1.本发明涉及油气井井喷失控救援技术领域,具体涉及一种用于油气井井喷失控环境的信息侦察机器人。
背景技术:
2.井喷失控是油气勘探开发领域风险最大的事故,也被列为中国石油天然气集团公司八大安全风险之首。一旦发生井喷失控事故,将会在人员、环境、生态、资源等方面造成灾难性危害,给油气企业带来极其恶劣的社会影响和极其巨大的经济损失,必须迅速、有效加以控制。
3.井喷失控后,井筒内的流体包括钻井液、天然气、石油等从井内喷出,巨大的冲击力导致钻机及附属设备损坏,井场内情况不明。因此,控制井喷失控的首先工作即信息侦察,尽快掌握、了解井场情况是制定下步处置方案的关键,包括井场内设备损毁情况、有毒有害气体含量、井场内道路通畅情况等。
4.传统的信息侦察方式主要依靠人员携带防爆设备、气体检测仪进入井场内高风险区域,但井喷失控后在未着火的情况下仍存在随时闪爆的风险;在着火情况下,由于井场内热辐射高、潜在的燃爆点多,意味着在井场内进行近井口信息侦察的人员随时处于巨大风险之中。
5.因此,设计一种集图像采集、气体检测、声音搜索、红外成像等多种功能于一体的信息侦察机器人,对油气井井喷失控环境进行有效的信息侦察,显得尤为重要。
6.如国家知识产权局于2019年3月1日公开的申请号为“cn201811219675.x”,名称为“深水钻井井喷失控风险评价方法”,公开了一种深水钻井井喷失控风险评价方法,包括如下步骤:s1、选取深水钻井井喷失控的影响因素,并将相应影响因素分层次划分,以构建深水钻井井喷失控风险评价体系;s2、计算构建的深水钻井井喷失控风险评价体系中各个影响因素的权重;s3、制定每个影响因素的评价指标,并根据建立的影响因素的评价指标构建影响因素的风险评价标准;s4、根据每个影响因素的风险评价标准对每个影响因素进行评价,并根据评价结果以及每个影响因素的权重计算出深水钻井井喷失控风险的量化结果。
7.上述方案提出了一种深水钻井井喷失控风险评价方法,可见井喷失控一直是油气勘探的重要研究课题。
技术实现要素:
8.本发明的目的在于提供一种用于油气井井喷失控环境的信息侦察机器人,能在井喷失控高危环境下进行井场内图像采集传输、有毒有害气体检测及被困人员的搜救,为快速、安全处置井喷失控提供决策依据,解决了现有技术中依靠人员携带防爆设备、气体检测
仪进入井场内高风险区域进行勘察作业的安全风险问题。
9.本发明通过下述技术方案实现:一种用于油气井井喷失控环境的信息侦察机器人,包括行走装置、升降云台、图像采集模块、环境探测模块、远程遥控模块、自冷却保护模块、报警模块和控制器,所述升降云台可在竖直方向上调节高度、水平方向上旋转,所述升降云台设置在行走装置上,所述图像采集模块包括可见光摄像机、红外热成像仪,所述环境探测模块包括气体传感器和拾音器,气体传感器用于采集ch4、h2s、co2、co、o2气体含量信息,所述拾音器用于采集现场环境中的声音信息;所述自冷却保护模块包括有温度感应器和自冷却机构,温度感应器用于检测机器人自身温度,自冷却机构用于对机器人自身进行降温,所述远程遥控模块包括手持远程遥控终端,所述控制器分别与行走装置、升降云台、图像采集模块、环境探测模块、远程遥控模块、自冷却保护模块、报警模块控制连接。
10.进一步地,所述升降云台的最大上升高度不低于1.8m,水平方向360
°
连续旋转。
