1.本技术涉及机器人关节驱动结构的技术领域,特别涉及一种双自由度直驱关节。
背景技术:
2.市面常见的关节型机械臂和腿足式机器人,大都采用伺服电机 高减速比减速器的传动方案,由于采用大减速比减速器,关节内摩擦力较大,不利于关节力控算法的实现。此外,由于多采用谐波减速器,减速比大,虽然实现了高力矩密度输出,但为取得较好的控制效果须增加额外的弹簧结构以实现柔顺性,但同时降低了力控通频带宽。此种传动方案在结构复杂性、成本、难易程度上均未体现出优势。该种方案多为集成度高的单一关节,多直接安装在所需关节处,以腿足式为例,每个关节均需安装该关节,会额外增加腿部惯量,影响摆腿速度。
技术实现要素:
3.本发明提出一种双自由度直驱关节,以改善现有技术中采用伺服电机 高减速比减速器以及谐波减速器所存在种种问题。
4.为实现上述目的,本发明提供一种双自由度直驱关节,包括一轴和二轴;一轴和二轴均采用无刷永磁电机和减速比≤10的一级行星减速器驱动;一轴和二轴的无刷永磁电机的电机轴同心相对放置;一轴的输出连接二轴的电机外壳,二轴整体可绕一轴360
°
旋转。
5.具体地,一轴包括一轴电机外壳、一轴电机定子、一轴端盖i、一轴轴承i、一轴端盖ii、一轴码盘、一轴码盘转轴、一轴电机轴、一轴电机转子、一轴外盖、一轴轴承ii、一轴行星减速器、一轴外行星架、一轴端盖iii、一轴内行星架、一轴轴承iii、一轴端盖iv和一轴轴承iv;二轴包括二轴电机外壳、二轴电机外壳后盖、二轴电机定子、二轴电机转子、二轴端盖i、二轴轴承i、二轴端盖ii、二轴码盘、二轴码盘转轴、二轴电机轴、二轴行星减速器内齿圈、二轴行星减速器、二轴行星架法兰、二轴内行星架、二轴轴承ii、二轴端盖iii和二轴轴承iii;一轴电机定子与一轴电机外壳相连接;一轴电机转子与一轴电机轴相连接;一轴轴承i置于一轴电机外壳和一轴电机轴的一端之间,通过一轴端盖i和一轴端盖ii固定;一轴电机轴的另一端与一轴行星减速器的太阳轮连接,一轴行星减速器的输入为太阳轮,输出为一轴外行星架;一轴轴承iii置于一轴电机轴和一轴内行星架之间,通过一轴端盖iii和一轴端盖iv固定;一轴轴承iv置于一轴行星减速器中一轴外行星架行星架和太阳轮之间,一轴轴承i和一轴轴承iv对一轴电机轴的形成2点稳定支撑;一轴码盘用于测量一轴电机转动角度,一轴码盘的外壳与一轴电机外壳连接,一轴码盘内转动部分与一轴码盘转轴相连接,一轴码盘转轴与一轴电机轴连接;一轴轴承ii置于一轴外盖和一轴外行星架之间,一轴轴承ii随着一轴外行星架转动而转动;二轴电机定子与二轴电机外壳相连接;二轴电机转子与二轴电机轴相连接;二轴轴承i置于二轴电机外壳后盖和二轴电机轴的一端之间,通过二轴端盖i和二轴端盖ii固定;二轴电机轴的另一端与二轴行星减速器的太阳轮连接,二轴行星减速器的输入为太阳轮,输出为二轴行星架法兰;二轴轴承ii置于二轴电机轴和二轴行星架法
兰之间,通过二轴端盖iii固定;二轴轴承iii置于二轴行星减速器的太阳轮与一轴外行星架之间,通过二轴轴承i和二轴轴承iii对二轴电机轴的形成2点稳定支撑;二轴码盘用于测量二轴电机转动角度,二轴码盘的外壳与二轴电机外壳后盖连接,二轴码盘内转动部分与二轴码盘转轴相连接,二轴码盘转轴与二轴电机轴连接;一轴通过一轴外行星架与二轴的二轴行星减速器内齿圈相连接,二轴行星减速器内齿圈与二轴电机外壳相连接。
6.进一步地,一轴电机外壳上装有一轴散热片。
7.进一步地,二轴电机外壳上装有二轴散热片。
8.进一步地,一轴电机定子与一轴电机外壳用胶水粘接。
9.进一步地,一轴电机转子与一轴电机轴用胶水粘接。
10.进一步地,二轴电机定子与二轴电机外壳用胶水粘接相连接。
11.进一步地,二轴电机转子与二轴电机轴用胶水粘接相连接。
12.进一步地,一轴码盘和二轴码盘的安装均采用内嵌式结构。
13.进一步地,二轴行星架法兰为对外输出轴,可与链条、连杆、带或钢丝绳连接。
14.本发明具有以下有益效果:
15.1、本发明的双自由度直驱关节采用无刷永磁力矩电机 低减速比(减速比≤10)行星减速器,无刷永磁力矩电机提供了可靠的大扭矩,低减速比减速器实现的更低的内摩擦力,更利于关节力控实现;
