1.本实用新型属于航天实验设备领域,尤其是涉及一种气浮式全角度多层次零重力卸载系统。
背景技术:
2.随着我国航天技术的不断发展,包括深空探测、火星探测、月球探测等众多型号任务,其搭载的航天器产品试验要求越来越高,以圆形柔性太阳翼为代表,在其保证足够的展开刚度的同时,轻质量及展开精度要求也进一步提高。后续轻型化精细化的航天器产品结构愈加复杂,展开精度也随之升高,展开运动轨迹特殊的情况亦层出不穷。后续的航天器产品更需要在地面进行一系列精准的零重力展开试验,保证其在轨的正常工作状态。同时对零重力卸载装置的跟随速度、质量、惯量等要求也逐步提高。
3.受制于供气管路的影响,现有极坐标式、双摇臂式悬吊类零重力卸载装置均以机械回转轴承加机械滑车、滑轮或以气浮回转轴承加机械滑车、滑轮进行结合,但对于包括圆形柔性太阳翼在内的精细化轻量化的航天器产品却无法适用。轻量化的航天器产品对其卸载装置的要求更高,主要包括纯被动跟随的响应速度、卸载装置对航天器产品的附加惯量、卸载装置对航天器产品的干扰力矩等。以圆形柔性太阳翼零重力卸载为例,其翼体为柔性结构,自身质量较小,允许受干扰余量极低。此外,在其地面展开试验过程中,其依然具备复杂展开结构的常见零重力卸载问题,即其质心的运动轨迹为非既定不规律曲线。
技术实现要素:
4.有鉴于此,本实用新型旨在提出一种气浮式全角度多层次零重力卸载系统,以解决现有技术不足,以满足多种轻型化航天器产品地面零重力展开的试验验证需求。
5.为达到上述目的,本实用新型的技术方案是这样实现的:
6.一种气浮式全角度多层次零重力卸载系统,包括支撑架上设置的调平机构,调平机构能够带动气浮主轴系统线性位移,且气浮主轴系统下端通过悬吊单元固定连接至柔性太阳翼的翼架上,气浮主轴系统是太阳翼浮动悬挂支架,调平机构一侧设置中心对准单元,且中心对准单元用于检测太阳翼的展开状态,气浮主轴系统包括气浮轴及其外围转动套接的若干气浮滑轨,若干气浮滑轨沿气浮轴的轴向均布,每个气浮滑轨对应设置一个配重轴,且每个配重轴的一端转动套接至气浮轴的外围,每个气浮滑轨的一端均通过一个悬吊单元固定连接至太阳翼的翼架上。
7.进一步的,所述线性运动组件包括y向线性模组及其上固定安装的x向线性模组,x向线性模组通过随动转盘转动套接至气浮主轴系统的一端,y向线性模组用于x向线性模组的y向位移,x向线性模组用于气浮主轴系统的x向线性位移。
8.进一步的,所述气浮轴包括上端盖、下端盖、芯轴、第一外轴组件和第二外轴组件,芯轴外围由上至下分别套接第一外轴组件和第二外轴组件,且第一外轴组件的一端固定连接至第二外轴组件的一端,第一外轴组件包括第一定子及其外围转动套接的第一转子,第
一外轴组件的第一定子上端通过上端盖固定套接至芯轴外围,第二外轴组件的第一定子下端通过下端盖固定套接至芯轴外围,第一外轴组件的第一定子通过一个定位销固定连接至第二外轴组件的第一定子,芯轴是中空管体结构,且芯轴的侧壁设有若干第一通孔,第一定子的侧壁设有第二通孔,第一定子外围和第二定子内圈设有第一间隙,上端盖上安装注气管,注气管向芯轴内填充高压介质。
9.进一步的,所述芯轴外围固定套接串接组件,串接组件的两端分别固定连接至第一外轴组件的下端、第二外轴组件的上端,串接外轴组件包括若干第三外轴组件,且若干第三外轴组件沿芯轴的轴向依次首尾相连接,第三外轴组件包括第二定子和第二转子,第二定子的内圈固定套接至芯轴外围,第二定子的外围转动套接第二转子,第二定子的侧壁设有第三通孔,第二定子外围与第二转子内圈之间设有第二间隙,高压介质依次通过芯轴内部、第一通孔、第三通孔连通至所述第二间隙。
10.进一步的,所述第一定子包括第一管体及其下端外围设置的托台,第一转子是中空管体结构,第一转子的下端与托台的上端设有第三间隙,托台上分别设有第四通孔和第五通孔,第四通孔和第五通孔相互垂直设置,高压介质通过芯轴内部、第一通孔、第四通孔和第五通孔连通至第三间隙。