11.进一步地,所述可见光摄像机与红外热成像仪采用同一信息传输系统进行图像信息传送;所述图像采集模块采用图传技术将可见光摄像机采集的高清图像和红外热成像仪生成的温度云图进行同步回传。
12.进一步地,所述可见光摄像机与红外热成像仪的镜头水平角度调节范围为0
°‑
360
°
,垂直角度调节范围为-90
°‑
90
°
。
13.进一步地,所述图像采集模块还包括镜头清洗机构,用于对可见光摄像机与红外热成像仪的镜头进行清洗。
14.进一步地,所述行走装置采用履带式结构,所述行走装置的履带式底盘表层采用耐高温阻燃橡胶材料制成,行走装置内部为金属骨架。
15.进一步地,所述行走装置的最大行走速度1.5m/s,最大越障高度220mm,最大爬坡角度不低于38
°
,最大涉水深度350mm。
16.进一步地,所述行走装置中设有减震结构。所述减震结构优选为油压阻尼独立悬挂减震结构。
17.进一步地,所述行走装置上安装有超声波避障传感器。
18.进一步地,所述自冷却保护模块的自冷却机构包括喷淋装置。
19.本发明与现有技术相比,具有以下优点及有益效果:一、本发明中,本信息侦察机器人可远程遥控距离可超过1km,人员可在井场外完成遥控操作,实现高危作业区域无人化,实现了信息侦察环节无人化,极大提升了侦察人员的安全性。本信息侦察机器人的升降云台用于搭载气体传感器、可见光摄像机、红外热成像仪、拾音器,能对关键信息(如有毒有害气体含量、可见光、声音、温度场等)进行实时监测与传输,供抢险救援专家指挥决策,保证信息侦察前端信息与后端指挥的实施同步。
20.二、本发明中,所述升降云台的最大上升高度不低于1.8m,水平方向360
°
连续旋转,可满足信息侦察机器人对环境信息进行采集时,各个执行机构(包括气体传感器、可见光摄像机、红外热成像仪等)的工作高度、角度的需求。
21.三、本发明中,所述可见光摄像机与红外热成像仪采用同一信息传输系统进行图像信息传送,减少图像采集模块中图传子模块的使用频率,降低后期信息传输系统设计成本。本发明中,所述图像采集模块可采用目前先进的图传技术将可见光摄像机采集的高清图像和红外热成像仪生成的温度云图进行同步回传,信息传递迅速、有效。
22.四、本发明中,所述可见光摄像机与红外热成像仪的镜头水平角度调节范围为0
°‑
360
°
,垂直角度调节范围为-90
°‑
90
°
,可实现360
°
全景图像采集。
23.五、本发明中,所述图像采集模块还包括镜头清洗机构,用于对可见光摄像机与红外热成像仪的镜头进行清洗,保证图像采集清晰度,特别适用于有水雾的抢险环境。
24.六、本发明中,所述行走装置采用履带式结构,主要是考虑到井场道路、地形条件等因素,所述行走装置的履带式底盘表层采用耐高温阻燃橡胶材料制成,行走装置内部为金属骨架,所述金属骨架优选为“z”字形骨架,在井场道路路况不佳的情况下,实现信息侦察机器人最大程度的缓冲,同时满足高温下行走对抓地力的要求,保证恶劣道路状况下的该信息侦察机器人顺利通行。
25.七、本发明中,所述行走装置的最大行走速度1.5m/s,最大越障高度220mm,最大爬坡角度不低于38
°
,最大涉水深度350mm,可满足信息侦察机器人在井场内的侦察需求。
26.八、本发明中,所述行走装置中设有减震结构,所述减震结构优选为油压阻尼独立悬挂减震结构,保证信息侦察机器人整体行走稳定,同时保护上部功能模块,保证各功能模块稳定运行,同时确保机器人侦查时能平稳采集关键信息。