16.2、双自由度关节由两个同心相对布置的电机构成,两个轴结构相同,元器件相同,均为嵌套式安装,可拆分成两个独立的关节,既可实现单自由度关节也可实现双自由度关节,针对不同应用场合选择不同的自由度结构形式;
17.3、小减速比减速器的使用,提高了通频带宽,减小了内摩擦力,关节力控难度降低,更利于实现可靠的力控行走控制,该结构关节具有大扭矩密度、高反向驱动性能优势,不需额外的弹簧结构和高成本的谐波减速器,在控制难易程度、成本、结构复杂性上具有非常大的优势;
18.4、双自由度直驱关节可以更好的降低腿足式机器人的腿部惯量,电机及减速器等机构均可布置在上方,通过带、链等轻量化传动机构传递转矩至向下所需关节,不必像常见的集成关节必须安装在所需转动关节处,从而实现低惯量设计,更利于提高摆腿频率,增快行走速度。
附图说明
19.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
20.图1为一轴的整体示意图;
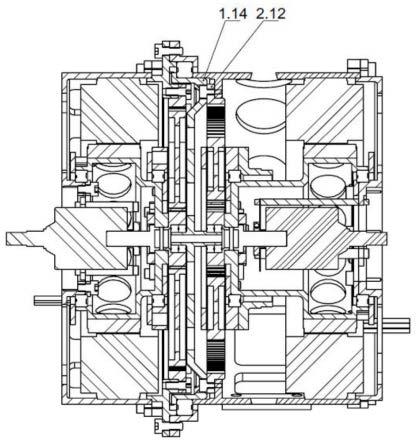
21.图2为一轴的剖视图;
22.图3为一轴的爆炸图;
23.图4为二轴的整体示意图;
24.图5为二轴的剖视图;
25.图6为二轴的爆炸图;
26.图7为一轴和二轴的组装图;
27.图8为一轴和二轴的剖视图。
28.图中:1.1-一轴散热片,1.2-一轴电机外壳,1.3-一轴电机定子,1.4-一轴端盖i,1.5-一轴轴承i,1.6-一轴端盖ii,1.7-一轴码盘,1.8-一轴码盘转轴,1.9-一轴电机轴,1.10-一轴电机转子,1.11-一轴外盖,1.12-一轴轴承ii;1.13-一轴行星减速器,1.14-一轴外行星架,1.15-一轴端盖iii,1.16-一轴内行星架,1.17-一轴轴承iii,1.18-一轴端盖iv,1.19-一轴轴承iv,
29.2.1-二轴散热片,2.2-二轴电机外壳,2.3-二轴电机外壳后盖,2.4-二轴电机定子,2.5-二轴电机转子,2.6-二轴端盖i,2.7-二轴轴承i,2.8-二轴端盖ii,2.9-二轴码盘,2.10-二轴码盘转轴,2.11-二轴电机轴,2.12-二轴行星减速器内齿圈,2.13-二轴行星减速器,2.14-二轴行星架法兰,2.15-二轴内行星架,2.16-二轴轴承ii,2.17-二轴端盖iii,2.18-二轴轴承iii。
具体实施方式
30.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.本实施例提供一种成本低、可靠性高的双自由度直驱关节,包括一轴和二轴;一轴和二轴均采用无刷永磁电机和减速比≤10的一级行星减速器驱动;一轴和二轴的无刷永磁电机的电机轴同心相对放置;一轴的输出连接二轴的电机外壳,二轴整体可绕一轴360
°
旋转。
32.一轴包括一轴散热片1.1、一轴电机外壳1.2、一轴电机定子1.3、一轴端盖i1.4、一轴轴承i1.5、一轴端盖ii1.6、一轴码盘1.7、一轴码盘转轴1.8、一轴电机轴1.9、一轴电机转子1.10、一轴外盖1.11、一轴轴承ii1.12、一轴行星减速器1.13、一轴外行星架1.14、一轴端盖iii1.15、一轴内行星架1.16、一轴轴承iii1.17、一轴端盖iv1.18和一轴轴承iv1.19;一轴电机定子1.3与一轴电机外壳1.2用胶水粘接,并且在一轴电机外壳1.2上装有一轴散热片1.1,用来释放运行关节过程中电机产生的热量;一轴电机转子(1.10)与一轴电机轴1.9用胶水粘接;一轴轴承i1.5置于一轴电机外壳1.2和一轴电机轴1.9的一端之间,通过一轴端盖i1.4和一轴端盖ii1.6固定;一轴电机轴1.9的另一端与一轴行星减速器1.13的太阳轮连接,一轴行星减速器1.13的输入为太阳轮,输出为一轴外行星架1.14;一轴轴承iii1.17置于一轴电机轴1.9和一轴内行星架1.16之间,通过一轴端盖iii1.15和一轴端盖iv1.18固定;一轴轴承iv1.19置于一轴行星减速器1.13中一轴外行星架1.14和太阳轮