11.进一步的,所述第一转子的侧壁设有第六通孔,且第一转子内圈设有环槽,高压介质依次通过芯轴内部、第一通孔、第二通孔、第一间隙和环槽连通至第六通孔。
12.进一步的,所述第一转子外围设有安装槽,第六通孔位于安装槽底部,每个气浮滑轨通过一个轴臂固定安装至安装槽内,且配重轴的一端固定连接至第一转子的外围,第六通孔通过导管连通至气浮滑轨内部。
13.进一步的,所述气浮滑轨包括气浮外壳,气浮外壳外围设置固定块,固定块通过轴臂转动套接至气浮轴外围,气浮外壳中部沿轴向设有滑孔,滑轴外围位于滑孔内,滑轴的两端分别固定安装挡板和挂板,气浮外壳的一侧设有气嘴,气浮外壳内圈与滑孔外围设有间隙,气浮外壳侧壁设有注气孔,气嘴通过导管连通至气浮轴,气浮轴通过外接注气装置向气嘴内填充高压介质,高压介质通过气嘴、注气孔连通至所述间隙后,高压介质在间隙内形成静压气膜,静压气膜是气浮外壳与滑轴之间的润滑结构。
14.进一步的,所述气浮外壳包括第一气浮块和第二气浮块,且第一气浮块和第二气浮块通过连板相连接,第一气浮块和第二气浮块中部分别设有一个滑孔,且两个滑孔同轴设置,第一气浮块和第二气浮块的结构相同,第一气浮块的第一侧固定安装一个固定块,第一气浮块的第二侧固定安装一个气嘴,第一气浮块的侧壁设有环形气道,第一气浮块侧壁沿周向设有若干注气孔,且每个出气孔均连通至环形气道,高压介质通过气嘴、环形气道和注气孔连通至所述间隙。
15.进一步的,所述环形气道的数量为多个,且多个环形气道沿第一气浮块的轴向分布,第一气浮块上设有均气道,每个环形气道均连通至均气道,高压介质通过气嘴、均气道、环形气道和注气孔连通至所述间隙。
16.相对于现有技术,本实用新型所述的一种气浮式全角度多层次零重力卸载系统具有以下有益效果:该系统满足了以圆形柔性太阳翼为代表的众多轻型化航天器产品地面展开试验时,对地面设备提出的极低干扰力矩、非既定轨迹质心位置适应、跟随全被动迅速响应等高要求,该系统可满足运转过程中无气管干扰、各悬吊点可到达指定环形区域内任意
位置,区域半径覆盖范围可调、空间布局紧凑,最小悬吊点间距≤5mm。
附图说明
17.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
18.图1为本实用新型实施例所述的一种气浮式全角度多层次零重力卸载系统的结构示意图;
19.图2为本实用新型实施例所述的气浮主轴系统的结构示意图;
20.图3为本实用新型实施例所述的调平机构的结构示意图;
21.图4为本实用新型实施例所述的气浮轴的剖面示意图;
22.图5为本实用新型实施例所述的第一定子的结构示意图;
23.图6为本实用新型实施例所述的第一转子的结构示意图;
24.图7为本实用新型实施例所述的气浮滑轨的结构示意图;
25.图8为本实用新型实施例所述的气浮滑轨的正视图;
26.图9为本实用新型实施例所述的第一气浮块第一剖面示意图;
27.图10为本实用新型实施例所述的第一气浮块第二剖面示意图。
28.附图标记说明:
29.1-支撑架;2-调平机构;21-x向线性模组;22-y向线性模组;3-气浮主轴系统;31-气浮轴;311-上端盖;312-下端盖;313-芯轴;3131-第一通孔;314-第一外轴组件;3141-第一定子;31411-第一管体;31412-托台;31413-第二通孔;3142-第一转子;31421-第六通孔;31422-环槽;31423-安装槽;315-第二外轴组件;316-第三外轴组件;32-气浮滑轨;321-气浮外壳;3211-第一气浮块;3212-连板;3213-第二气浮块;3214-环形气道;3215-均气道;3216-注气孔;3217-节流阀;322-滑轴;323-挡板;324-挂板;325-固定块;326-气嘴;33-配重轴;34-轴臂;35-导管;4-中心对准单元;5-悬吊单元;6-柔性太阳翼。
