分辨率;或者,所述第一发射线束和所述第二发射线束为所述激光雷达在垂直面上的相邻两个发射线束,所述第一角度用于确定所述第一发射线束与所述第二发射线束之间的垂直角分辨率。8.根据权利要求1至7中任一项所述的方法,其特征在于,所述方法还包括:控制所述连接部件转动,使所述激光雷达在水平面或垂直面上的第一个发射线束至最后一个发射线束之间的每个发射线束分别与所述目标相对应;根据所述连接部件转动所产生的角度变化值,确定所述激光雷达的每相邻两个发射线束之间的角度。9.根据权利要求8所述的方法,其特征在于,所述第一发射线束为所述激光雷达在水平面或垂直面上的第一个发射线束,所述方法还包括:控制所述连接部件沿所述第二发射线束至所述第一发射线束方向以第六角度为间隔转动,至所述连接部件处于第三状态,所述第三状态是相对于最近一次所述激光雷达的发射线束与所述目标相对应时所述连接部件所处的状态,所述连接部件所产生的角度变化值大于第七角度,其中,所述第六角度小于所述激光雷达的相邻两个发射线束的最小参考角分辨率,所述第七角度为所述激光雷达相邻两个发射线束间的最大参考角分辨率;控制所述连接部件由所述第三状态沿所述第一发射线束至所述第二发射线束方向以第三角度为间隔转动;若所述连接部件在第m次转动后所述激光雷达的发射线束与所述目标相对应,在第m 1次转动中,控制所述连接部件沿所述第二发射线束至所述第一发射线束方向转动所述第三角度,其中,m为正整数;控制所述连接部件沿所述第一发射线束至所述第二发射线束方向以第四角度为间隔转动至所述激光雷达的发射线束与所述目标相对应时,所述连接部件所处的状态为所述第一状态,其中,所述第四角度小于所述第三角度,其中,所述第一发射线束至所述第二发射线束方向为顺时针方向或逆时针方向。10.根据权利要求1至7中任一项所述的方法,其特征在于,所述方法还包括:控制所述连接部件转动使所述激光雷达在水平面上的第三发射线束至第一个发射线束之间的每个发射线束分别与所述目标相对应,和/或,在水平面上的第三发射线束至最后一个发射线束之间的每个发射线束分别与所述目标相对应,其中,所述第三发射线束是所述激光雷达在水平面上的第一个发射线束与最后一个发射线束之间的一个发射线束;根据所述连接部件转动所产生的角度变化值,确定所述激光雷达的每相邻两个发射线束之间的角分辨率;或者,控制所述连接部件转动使所述激光雷达在垂直面上的第四发射线束至第一个发射线束之间的每个发射线束分别与所述目标相对应,和/或,在垂直面上的所述第三发射线束至最后一个发射线束之间的每个发射线束分别与所述目标相对应,其中,所述第四发射线束
是所述激光雷达在垂直面上第一个发射线束与最后一个发射线束之间的一个发射线束;根据所述连接部件转动所产生的角度变化值,确定所述激光雷达的每相邻两个发射线束之间的角分辨率。11.根据权利要求1至6中任一项所述的方法,其特征在于,所述第一发射线束和所述第二发射线束分别为所述激光雷达在水平面上的第一个发射线束和最后一个发射线束,或者,在水平面上的最后一个发射线束和第一个发射线束,所述第一角度用于确定所述激光雷达的水平视场角,或者,所述第一发射线束和所述第二发射线束分别为所述激光雷达在垂直面上的第一个发射线束和最后一个发射线束,或者,在垂直面上的最后一个发射线束和第一个发射线束,所述第一角度用于确定所述激光雷达的垂直视场角。12.根据权利要求1至11中任一项所述的方法,其特征在于,所述根据第一角度确定所述第一发射线束和所述第二发射线束之间的角度,包括:根据第一角度θ、所述转动中心与所述目标在同一水平面上的投影的最小距离a和所述激光雷达中心到所述转动中心的距离b,确定所述第一发射线束与所述第二发射线束之间的角度13.