1.本发明涉及无轴承电机控制技术领域,主要涉及用于八齿一对极无轴承永磁薄片电机的低成本转子位移辨识方法。
背景技术:
2.无轴承薄片电机没有转轴,定转子分离,轴向长度小,容易实现五自由度悬浮,在心脏泵等超洁净医疗领域有独特的应用。心脏泵要求体积小、悬浮性能稳定,而传统的无轴承控制需要位移传感器采样位移信号实现闭环,常用的位移传感器如电涡流传感器体积大、价格高昂、受环境影响大,不满足心脏泵小体积、稳定悬浮性能的要求。因此,需要寻求一种无位移算法取代位移传感器。
3.基于霍尔传感器的无位移算法信噪比大、位移计算精确,动态性能优秀,能够很好的取代位移传感器,实现位移闭环。现有技术中的位移辨识方法均针对无轴承三相6齿电机,其相邻两个定子齿相隔60度。其中,专利“一种基于霍尔传感器的无轴承永磁薄片电机转子的无位移方法”(申请号:202111409320.9)使用12个霍尔进行位移辨识,专利“无轴承永磁薄片电机启动状态下的转子位移辨识方法”(申请号:202111623440.9)使用6个霍尔辨识位移且算法较为复杂。对于无轴承两相电机,针对八齿一对极电机结构,相邻两个定子齿相隔45度,12霍尔辨识法用于一对极电机时只能得到两个同方向的投影方程,即得到线性相关的方程而无法求解。在不考虑漏磁情况下,6霍尔辨识法是将3个互差120度的霍尔有效信号乘以互差120度的正余弦信号求和得到位移信息。而对于1对极8齿电机,无法构造互差120度的霍尔信号,只能构造4个互差90度的霍尔有效信号,依照上述方法,乘以互差90度的正余弦信号求和,得到结果为0,不包含位移信息,因而上述专利的方法无法直接用于八齿一对极电机。同时现有技术中采用的霍尔元件数量过多,成本负担也较重。
技术实现要素:
4.发明目的:针对上述背景技术中存在的问题,本发明提供了一种用于八齿一对极无轴承永磁薄片电机的低成本转子位移辨识方法,一方面解决了现有技术无法很好地应用于八齿一对极式电机的转子位移辨识问题,满足特殊的无轴承两相电机的应用场合,另一方面使用4个正交霍尔元件辨识位移,相较于现有技术进一步降低了成本。
5.技术方案:为实现上述目的,本发明采用的技术方案为:
6.一种用于八齿一对极无轴承永磁薄片电机的低成本转子位移辨识方法,所述无轴承永磁薄片电机采用八齿一对极的电机结构,包括8个l型定子;每个l型定子包括轴向的定子轭和径向定子齿,环绕在薄片状转子周围,径向定子齿与转子平齐,每个轴向定子轭分别绕有悬浮绕组和转矩绕组,所述转矩绕组为一对极,悬浮绕组为两对极,同时实现悬浮控制和旋转控制;所述l型定子底部通过铁心导磁环相连;所述薄片状转子没有硅钢片,外侧贴有一对极永磁体,所述永磁体磁场在空间上呈正弦分布;
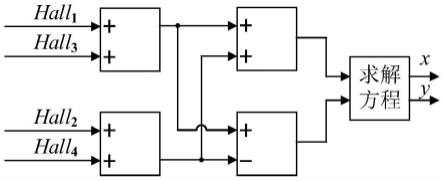
7.在径向定子槽口依次安装4个可编程霍尔传感器hall1—hall4,相邻霍尔传感器间的间隔角度均为90度;基于hall1—hall4的输出信号,将机械结构上相对的两个霍尔传感器输出信号分别求和,得到两个和数据;将和数据分别进行求和、作差运算;基于实验测算各霍尔信号的系数并代入,获得转子径向位移x和y。
8.进一步地,hall1的输出信号与转子在沿hall1方向及垂直于hall1方向的位移、转子角度、永磁磁链以及轴向扰动有关;由于薄片转子没有硅钢片,电枢漏磁磁阻较大,因而忽略漏磁,输出信号表达式如下:
9.hall1=0.5*k1*l*cos(θ
l-θ0)cos(ωt-θ0) 0.5*k2*l*sin(θ
l-θ0)sin(ωt-θ0) 0.5*k4*cos(ωt-θ0) δ
10.其中θ
l
代表偏心的角度,l代表偏心的长度,ωt代表转子角度,θ0代表hall1所在的机械角度;以hall1所在位置为基准,取θ0=0;δ是轴向抖动引起的输出变化,k1是沿hall1方向的位移系数,k2是垂直于hall1方向的位移系数,k4是不偏心时的永磁磁链系数;
11.由于hall1和hall3在机械方向上相对,用θ0 pi取代θ0,hall3输出信号表示如下:
12.hall3=0.5*k1*l*cos(θ
l-θ0)cos(ωt-θ0) 0.5*k2*l*sin(θ
l-θ0)sin(ωt-θ0)-0.5*k4*cos(ωt-θ0)-δ
13.同理可以得出hall2和hall4的输出信号。
14.进一步地,将机械结构上相对的两个霍尔传感器输出信号分别求和,得到两个和数据hall1 hall3和hall2 hall4;具体地,