具体实施方式
30.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
31.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
32.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地
连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
33.下面将参考附图并结合实施例来详细说明本实用新型。
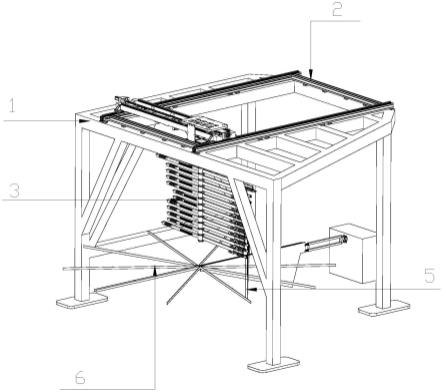
34.如图1-10所示,受制于供气管路的影响,现有极坐标式、双摇臂式悬吊类零重力卸载装置均以机械回转轴承加机械滑车、滑轮或以气浮回转轴承加机械滑车、滑轮进行结合,但对于包括圆形柔性太阳翼6在内的精细化轻量化的航天器产品却无法适用。轻量化的航天器产品地面展开试验过程中,其质心的运动轨迹多为非既定不规律曲线,并且实验结果极易受地面试验设备的影响,需要设备轻质量小惯量高强度的同时,旋转关节的极低干扰力矩也作为主要技术指标要求,对于此情况,本实用新型设计了一种气浮式全角度多层次零重力卸载系统,包括支撑架1,支撑架1是桁架结构,支撑架1作为整套系统的构建基础,保证整套系统的安全稳定,支撑架1上设置调平机构2,调平机构2是气浮主轴系统3的姿态调整装置,调平机构2能够带动气浮主轴系统3线性位移,且气浮主轴系统3下端通过悬吊单元5固定连接至柔性太阳翼6的翼架上,气浮主轴系统3是太阳翼浮动悬挂支架,气浮主轴轴系实现柔性太阳翼6展开过程中对中心机构只产生极低干扰力矩,并负载整套圆形太阳翼系统(或其他航天器产品的全部质量),分为上下多层气浮轴31承结构,调平机构2一侧设置中心对准单元4,中心对准单元4包括ccd相机,ccd相机用于检测太阳翼的展开状态,气浮主轴系统3包括气浮轴31及其外围转动套接的若干气浮滑轨32,若干气浮滑轨32沿气浮轴31的轴向均布,每个气浮滑轨32对应设置一个配重轴33,且每个配重轴33的一端转动套接至气浮轴31的外围,每个气浮滑轨32的一端均通过一个悬吊单元5固定连接至太阳翼的翼架上,该系统满足了以圆形柔性太阳翼6为代表的众多轻型化航天器产品地面展开试验时,对地面设备提出的极低干扰力矩、非既定轨迹质心位置适应、跟随全被动迅速响应等高要求,该系统可满足运转过程中无气管干扰、各悬吊点可到达指定环形区域内任意位置,区域半径覆盖范围可调、空间布局紧凑,最小悬吊点间距≤5mm。
35.一种气浮式全角度多层次零重力卸载系统,其核心结构为一种可二次供气的串联式气浮主轴系统,通过与摇臂臂杆及其末端气浮设备相结合,为摇臂类航天器产品的地面零重力展开试验提供卸载,同时具备上下多层次的设计,可圆满解决以圆形柔性太阳翼为代表的航天器机构产品在地面模拟零重力环境实施展开试验的技术问题,同时可以解决相当一部分航天器产品在地面展开实验过程中,其质心位置轨迹随机变化而导致的卸载装置难以快速跟随适应的难题。
36.线性运动组件包括y向线性模组22及其上固定安装的x向线性模组21,x向线性模组21通过随动转盘转动套接至气浮主轴系统3的一端,y向线性模组22用于x向线性模组21的y向位移,x向线性模组21用于气浮主轴系统3的x向线性位移,其中y向线性模组22和x向线性模组21可通过现有技术的丝杠模组进行实现,此处不在赘述,x向线性模组21的滑台上设置ccd相机,ccd相机负责在展开试验过程中,对太阳翼中心机构及太阳翼本体上的若干把标点进行轨迹识别,经控制系统联合两方向线性模组对太阳翼位置进行实时跟踪,随动转盘的上端固定连接至x线性模组的滑台上,在展开过程中,气浮主轴系统3不仅需要跟随主轴进行位置转变,还需要进行角度跟转变跟随,角度随动转盘实现此功能,且角度随动转盘为现有技术。