27.九、本发明中,所述行走装置上安装有超声波避障传感器,能进行自主避障,防止机器人因碰撞而损坏。
28.十、本发明中,所述自冷却保护模块的自冷却机构包括喷淋装置,当信息侦察机器人中自冷却保护模块的温度感应器检测到本体温度超过预设值(如:200℃)时,控制器向自冷却机构发出相应的启动指令,使该自冷却机构的喷淋装置开始工作。
附图说明
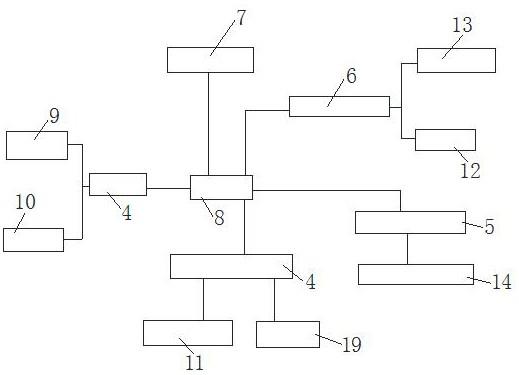
29.图1为本发明的系统连接图。
30.图2是本发明另一种实施方式的系统连接图。
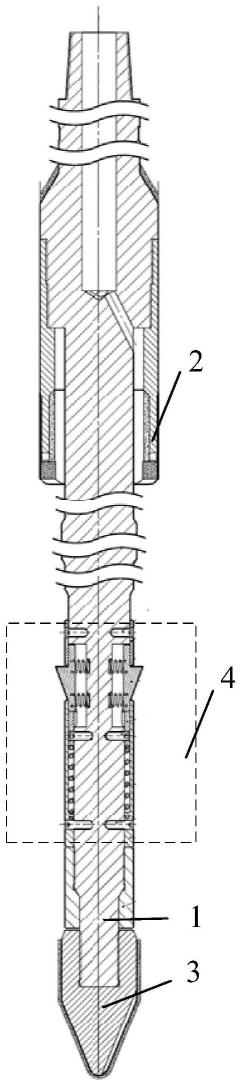
31.图3是本发明中信息侦察机器人的正视图。
32.图4是本发明中信息侦察机器人的左视图。
33.图5是本发明中信息侦察机器人的仰视图。
34.图6是信息侦察机器人的行走装置的结构放大图。
35.图7是信息侦察机器人的图像采集模块的结构示意图。
36.图8是信息侦察机器人的环境探测模块的结构示意图。
37.图9是图8的正视图。
38.图10是图8的左视图。
39.图11是信息侦察机器人的远程遥控模块的结构示意图。
40.其中,1、行走装置;2、升降云台;3、图像采集模块;4、环境探测模块;5、远程遥控模块;6、自冷却保护模块;7、报警模块;8、控制器;9、可见光摄像机;10、红外热成像仪;11、气体传感器;12、温度感应器;13、自冷却机构;14、手持远程遥控终端;15、镜头清洗机构;16、
减震结构;17、超声波避障传感器;18、喷淋装置;19、拾音器;20、涨紧轮;21、承重轮;22、导向轮;23、主驱动轮;24、传输天线。
具体实施方式
41.下面结合实施例对本发明作进一步地详细说明,但本发明的实施方式不限于此。
42.实施例1本实施例为最基本的一种实施方式,一种用于油气井井喷失控环境的信息侦察机器人,参考图1、3,涉及油气井井喷失控救援技术领域,包括行走装置1、升降云台2、图像采集模块3、环境探测模块4、远程遥控模块5、自冷却保护模块6、报警模块7和控制器8,所述升降云台2可在竖直方向上调节高度、水平方向上旋转,所述升降云台2为气体传感器11、拾音器19等结构的搭载主体,需尽可能实现升降云台2的全方位旋转,以提高侦察机器人气体检测、声音拾取等的角度与范围;所述升降云台2设置在行走装置1上,行走装置1带动升降云台2及升降云台2上搭载的机构行走,实现油气井井喷失控环境信息全面采集;所述图像采集模块3包括可见光摄像机9、红外热成像仪10,所述可见光摄像机9用于采集油气井井喷失控环境中的可见光信息,红外热成像仪10用于采集该环境的温度场分布信息,可见光摄像机9、红外热成像仪10也固定在信息侦察机器人的本体上;所述环境探测模块4包括气体传感器11和拾音器19,气体传感器11用于采集ch4、h2s、co2、co、o2等五种气体的气体含量信息,拾音器19用于采集现场环境中的声音信息;所述自冷却保护模块6包括有温度感应器12和自冷却机构13,温度感应器12用于检测机器人自身温度,自冷却机构13用于对机器人自身进行降温;所述远程遥控模块5包括手持远程遥控终端14,所述控制器8分别与行走装置1、升降云台2、图像采集模块3、环境探测模块4、远程遥控模块5、自冷却保护模块6、报警模块7控制连接。