根据权利要求12所述的方法,其特征在于,所述角度满足14.根据权利要求1至13中任一项所述的方法,其特征在于,所述目标为反光条,所述反光条的反射强度为第一值,所述激光雷达的一个发射线束对应的点云的反射强度为第二值时表示所述激光雷达的发射线束与所述目标相对应,所述第二值与所述第一值之间的差值小于或等于预设值。15.根据权利要求14所述的方法,其特征在于,所述反光条置于平面标靶上,所述平面标靶与所述连接部件的水平轴和垂直轴形成的平面平行,所述第一发射线束和所述第二发射线束为所述激光雷达在垂直面上的两个发射线束,所述反光条与所述连接部件的水平轴平行;或者,所述第一发射线束和所述第二发射线束为所述激光雷达在水平面上的两个发射线束,所述反光条与所述连接部件的垂直轴平行。16.根据权利要求15所述的方法,其特征在于,所述反光条的宽度w满足其中,d为所述激光雷达的中心到所述平面标靶的最小距离,α为所述激光雷达的参考最小角分辨率。17.一种多线激光雷达的性能测试装置,其特征在于,所述测试装置包括连接部件、控制部件和处理部件,所述连接部件,用于固定激光雷达;所述控制部件,用于控制所述连接部件由第一状态转动至第二状态,其中,所述连接部件处于所述第一状态时,对应于目标的、所述激光雷达的发射线束为第一发射线束,所述连接部件处于所述第二状态时,对应于所述目标的、所述激光雷达的发射线束为第二发射线
束,在所述连接部件由所述第一状态转动至所述第二状态期间,所述目标与所述连接部件的转动中心之间相对位置不变;所述处理部件,用于根据第一角度确定所述第一发射线束和所述第二发射线束之间的角度,所述第一角度是所述连接部件由所述第一状态转动至所述第二状态而产生的角度变化值。18.根据权利要求17所述的装置,其特征在于,所述第一发射线束和所述第二发射线束为所述激光雷达在水平面上的两个发射线束,所述连接部件以所述连接部件的垂直轴上的一点为旋转中心转动;或者,所述第一发射线束和所述第二发射线束为所述激光雷达在垂直面上的两个发射线束,所述连接部件以所述连接部件的水平轴上的一点为旋转中心转动。19.根据权利要求17或18所述的装置,其特征在于,所述控制部件具体用于,控制所述连接部件经过n次转动后,由所述第一状态转动至所述第二状态,其中,n为正整数。20.根据权利要求19所述的装置,其特征在于,所述控制部件还用于,获取第二角度,其中,所述第二角度为预设值,或者,所述第二角度与参考角分辨率相关,所述参考角分辨率为所述第一发射线束与所述第二发射线束之间的夹角的参考值;所述控制部件具体用于,控制所述连接部件在所述n次转动中每次沿所述第一发射线束至所述第二发射线束方向每次转动所述第二角度。21.根据权利要求20所述的装置,其特征在于,所述控制所述连接部件在所述n次转动中每次转动所述第二角度,包括:控制所述连接部件从所述第一状态沿所述第一发射线束至所述第二发射线束方向以第三角度为间隔转动;若所述连接部件在第l次转动后所述目标与所述激光雷达的第二发射线束相对应,在第l 1次转动中,控制所述连接部件沿所述第二发射线束至所述第一发射线束方向转动所述第三角度,其中,l为小于n的正整数;控制所述连接部件沿所述第一发射线束至所述第二发射线束方向以第四角度为间隔转动至所述目标与所述激光雷达的发射线束相对应时,所述连接部件所处的状态为第二状态,其中,所述连接部件以第四角度为间隔共转动n-(l 1)次,所述第四角度小于所述第三角度。22.根据权利要求19所述的装置,其特征在于,所述控制部件还用于,获取参考角分辨率值,所述参考角分辨率为所述第一发射线束与所述第二发射线束之间的夹角的参考值;所述n次转动中的第n次转动的角度为所述参考角分辨率的p