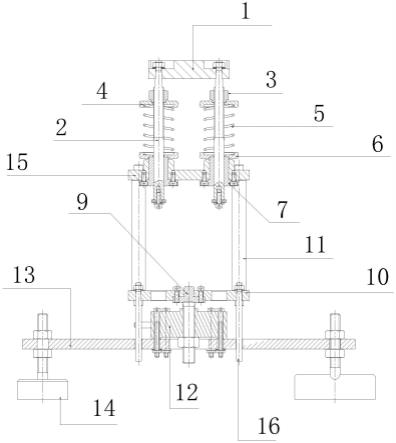
37.气浮轴31包括上端盖311、下端盖312、芯轴313、第一气浮组件和第二气浮组件,其中芯轴313是整套系统的主要受力承载部件,芯轴313外围由上至下分别套接第一气浮组件和第二气浮组件,且第一气浮组件的一端固定连接至第二气浮组件的一端,第一气浮组件和第二气浮组件的结构相同且相互对称设置,第一气浮组件包括第一定子3141及其外围转动套接的第一转子3142,第一气浮组件的第一定子3141上端通过上端盖311固定套接至芯轴313外围,第二气浮组件的第一定子3141下端通过下端盖312固定套接至芯轴313外围,第一气浮组件的第一定子3141通过一个定位销固定连接至第二气浮组件的第一定子3141,芯轴313是中空管体结构,且芯轴313的侧壁设有若干第一通孔3131,第一定子3141的侧壁设有第二通孔31413,第一通孔3131和第二通孔31413一一对应,第一定子3141外围和第二定子内圈设有第一间隙,上端盖311上安装注气管,注气管向芯轴313内填充高压介质,高压介质依次通过芯轴313内部、第一通孔3131、第二通孔31413连通至所述第一间隙,根据不同太阳翼的规格需求,芯轴313外围固定套接串接组件,串接组件的两端分别固定连接至第一气浮组件的下端、第二气浮组件的上端,串接外轴组件包括若干第三气浮组件,且若干第三气浮组件沿芯轴313的轴向依次首尾相连接,如图4所示为串接组件包括一个第三气浮组件,第三气浮组件包括第二定子和第二转子,第二定子的内圈固定套接至芯轴313外围,第二定子的外围转动套接第二转子,第二定子的侧壁设有第三通孔,第二定子外围与第二转子内圈之间设有第二间隙,高压介质依次通过芯轴313内部、第一通孔3131、第三通孔连通至所述第二间隙,高压介质在第一间隙、第二间隙内产生静压气膜,静压气膜用于隔开转子与定子,减小转子与定子相对运动时的摩擦力,芯轴313可以实现多个气浮式转动关节串联供气并且运动解耦,且气压、流量一致、转动关节具有强承载能力、抗倾覆力矩,且气浮组件采用模块化设计,装调简捷。
38.第一定子3141上端与上端盖311下端之间、第一定子3141下端与第二定子上端之间、两两第二定子之间、第二定子与下端盖312上端之间分别设有用于密封的密封圈,上端盖311是芯轴313的上部端盖,与芯轴313通过螺钉连接,配合面具有轴向密封圈,保证芯轴313中部气腔的密封性,同时中心开有供气孔,为整个气腔进行供气,下端盖312与芯轴313通过螺钉连接,配合面具有轴向密封圈,保证气腔的密封性,其主要作用为紧固全部轴承定子并且承全部轴承上的负载。
39.第一定子3141与第二定子的结构相同,第一定子3141包括第一管体31411及其下端外围设置的托台31412,第一转子3142和第二转子的结构相同,第一转子3142是中空管体结构,第一转子3142的下端与托台31412的上端设有第三间隙,托台31412上分别设有第四通孔和第五通孔,第四通孔和第五通孔相互垂直设置,高压介质通过芯轴313内部、第一通孔3131、第四通孔和第五通孔连通至第三间隙,高压介质在第三间隙上静压气膜,静压气膜用于承托第一转子3142,减小第一转子3142与托台31412相对运动时的摩擦力。