43.参见图1,行走装置1、升降云台2、图像采集模块3、环境探测模块4、远程遥控模块5、自冷却保护模块6分别将各自采集的信息发送至控制器8,控制器8再将收集的信息传送至手持远程遥控终端14或将收集后的信息进一步分析、处理。
44.其中,自冷却保护模块6的温度感应器12将采集的机器人自身的温度信息反馈给控制器8,当温度高于预设值时,控制器8会发送指令给自冷却机构13,自冷却机构13开始工作,自冷却机构13对机器人本体进行降温。
45.所述远程遥控模块5一方面将手持远程遥控终端14的操作者的“指令”转换成控制器8可读信号,再将信号传递给控制器8,控制器8将信号转换成各执行机构可识别信号后,发送给各执行机构(包括气体传感器11、拾音器19、可见光摄像机9、红外热成像仪10、行走装置1等),以执行相应指令。
46.另外,控制器8还与报警模块7控制连接,当信息侦察机器人自身的各功能模块运行异常,或者某采集信息值超出预设值范围时,控制器8给报警模块7发送指令,给出报警信号。
47.实施例2一种用于油气井井喷失控环境的信息侦察机器人,涉及油气井井喷失控救援技术
领域,参考图2,包括行走装置1、升降云台2、图像采集模块3、环境探测模块4、远程遥控模块5、自冷却保护模块6、报警模块7和控制器8,以本公司某一型号的信息侦察机器人为例,便于阐述本发明的技术方案。本信息侦察机器人最大遥控距离可达1km,整体结构防水、防爆,抗高温能力高达600℃,可取代人员进行近井口高危区域信息侦察工作,实现高危作业区域无人化,实现了信息侦察环节无人化,极大提升了人员安全性。
48.本信息侦察机器人中,所述升降云台2可在竖直方向上调节高度、水平方向上旋转,所述升降云台2设置在行走装置1上,所述图像采集模块3包括可见光摄像机9、红外热成像仪10,可见光摄像机9、红外热成像仪10固定在信息侦察机器人本体上方,参考图示3或4或7;所述环境探测模块4包括气体传感器11和拾音器19,参考图3、8-10,气体传感器11用于采集ch4、h2s、co2、co、o2气体含量信息,所述拾音器19用于采集现场环境中的声音信息,气体传感器11和拾音器19安装在升降云台2上,可上下移动,便于全方位采集现场的声音信息和气体含量信息;所述自冷却保护模块6包括有温度感应器12和自冷却机构13,温度感应器12用于检测机器人自身温度,自冷却机构13用于对机器人自身进行降温,所述远程遥控模块5包括手持远程遥控终端14,参考图示11,为远程操控手柄,远程操控手柄上设有显示屏,用于展示信息侦察机器人的各个执行机构采集的信息,能实现可见光、热成像、气体组分及声音的三路视频信号切换,该远程操控手柄采用windows操作系统,兼容性强,能与计算机进行实时对接,进行数据传输,所述信息侦察机器人本体上还设有传输天线24,参见图3,用于辅助数据传输。
49.所述控制器8分别与行走装置1、升降云台2、图像采集模块3、环境探测模块4、远程遥控模块5、自冷却保护模块6、报警模块7控制连接。
50.本实施例中,所述远程遥控模块5基于windows操作系统,具有兼容性强的特点,并通过手持远程遥控终端14(如:遥控手柄)上对应按钮,完成机器人的行走、喷淋、气体检测、图像采集、声音拾取以及图传等指令操作。
51.优选的,本方案中,还可以配置故障诊断分析模块,用于分析信息侦察机器人的运行数据,便于诊断侦察机器人的运行情况。当侦察机器人运行出现异常时,控制器8向报警模块7发送指令,报警模块7进行报警。