之间,一轴轴承i1.5和一轴轴承iv1.19对一轴电机轴1.9的形成2点稳定支撑;一轴码盘1.7用于测量一轴电机转动角度,一轴码盘1.7的外壳与一轴电机外壳1.2连接,一轴码盘1.7内转动部分与一轴码盘转轴1.8相连接,一轴码盘转轴1.8与一轴电机轴1.9连接,进而实现一轴码盘1.7内转动部分与一轴电机轴1.9的间接连接,一轴码盘1.7的安装采用内嵌式结构,使其嵌入关节内部,使关节整体更美观,无突兀部件,减少运行过程中的危险;一轴轴承ii1.12置于一轴外盖1.11和一轴外行星架1.14之间,一轴轴承ii1.12随着一轴外行星架1.14转动而转
动;一轴外行星架1.14为一轴的输出法兰,与二轴电机外壳2.2相连接。
33.二轴包括二轴散热片2.1、二轴电机外壳2.2、二轴电机外壳后盖2.3、二轴电机定子2.4、二轴电机转子2.5、二轴端盖i2.6、二轴轴承i2.7、二轴端盖ii2.8、二轴码盘2.9、二轴码盘转轴2.10、二轴电机轴2.11、二轴行星减速器内齿圈2.12、二轴行星减速器2.13、二轴行星架法兰2.14、二轴内行星架2.15、二轴轴承ii2.16、二轴端盖iii2.17和二轴轴承iii2.18;二轴电机定子2.4与二轴电机外壳2.2用胶水粘接,并且在二轴电机外壳2.2上装有二轴散热片2.1,用来释放运行关节过程中电机产生的热量;二轴电机转子2.5与二轴电机轴2.11用胶水粘接;二轴轴承i2.7置于二轴电机外壳后盖2.3和二轴电机轴2.11的一端之间,通过二轴端盖i2.6和二轴端盖ii2.8固定;二轴电机轴2.11的另一端与二轴行星减速器2.13的太阳轮连接,二轴行星减速器2.13的输入为太阳轮,输出为二轴行星架法兰2.14;二轴轴承ii2.16置于二轴电机轴2.11和二轴行星架法兰2.14之间,通过二轴端盖iii2.17固定;二轴轴承iii2.18置于二轴行星减速器2.13的太阳轮与一轴外行星架1.14之间,通过二轴轴承i2.7和二轴轴承iii2.18对二轴电机轴2.11的形成2点稳定支撑;二轴码盘2.9用于测量二轴电机转动角度,二轴码盘2.9的外壳与二轴电机外壳后盖2.3连接,二轴码盘2.9内转动部分与二轴码盘转轴2.10相连接,二轴码盘转轴2.10与二轴电机轴2.11连接,进而实现二轴码盘2.9内转动部分与二轴电机轴2.11的间接连接,二轴码盘2.9的安装采用内嵌式结构,使其嵌入关节内部,使关节整体更美观,无突兀部件,减少运行过程中的危险。
34.一轴通过一轴外行星架1.14与二轴的二轴行星减速器内齿圈2.12相连接,二轴行星减速器内齿圈2.12与二轴电机外壳(2.2)相连接,所以二轴整体成为了一轴的输出,二轴整体可以绕一轴360
°
旋转;二轴的二轴行星架法兰2.14为对外输出轴,其可以连接链条、连杆、钢丝绳、带等传动机构,进行传动。
35.上述双自由度直驱关节,具有两个旋转自由度,亦可以拆分成独立自由度关节,两个旋转自由度的轴分别为一轴和二轴,两个轴均采用无刷永磁电机 低减速比(减速比≤10)一级行星减速器驱动,电机轴同心相对放置,一轴的输出轴连接二轴的电机外壳,二轴整体可绕一轴360
°
旋转,大范围的旋转角度,为关节提供了大范围的运动空间。二轴的输出端为盘式法兰,若需360
°
旋转则需连接链条或同步带传动机构将动力传递至向下关节即可,若要实现高刚度,则连接连杆机构即可。本发明的双自由关节采用嵌套式安装,内部集成了电机、减速器、多圈绝对值码盘,可以更好的实现关节力控及腿足式机器人的低惯量设计。关节嵌套集成电机、减速器、码盘等传动及控制机构,电机同轴相对布置,双关节元器件相同,互换性好,取消采用谐波减速器的一体化关节方案,通频带宽高,在控制难易程度、成本、结构复杂性上具有明显优势。输出端都集成在关节内,只需采用连杆、带、链条、钢丝绳等轻量化传动机构将动力传递至向下关节即可,不必将全部机构都安装在所需关节,从而可以进一步减小腿部低惯量,实现腿部重心上移,增加摆腿频率,增高速度。
36.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。