40.第一转子3142的侧壁设有第六通孔31421,且第一转子3142内圈设有环槽31422,高压介质依次通过芯轴313内部、第一通孔3131、第二通孔31413、第一间隙和环槽31422连通至第六通孔31421,第一转子3142外围设有安装槽31423,第六通孔31421位于安装槽31423底部,外接装置一端外围固定安装至安装槽31423内,且第六通孔31421连通至外接装置内部,第一转子3142的环槽31422将静压气膜面上的气体再次聚拢,环槽31422上开第六通孔31421,对应位置外部开摇臂接口安装槽31423,用于安装摇臂,且每个气浮组件均可向
外二次供气,气压、流量一致。
41.气浮滑轨32包括气浮外壳321、滑轴322、挡板323、挂板324、固定块325和气嘴326,气浮外壳321中部沿轴向设有滑孔,滑轴322外围位于滑孔内,且滑轴322能够沿滑孔轴向滑动,滑轴322的两端分别固定安装挡板323和挂板324,滑轴322用于进行产品对接装配方向上的无摩擦运动及产品的重量承载,挡板323的外围尺寸、挂板324的外围尺寸均大于滑孔的内圈尺寸,气浮外壳321的外围通过固定块325固定安装至外接装置,气浮外壳321的第二侧设有气嘴326,气浮外壳321内圈与滑孔外围设有间隙,气浮外壳321侧壁设有注气孔3216,气嘴326通过管路连通至注气装置,注气装置向气嘴326内填充高压介质,高压介质通过气嘴326、注气孔3216连通至所述间隙后,高压介质在间隙内形成静压气膜,其中,挡板323其主要作用为限制滑轴322不会脱出于气浮外壳321,在挡板323上可开多个安装孔,可为搭载传感器、控制器等装置提供接口;而固定块325用于将气浮外壳321有基准的安装于临时搭建的支撑架1上,为滑轴322的相对位置调整提供一个测量基础,固定块325上端中部设有安装及调平螺纹孔,工作人员通过安装及调平螺纹孔将整套装置安装于临时搭建的支撑架1上,并且根据滑轴322的运动状态将其调平;外接的供气设备连通至气嘴326为装置进行整体供气,使滑轴322能够良好的在气浮滑套内进行运动;挂板324用于限制滑轴322不会由后端脱出,并且将悬挂点处进行收拢,避免多个滑轴322装置协同装配作业时产生相互干扰,该气浮滑轨32解决了航天器产品在各场地之间转场后装配受传统气浮式超平支撑平台难以运输调平的限制,可以满足航天器产品在临时搭建的支撑架1上快速的进行无应力装配及解锁分离试验,极大的缩短了产品的运转调试周期,降低了产品的运输、时间、试验等成本与难度。
42.气浮外壳321包括第一气浮块3211、第二气浮块3213和两个连板3212,且两个连板3212相互平行设置,每个连板3212的两端分别固定连接装置第一气浮块3211的一端、第二气浮块3213的一端,第一气浮块3211和第二气浮块3213中部分别设有一个滑孔,且两个滑孔同轴设置,滑轴322的外围分别位于连个滑孔内、两个连板3212之间,在实施时气浮外壳321摒弃传统组合式的理念,整体进行结构设计,为整套装置提供足够的负载刚度,气体管道布局在其侧壁上,因此第一气浮块3211、两个连板3212和第二气浮块3213为机加工一体结构。
43.第一气浮块3211和第二气浮块3213的结构相同,第一气浮块3211的第一侧固定安装一个固定块325,第一气浮块3211的第二侧固定安装一个气嘴326,第一气浮块3211的侧壁设有环形气道3214,第一气浮块3211侧壁沿周向设有若干注气孔3216,且每个出气孔均连通至环形气道3214,高压介质通过气嘴326、环形气道3214和注气孔3216连通至所述间隙。
44.环形气道3214的数量为多个,且多个环形气道3214沿第一气浮块3211的轴向分布,第一气浮块3211上设有均气道3215,每个环形气道3214均连通至均气道3215,高压介质通过气嘴326、均气道3215、环形气道3214和注气孔3216连通至所述间隙,每个注气孔3216的出气端内均安装节流阀3217,在适用于该气浮滑轨32能够在临时搭建的球杆架上进行安装调节,从而使航天器产品在各个厂区运转后快速的进行无应力装配及解锁分离试验,极大的缩短了产品的运转调试周期。在试验过程中,产品由串联好恒力弹簧的绳索悬挂于装置负载板上,气浮滑轨32装置全程处于完全被动的工作状态下对产品进行随动,高压介质