15.将hall1和hall3输出信号相加,消除转子轴向抖动以及永磁磁链的影响,具体表示如下:
16.hall1 hall3=k1*l*cos(θ
l-θ0)cos(ωt-θ0) k2*l*sin(θ
l-θ0)sin(ωt-θ0)
17.同样地,将θ0 pi/2代入θ0可得hall2 hall4如下:
18.hall2 hall4=k1*l*sin(θ
l-θ0)sin(ωt-θ0) k2*l*cos(θ
l-θ0)cos(ωt-θ0)
19.将上述和数据分别求和、作差,结果如下:
20.l1=hall1 hall3 hall2 hall4=(k1 k2)lcos(θ
l-θ)
21.l2=hall1 hall
3-hall
2-hall4=(k
1-k2)lcos(θ
l
θ-2θ0)。
22.进一步地,通过实验测算,获取霍尔信号系数k1、k2;具体地,
23.计算k1时,首先将电机转子n极固定为正对hall1的位置,先贴边机械相对的hall3,即将机械相对的hall3对应转子贴到定子边上,然后再贴边hall1自身,用hall1的输出信号增量除以双边气隙得到k
11
,其中双边气隙指的是转子外径和定子内径的差值;对hall2—hall4依次采取上述操作,分别获得k
12
、k
13
和k
14
,最后求均值,即为需要的霍尔信号系数k1;
24.计算k2时,首先将电机转子n极固定为正对hall1的位置,手动将转子正对hall3方向向左贴到定子边上,再正对hall1方向向右贴到定子边上,用与hall1顺时针方向相差90
°
的hall4输出信号增量除以双边气隙,得到k
21
;对于hall2、hall3、hall4操作同理,获取k
22
、k
23
和k
24
;最后求平均值,即为需要的霍尔信号系数k2。
25.进一步地,将所述霍尔信号系数k1和k2代入求和、作差结果解算,可得径向位移x和y表示如下:
[0026][0027][0028]
有益效果:
[0029]
(1)、本发明提出基于极值解耦系数的四相霍尔解算法。专利202111409320.9的无位移方法只适用于转子两对极及以上的电机,应用至一对极式电机时只能得到一项可用约束,因而无法解算出位移。专利202111623440.9的无位移方法是将空间三相霍尔信号分别乘以三相正余弦并求和及处理得到比例相同的径向位移信息,该方法用于八齿一对极电机时,四个霍尔相对求和得到两个有效信号,类比成空间两相霍尔,两相正余弦的乘信号互为相反数,两相霍尔信号乘以互为相反数的乘信号求和后只能得到一项约束,无法解算位移。如果不考虑相对求和,本发明采用的方法可以看作空间四相霍尔,四相霍尔信号两两相同,四相正余弦的乘信号两两相反,导致求和为0,同样不包含位移信号。综上,现有技术中提出的位移辨识方法只适用于特定极槽配合的电机,针对本发明提出的八齿一对极电机的场景是不适用的。本发明提出针对八齿一对极电机的四相霍尔解算法,通过离线转子贴边,分离出其他系数,获取单个系数的变化极值,解除了霍尔信号中系数的约束,取消了原有方法乘以正余弦以得到相同系数位移信息的解调过程,进行求和、作差处理,联立得到位移信息。
[0030]
(2)本发明采用4个霍尔即可辨识位移,进一步降低了成本。现有技术中为了解除系数的约束,至少需要6个霍尔,相对求和得到三组有效约束解算两个位移信息,在八齿一对极电机中是冗余的。本发明采用4个霍尔得到两组有效约束,通过离线贴边测量系数法解除了对系数的约束,因而最大限度的使用了霍尔信号。
附图说明
[0031]
图1是本发明提供的转子位移辨识方法框架图;
[0032]
图2是本发明中无轴承永磁薄片电机霍尔传感器机械位置示意图;
[0033]
图3是本发明采用的八齿一对极无轴承永磁薄片电机轴向剖面图;
[0034]
图4是本发明提供的无轴承永磁薄片电机转子偏心示意图;
[0035]
图5是采用无位移算法的无轴承永磁薄片电机系统整体框图。
具体实施方式
[0036]
下面结合附图对本发明作更进一步的说明。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0037]
本实施例中采用的无轴承永磁薄片电机具体结构如图3所示,采用八齿一对极电机结构,包括8个l型定子2。每个l型定子2包括轴向的定子轭和径向定子齿,环绕在薄片状转子周围,径向定子齿与转子平齐,每个轴向定子轭分别绕有悬浮绕组4和转矩绕组5,转矩绕组为一对极,悬浮绕组为两对极,同时实现悬浮控制和旋转控制。l型定子底部通过铁心