52.本实施例中,所述升降云台2的最大上升高度1.8m,水平方向能360
°
连续旋转,参考图8-10,以满足气体传感器11采集气体含量信息以及拾音器19采集环境中的声音信息的要求。
53.本实施例中,所述可见光摄像机9与红外热成像仪10采用同一信息传输系统进行图像信息传送。可见光摄像机9与红外热成像仪10将收集后的数据传送至手持远程遥控终端14,手持远程遥控终端14的显示屏可用于显示侦察机器人的运行状态,将可见光摄像机9和红外热成像仪10在回传信息过程中的通道合并在一条图传通道上,采用同一信息传输系统进行图像信息传送,减少了图传通道的设计和布置,降低后期信息传输系统设计成本。
54.优选的,所述图像采集模块3采用目前先进的图传技术将可见光摄像机9采集的高清图像和红外热成像仪10生成的温度云图进行同步回传。
55.本实施例中,所述可见光摄像机9与红外热成像仪10的镜头也与控制器8控制连
接,接收控制器8发送的指令,实现镜头的水平角度、垂直角度的调节,所述可见光摄像机9与红外热成像仪10的镜头水平角度调节范围为0
°‑
360
°
,垂直角度调节范围为-90
°‑
90
°
。
56.本实施例中,所述图像采集模块3还包括镜头清洗机构15,用于对可见光摄像机9与红外热成像仪10的镜头进行清洗,保证在有水雾的抢险环境中,采集到的图像的清晰度符合要求。
57.本实施例中,所述行走装置1采用履带式结构,参考图3-6,所述行走装置1的履带式底盘表层采用耐高温阻燃橡胶材料制成,行走装置1内部为全金属骨架,还包括涨紧轮20、承重轮21、主驱动轮23、导向轮22以及减震结构16,配合实现行走装置1在该环境下的稳定行驶。
58.优选的,所述金属骨架为“z”字形骨架,这样的结构设计能对路况不佳情况下机器人进行最大程度的缓冲,同时满足高温下行走对抓地力的要求,保证了恶劣道路状况下的侦察机器人的正常通行。
59.本实施例中,所述行走装置1的最大行走速度1.5m/s,越障高度220mm,最大爬坡角度38
°
,最大涉水深度350mm,连续行走时间3h,静止状态下侦查时间约8h,运动状态下侦查时间约4h,可满足侦查需求。
60.本实施例中,所述行走装置1中设有减震结构16。
61.优选的,所述减震结构16为油压阻尼独立悬挂减震结构16,整体行走稳定,保证设置在行走装置1上方的功能模块正常运行,同时确保机器人侦查时能平稳采集关键信息,辅助供抢险救援专家指挥决策,实现信息侦察前端信息与后端指挥的实施同步。
62.本实施例中,所述行走装置1上安装有超声波避障传感器17,一般设置在行走装置1的前端能进行自主避障,防止机器人因碰撞而损坏。
63.本实施例中,所述自冷却保护模块6的自冷却机构13包括喷淋装置18,该模块充分考虑井喷失控着火后的机器人作业需要,当侦察机器人本体温度超过200℃时,报警模块7(在手持远程遥控终端14的警示灯指示)发出报警提示,开启喷淋装置18进行降温,极大提升了机器人在高温环境下的性能稳定性。
64.以上所述,仅是本发明的较佳实施例,并非对本发明做任何形式上的限制,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化,均落入本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。