通过气嘴326、均气道3215、环形气道3214和注气孔3216连通至所述间隙内时,使第一气浮块3211内圈、第二气浮块3213内圈与滑轴322外围产生静压气膜,滑轴322处于被静压气膜托起的状态下进行随动,滑轴322与第一气浮块3211和第二气浮块3213无摩擦干扰,不会对产品产生额外影响,由此便可以满足航天器产品在临时搭建的支撑架1上快速的进行无应力装配及解锁分离试验。
45.气浮外壳321的一端还设置拉力采集单元,拉力采集单元上设置多种连接接口,可安装于不同末端气浮设备上,与传感器通过信号线连接,实时采集、存储、传输悬吊单元5上的拉力数据。
46.悬吊单元5包括若干悬挂吊绳,且每个气浮滑轨32配设一个悬挂吊绳,悬挂吊绳主要用于滑轨与柔性太阳翼6高度调节、拉力适应和传感器连接等功能,悬挂吊绳包括弹簧、拉线和压力传感器,压力传感器的一端通过弹簧固定连接至滑轨11的一端,压力传感器的另一端通过拉线固定连接至太阳翼的展开架,悬挂吊绳用于连接太阳翼各个单元的悬吊点,其上附有恒力弹簧、绳长调节机构、拉力传感器等,其中拉线的实现方式可以选用凯夫拉绳或钢丝绳。
47.本实用新型的控制方式是通过控制器实现的,控制器是现有技术的plc,其中线性运动组件的电机、检测组件的悬挂吊绳上的压力传感器均信号连接至plc,在ccd相机实施反馈太阳翼中心位置的信息并信号传输至plc,plc根据太阳翼位置信息控制x、y两方向的线性模组位移,使的摇臂轴中心对太阳翼的中心位置进行实时跟踪,此外,摇臂轴与滑轨末端形成完全被动的极坐标式范围覆盖,当线性模组的跟随精度不准确时,由摇臂轴和末端滑轨进行位置补偿,从而使试验过程中太阳翼的零重力卸载一直处于良好状态。
48.气浮主轴供气的的工作过程:
49.多层气浮主轴上包括多组气浮组件,工作人员使用时仅需更换不同长度的芯轴313进行调整,即可适应所需不同数量摇臂的卸载工况。工作过程中,高压气体首先由上端盖311的注气管供入芯轴313的中部气腔,在供气芯轴313中心腔内形成一个压力稳定的高压气腔,高压气腔内的气体通过其第一通孔3131将气流供给各个气浮组件的第一定子3141的第二通孔31413内,且每个第二通孔31413内均安装现有技术的节流装置,气体经过节流装置后在各气浮组件定子与转子之间形成稳定的静压气膜,对轴承回转方向和止推方向进行气体润滑,气体经过第一次润滑后,在第一转子3142的环形腔内再次进行聚拢充压,由第一转子3142上的第六通孔31421通往其他的气浮装置,工作过程中,各组气浮组件互相各不干扰,可分别对其上摇臂上安装的其他气浮装置(包括气浮轴31、气浮滑轨32,气浮滑轮等)进行二次供气。
50.在轻型化航天器产品进行地面无应力装配工作或解锁分离试验中,轻型可抗偏载静压气浮滑轨32装置通常安装于球杆架或支撑架1下方,悬吊装配产品后进行调平,从而实现航天器产品的无应力装配及解锁分离试验,具体使用步骤如下:(1)工作人员搭建球杆架或装置支撑支架,将其固定并进行基本调平;(2)将该轻型可抗偏载静压气浮滑轨32安装于支撑架1下方,进行全面通气,其中安装在支架下方通过固定块325实现,通气通过外接供气设备连通气嘴326实现;(3)检查滑轴322的浮起工作状态,将需要进行装配的航天器产品悬挂至挂板324,并通过悬吊绳上的高度调节装置调节至相应高度;(4)放开航天器产品使其处于自由悬挂状态,观察滑轴322的滑动方向,将通过调节悬吊绳的长度进行装置调平;(5)
开展天器产品地面无应力装配工作或解锁分离试验。
51.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。