导磁环3相连。薄片状转子1外侧贴有一对极永磁体,永磁体磁场在空间上呈正弦分布。
[0038]
这里对一对极进行补充解释:一对极指的是永磁体转子在空间上形成的磁场正弦个数,一个ns在空间上形成的磁场就是一个正弦,因为只有一个最大值和一个最小值。如果是nsns分布,那就是两对极。
[0039]
下面分别通过采用专利202111409320.9和专利202111623440.9中提出的无位移方法以及本发明提供的无位移辨识方法,进一步说明本发明的具体实施方式及有益效果。
[0040]
现有技术的两种方法都是针对6齿电机,即针对3个互差120度的霍尔有效信号。对于本发明针对的8齿1对极电机场景,由于机械上的限制无法得到3个互差120度的霍尔信号,但可以依照上述方法得到4个互差90度的霍尔有效信号。表达式如下:
[0041]
hall
1_eff
=k1*l*cos(θ
l-θ0)cos(ωt-θ0) k2*l*sin(θ
l-θ0)sin(ωt-θ0)
[0042]
hall
2_eff
=k1*l*cos(θ
l-θ
0-pi/2)cos(ωt-θ
0-pi/2) k2*l*sin(θ
l-θ
0-pi/2)sin(ωt-θ
0-pi/2)=k1*l*sin(θ
l-θ0)sin(ωt-θ0) k2*l*cos(θ
l-θ0)cos(ωt-θ0)
[0043]
hall
3_eff
=k1*l*cos(θ
l-θ
0-pi)cos(ωt-θ
0-pi) k2*l*sin(θ
l-θ
0-pi)sin(ωt-θ
0-pi)=k1*l*cos(θ
l-θ0)cos(ωt-θ0) k2*l*sin(θ
l-θ0)sin(ωt-θ0)
[0044]
hall
4_eff
=k1*l*cos(θ
l-θ
0-3pi/2)cos(ωt-θ
0-3pi/2) k2*l*sin(θ
l-θ
0-3pi/2)sin(ωt-θ
0-3pi/2)=k1*l*sin(θ
l-θ0)sin(ωt-θ0) k2*l*cos(θ
l-θ0)cos(ωt-θ0)
[0045]
首先,根据专利202111409320.9提供的无位移方法,将两组互差120度的霍尔信号求和,应用至本发明八齿一对极电机场景,将上述4个互差90度的霍尔信号求和,求和结果如下:
[0046]
s=hall
1_eff
hall
2_eff
hall
3_eff
hall
4_eff
=2*(k1 k2)*l*cos(θ
l-ωt)
[0047]
求和结果是偏心位置在ωt处的投影,与初始角度θ0无关,因此上述方法用于一对极电机场景时,只能得到两个同方向的投影方程,即得到线性相关的方程,无法求解转子位移。
[0048]
然后针对专利202111623440.9提供的无位移方法,将3个互差120度的霍尔有效信号乘以互差120度的正余弦信号求和得到位移信息。应用到本实施例中,将4个互差90度的霍尔有效信号乘以互差90度的正余弦信号求和如下:
[0049]
l1=hall
1_eff
*cos(ωt-θ0) hall
2_eff
*cos(ωt-θ
0-pi/2) hall
3_eff
*cos(ωt-θ
0-pi) hall
4_eff
*cos(ωt-θ
0-3pi/2)=hall
1_eff
*cos(ωt-θ0) hall
2_eff
*sin(ωt-θ0)-hall
3_eff
*cos(ωt-θ0)-hall
4_eff
*sin(ωt-θ0)=0
[0050]
l2=hall
1_eff
*sin(ωt-θ0) hall
2_eff
*sin(ωt-θ
0-pi/2) hall
3_eff
*sin(ωt-θ
0-pi) hall
4_eff
*sin(ωt-θ
0-3pi/2)=0
[0051]
得出结果为0,不包含位移信息因而无法解算位移。
[0052]
有上述结论可知,针对八齿一对极无轴承永磁薄片电机,上述现有技术中的无位移辨识方法均无法获得转子径向位移。针对这一特殊场景,本实施例提出了一种低成本的转子位移辨识方法,解算更加简单。
[0053]