n
倍,n是小于或等于n的正整数,0<p<1;或者,所述n次转动中的前k次转动中的第k次转动的角度为所述参考角分辨率的p
k
倍,其中,k是小于n的正整数,k是小于或等于k的正整数,所述n次转动中的第k次转动之后所述控制单元控制所述连接部件以第五角度为间隔转动,所述第五角度小于或等于所述参考角分辨率
的p
k
倍。23.根据权利要求17至22中任一项所述的装置,其特征在于,所述第一发射线束和所述第二发射线束为所述激光雷达在水平面上的相邻两个发射线束,所述处理部件具体用于根据所述第一角度确定所述第一发射线束与所述第二发射线束之间的水平角分辨率;或者,所述第一发射线束和所述第二发射线束为所述激光雷达在垂直面上的相邻两个发射线束,所述处理部件具体用于根据所述第一角度确定所述第一发射线束与所述第二发射线束之间的垂直角分辨率。24.根据权利要求17至23中任一项所述的装置,其特征在于,所述控制单元还用于,控制所述连接部件转动,使所述激光雷达在水平面或垂直面上的第一个发射线束至最后一个发射线束之间的每个发射线束分别与所述目标相对应;所述处理部件还用于,根据所述连接部件转动所产生的角度变化值,确定所述激光雷达的每相邻两个发射线束之间的角度。25.根据权利要求24所述的装置,其特征在于,所述第一发射线束为所述激光雷达在水平面或垂直面上的第一个发射线束,所述控制单元还用于,控制所述连接部件沿所述第二发射线束至所述第一发射线束方向以第六角度为间隔转动,至所述连接部件处于第三状态,所述第三状态相对于最近一次所述激光雷达的发射线束与所述目标相对应时所述连接部件所处的状态,所述连接部件所产生的角度变化值大于第七角度,其中,所述第六角度小于所述激光雷达相邻两个发射线束的最小参考角分辨率,所述第七角度为所述激光雷达相邻两个发射线束间的最大参考角分辨率;控制所述连接部件由所述第三状态沿所述第一发射线束至所述第二发射线束方向以第三角度为间隔转动;若所述连接部件在第m次转动后所述激光雷达的发射线束与所述目标相对应,在第m 1次转动中,控制所述连接部件沿所述第二发射线束至所述第一发射线束方向转动所述第三角度,其中,m为正整数;控制所述连接部件沿所述第一发射线束至所述第二发射线束方向以第四角度为间隔转动至所述激光雷达的发射线束与所述目标相对应时,所述连接部件所处的状态为所述第一状态,其中,所述第四角度小于所述第三角度,其中,所述第一发射线束至所述第二发射线束方向为顺时针方向或逆时针方向。26.根据权利要求17至23中任一项所述的装置,其特征在于,所述控制单元还用于,控制所述连接部件转动使所述激光雷达在水平面上的第三发射线束至第一个发射线束之间的每个发射线束与所述目标相对应,和/或,在水平面上的第三发射线束至最后一个发射线束之间的每个发射线束分别与所述目标相对应,其中,所述第三发射线束是所述激光雷达在水平面上第一个发射线束与最后一个发射线束之间的一个发射线束;所述处理单元还用于,根据所述连接部件转动所产生的角度变化值,确定所述激光雷达的每相邻两个发射线束之间的角分辨率;或者,所述控制单元还用于,控制所述连接部件转动使所述激光雷达在垂直面上的第四发射线束至第一个发射线束之间的每个发射线束分别与所述目标相对应,和/或,在垂直面上的
