技术特征:
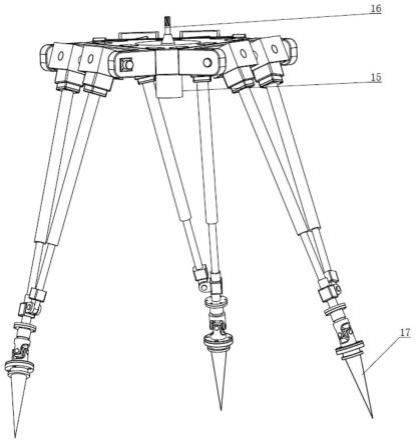
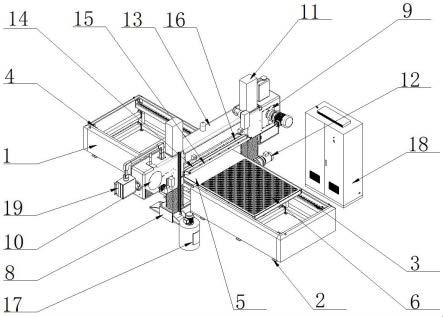
1.一种模块化可移动机器人,由操作平台模块、支撑连接件模块、末端执行器模块、与操作平台模块连接的三套以上的复合驱动支链模块组成;其特征在于,无专用的静平台,由支撑连接件模块连接固定件构成静平台;所述复合驱动支链模块包括支撑座(1)、被动转轴(2)、角度传感器(11)、第一驱动组件、第二驱动组件、球铰链组件;所述第一驱动组件包括第一推动杆(6a)、第一连接组件(7)、第一驱动单元(3a)、与第一驱动单元(3a)相连的第一套筒(5a);所述第一推动杆(6a)的一端通过移动副与第一套筒(5a)连接,所述第一推动杆(6a)的另一端与第一连接组件(7)固连;所述第二驱动组件包括第二推动杆(6b)、第二连接组件(8)、第二驱动单元(3b)、与第二驱动单元(3b)相连的第二套筒(5b);所述第二推动杆(6b)的一端通过移动副与第一套筒(5b)连接,所述第二推动杆(6b)的另一端与第二连接组件(8)固连;被动转轴(2)通过转动副安装在支撑座(1)上,角度传感器(11)设置在支撑座(1)上,用于测量被动转轴(2)的转角变化,再结合第一驱动单元(3a)和第二驱动单元(3b)的位置反馈信息求解末端执行器模块和静平台之间的位姿关系;所述第一驱动组件的第一驱动单元(3a)和所述第二驱动组件的第二驱动单元(3b)分别通过第一转轴(4a)和第二转轴(4b)与被动转轴(2)相连接,第一转轴(4a)的轴线和第二转轴(4b)的轴线相互平行,第一转轴(4a)和第二转轴(4b)的轴线与被动转轴(2)的轴线垂直并相交;第一连接组件(7)与第二连接组件(8)之间通过转动副相连,连接第一连接组件(7)和第二连接组件(8)的转动副轴线与转轴(4a)的轴线平行;所述第一连接组件(7)末端通过球铰组件与支撑连接件模块连接;所述复合驱动支链模块与操作平台模块之间为可拆卸结构,用于实现复合驱动支链模块与操作平台模块的多模态重构;所述末端执行器模块与操作平台模块通过螺纹连接;工作时,将静平台作为基准,控制末端执行器模块的六维运动,通过控制复合驱动支链模块中第一推动杆(6a)和第二推动杆(6b)的伸缩量,以调整安装在操作平台模块上末端执行器模块的位置和姿态,实现原位加工。2.根据权利要求1所述的模块化可移动机器人,其特征在于,所述球铰组件包括轴承支座(9)、虎克铰(10),所述轴承支座(9)与第一连接组件(7)相连,所述虎克铰(10)与轴承支座(9)通过转动副连接。3.根据权利要求1所述的模块化可移动机器人,其特征在于,所述操作平台模块采用切角的等边三角形平台,侧端设有多个定位销(13),用于复合驱动支链模块的定位连接。4.根据权利要求1所述的模块化可移动机器人,其特征在于,所述操作平台模块采用矩形平台,侧端设有多个定位销(13),四个侧端用于定位连接四个复合驱动支链模块。5.根据权利要求1所述的模块化可移动机器人,其特征在于,所述末端执行器包括铣刀。6.根据权利要求1所述的模块化可移动机器人,其特征在于,所述末端执行器为钻头。7.根据权利要求1所述的模块化可移动机器人,其特征在于,所述末端执行器为手爪。8.根据权利要求1所述的模块化可移动机器人,其特征在于,所述末端执行器为砂轮、3d打印喷头或刀具。
9.根据权利要求1所述的模块化可移动机器人,其特征在于,所述第一驱动单元、第二驱动单元为电机、气压系统或液压系统。10.根据权利要求1所述的模块化可移动机器人,其特征在于,所述支撑连接模块为锥钉、吸盘或磁铁块。
技术总结
本发明提供一种模块化可移动机器人,涉及机械设计与机械制造领域,可实现普通构件和大型工件内部及外部表面的原位车、铣、钻、磨削加工,包括操作平台模块、复合驱动支链模块、支撑连接件模块、末端执行器模块,三条复合驱动支链布置在操作平台上,复合驱动支链末端构件为虎克铰和一个转动副组成的球铰。本发明机构通过去除并联机构传统意义上的机身和静平台,由虎克铰连接固定件构成静平台,来实现加工位置的可移动,从而扩大了工作场景,实现大型工件内部及外部的原位加工。内部及外部的原位加工。内部及外部的原位加工。
技术研发人员:彭斌彬 王婉
受保护的技术使用者:南京理工大学
技术研发日:2022.01.19
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。