本发明采用的无位移辨识方法如图1所示,在径向定子槽口依次安装4个可编程霍尔传感器hall1—hall4,相邻霍尔传感器间的间隔角度均为90度,如图2所示。基于hall1—hall4的输出信号,将机械结构上相对的两个霍尔传感器输出信号分别求和,得到两个和数据;将和数据分别进行求和、作差运算;基于实验测算各霍尔信号的系数并代入,获得转子
径向位移x和y。具体地,
[0054]
首先推导出hall1—hall4的输出信号。hall1的输出信号与转子在沿hall1方向及垂直于hall1方向的位移、转子角度、永磁磁链以及轴向扰动有关;由于薄片转子没有硅钢片,电枢漏磁磁阻较大,因而忽略漏磁,输出信号表达式如下:
[0055]
hall1=0.5*k1*l*cos(θ
l-θ0)cos(ωt-θ0) 0.5*k2*l*sin(θ
l-θ0)sin(ωt-θ0) 0.5*k4*cos(ωt-θ0) δ
[0056]
如图4所示,其中θ
l
代表偏心的角度,l代表偏心的长度,ωt代表转子角度,θ0代表hall1所在的机械角度;以hall1所在位置为基准,取θ0=0;δ是轴向抖动引起的输出变化,k1是沿hall1方向的位移系数,k2是垂直于hall1方向的位移系数,k4是不偏心时的永磁磁链系数;
[0057]
由于hall1和hall3在机械方向上相对,用θ0 pi取代θ0,hall3输出信号表示如下:
[0058]
hall3=0.5*k1*l*cos(θ
l-θ0)cos(ωt-θ0) 0.5*k2*l*sin(θ
l-θ0)sin(ωt-θ0)-0.5*k4*cos(ωt-θ0)-δ
[0059]
同理可以得出hall2和hall4的输出信号。
[0060]
然后将机械结构上相对的两个霍尔传感器输出信号分别求和,消除转子轴向抖动以及永磁磁链的影响,得到两个和数据hall1 hall3和hall2 hall4如下:
[0061]
hall1 hall3=k1*l*cos(θ
l-θ0)cos(ωt-θ0) k2*l*sin(θ
l-θ0)sin(ωt-θ0)
[0062]
同样地,将θ0 pi/2代入θ0可得hall2 hall4如下:
[0063]
hall2 hall4=k1*l*sin(θ
l-θ0)sin(ωt-θ0) k2*l*cos(θ
l-θ0)cos(ωt-θ0)
[0064]
将上述和数据分别求和、作差,结果如下:
[0065]
l1=hall1 hall3 hall2 hall4=(k1 k2)lcos(θ
l-θ)
[0066]
l2=hall1 hall
3-hall
2-hall4=(k
1-k2)lcos(θ
l
θ-2θ0)。
[0067]
接着通过实验测算,获取霍尔信号系数k1、k2;具体地,
[0068]
计算k1时,首先将电机转子n极固定为正对hall1的位置,先贴边机械相对的hall3,即将机械相对的hall3对应转子贴到定子边上,然后再贴边hall1自身,用hall1的输出信号增量除以双边气隙得到k
11
,其中双边气隙指的是转子外径和定子内径的差值;对hall2—hall4依次采取上述操作,分别获得k
12
、k
13
和k
14
,最后求均值,即为需要的霍尔信号系数k1;
[0069]
计算k2时,首先将电机转子n极固定为正对hall1的位置,手动将转子正对hall3方向向左贴到定子边上,再正对hall1方向向右贴到定子边上,用与hall1顺时针方向相差90
°
的hall4输出信号增量除以双边气隙,得到k
21
;将电机转子n极正对hall2的位置,先贴边hall4再贴边hall2,用hall1输出信号增量除以双边气隙得到k
22
;将电机转子n极正对hall3的位置,先贴边hall1再贴边hall3,用hall2输出信号增量除以双边气隙得到k
23
;将电机转子n极正对hall4的位置,先贴边hall2再贴边hall4,用hall3输出信号增量除以双边气隙得到k
24
;最后求平均值,即为需要的霍尔信号系数k2。
[0070]
将所述霍尔信号系数k1和k2代入求和、作差结果解算,联立可得径向位移x和y表示如下:
[0071]
[0072][0073]
图5为采用无位移算法的无轴承永磁薄片电机系统整体框图。其中,转矩控制部分为矢量控制,外环为速度环,用霍尔算出的转速作为反馈,内环为电流环。位移控制部分为外环位移环,用霍尔信号经过无位移算法得到的位移作为反馈,内环同样是电流环。
[0074]
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。