第三发射线束至最后一个发射线束之间的每个发射线束分别与所述目标相对应,其中,所述第四发射线束是所述激光雷达在垂直面上第一个发射线束与最后一个发射线束之间的一个发射线束;所述处理单元还用于,根据所述连接部件转动所产生的角度变化值,确定所述激光雷达的每相邻两个发射线束之间的角分辨率。27.根据权利要求17至22中任一项所述的装置,其特征在于,所述第一发射线束和所述第二发射线束分别为所述激光雷达在水平面上的第一个发射线束和最后一个发射线束,或者,在水平面上的最后一个发射线束和第一个发射线束,所述第一角度用于确定所述激光雷达的水平视场角,或者,所述第一发射线束和所述第二发射线束分别为所述激光雷达在垂直面上的第一个发射线束和最后一个发射线束,或者,在垂直面上的最后一个发射线束和第一个发射线束,所述第一角度用于确定所述激光雷达的垂直视场角。28.根据权利要求17至27中任一项所述的装置,其特征在于,所述处理单元具体用于,根据第一角度θ、所述转动中心与所述目标在同一水平面上的投影的最小距离a和所述激光雷达中心到所述转动中心的距离b,确定所述第一发射线束与所述第二发射线束之间的角度29.根据权利要求28所述的装置,其特征在于,所述角度满足30.根据权利要求17至29中任一项所述的装置,其特征在于,所述目标为反光条,所述反光条的反射强度为第一值,所述激光雷达的一个发射线束对应的点云的反射强度为第二值时表示所述激光雷达的一个发射线束与所述目标相对应,所述第二值与所述第一值之间的差值小于或等于预设值。31.根据权利要求30所述的装置,其特征在于,所述反光条置于平面标靶上,所述平面标靶与所述连接部件的水平轴和垂直轴形成的平面平行,所述第一发射线束和所述第二发射线束为所述激光雷达在垂直面上的两个发射线束,所述反光条与所述连接部件的水平轴平行;或者,所述第一发射线束和所述第二发射线束为所述激光雷达在水平面上的两个发射线束,所述反光条与所述连接部件的垂直轴平行。32.根据权利要求31所述的装置,其特征在于,所述反光条的宽度w满足其中,d为所述激光雷达的中心到所述平面标靶的最小距离,α为所述激光雷达的参考最小角分辨率。33.一种控制装置,其特征在于,包括处理器和通信接口;所述通信接口用于获取待处理的数据,所述处理器用于对所述待处理的数据得到处理后的数据,所述通信接口还用于输出所述处理后的数据,以使得所述控制装置执行权利要求1至16中任一项所述的方法。34.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程
序,当所述计算机程序被运行时,实现如权利要求1至16中任一项所述的方法。35.一种芯片,其特征在于,包括输入电路、输出电路和处理电路;所述处理电路用于通过所述输入电路接收信号,并通过所述输出电路发射信号,使得所述处理器执行权利要求1至16中任一项所述的方法。
技术总结
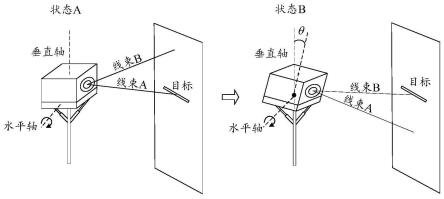
本申请提供了一种多线激光雷达性能测试方法和装置。该方法包括:控制连接部件由状态A转动至状态B,该连接部件用于固定激光雷达,该连接部件处于该状态A时,该激光雷达的发射线束A与目标对应,该连接部件处于该状态B时,该激光雷达的发射线束B与目标对应,在该连接部件由该状态A转动至该状态B期间,该目标与该连接部件的转动中心之间相对位置不变;根据第一角度确定该发射线束A和该发射线束B之间的角度。能够测试得到较准确的激光雷达的两发射线束之间的角度。该方案进一步可用于提升自动驾驶或高级驾驶辅助系统ADAS能力,可应用于车联网,例如车辆外联V2X、车间通信长期演进技术LTE-V、车辆-车辆V2V等。车辆V2V等。车辆V2V等。
技术研发人员:刘鹏 许玲玲 许建国 郑思喆
受保护的技术使用者:华为技术有限公司
技术研发日:2020.11.30
技术公布日:2022/6/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。