技术特征:
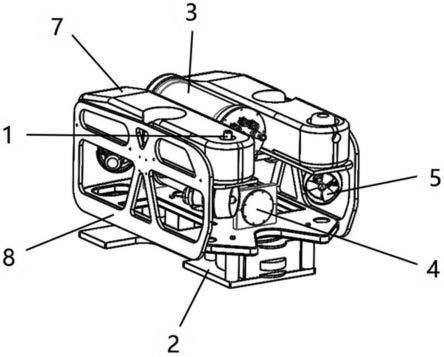
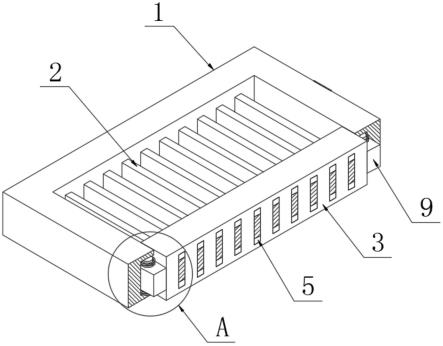
1.基于多声学设备协同作业的坝面检测水下机器人系统,其特征在于:它包括水下声学定位设备、主控舱(3)、连接于主控舱(3)的电池舱(4)、安装于主控舱(3)及电池舱(4)的水下推进器(5)、连接于主控舱(3)与电池舱(4)的水下机器人机身架(8)、安装于水下机器人机身架(8)的水下声学探测设备(2);所述水下声学定位设备包括安装于水下机器人浮力面板(7)的水下声学定位发声装置(1)和连接于岸基控制台并布放于水中的水下声学定位收声装置(6);所述电池舱(4)内设有储能模块。2.根据权利要求1所述的基于多声学设备协同作业的坝面检测水下机器人系统,其特征在于:所述水下声学定位设备和水下声学探测设备(2)均为模块化设计,且二者均具有完备的浮力状态。3.根据权利要求1所述的基于多声学设备协同作业的坝面检测水下机器人系统,其特征在于:所述水下声学定位发声装置(1)安装于水下机器人浮力面板(7)前端上部。4.根据权利要求1所述的基于多声学设备协同作业的坝面检测水下机器人系统,其特征在于:所述水下声学定位收声装置(6),包括声头(623)、主固定块(61)、连接于主固定块(61)并用以固定声头的伸缩固定架(62),以及便于固定水下声学定位收声装置(6)的线材的安装结构;所述水下声学定位收声装置(6)能够调整主固定块(61)与声头(623)的间距;伸缩固定架(62)与主固定块(61)通过螺丝锁紧方式固定。5.根据权利要求4所述的基于多声学设备协同作业的坝面检测水下机器人系统,其特征在于:所述声头(623)设有若干个,通过所述伸缩固定架(62)及主固定块(61)来调节不同声头(623)的距离;所述伸缩固定架(62)包括伸缩节(622)及伸缩锁紧槽(621),每个伸缩固定架(62)设有若干根长度相同但粗细不同的伸缩节(622),伸缩节(622)为一级一级嵌套结构,每段伸缩节(622)的结构外形由尾部到头部也呈现由粗到细的变化,伸缩节(622)的每节头部开设有伸缩锁紧槽(621),通过旋转以卡紧;所述伸缩固定架(62)均为垂直设置,分别能朝不同方向伸展。6.根据权利要求1所述的基于多声学设备协同作业的坝面检测水下机器人系统,其特征在于:所述水下推进器(5)为若干个朝向不同方向水下推进器(5),所述水下推进器(5)的布局方式为矢量布局,在垂直方向和水平方向呈角度的对称分布,以保证水下作业时多自由度方向移动及控制。7.根据权利要求1所述的基于多声学设备协同作业的坝面检测水下机器人系统,其特征在于:所述水下声学探测设备(2)包括三维成像声呐(21),通过浮力外壳(26)、三维成像声呐底部隔板(25)及三维成像声呐固定螺柱(23)组成的连接结构安装于水下机器人底部。8.根据权利要求7所述的基于多声学设备协同作业的坝面检测水下机器人系统,其特征在于:所述三维成像声呐(21)位于水下机器人机身架底板(24)与三维成像声呐底部隔板(25)之间,所述浮力外壳(26)与三维成像声呐(21)形状匹配,三维成像声呐(21)包裹于浮力外壳(26)内部,浮力外壳(26)及三维成像声呐底部隔板(25)上设有对应的三维成像声呐固定孔(22),通过螺栓将三维成像声呐(21)固定于三维成像声呐底部隔板(25),组合固定后的三维成像声呐(21)、浮力外壳(26)及三维成像声呐底部隔板(25)通过三维成像声呐固定螺柱(23)连接于水下机器人机身架底板(24)。9.根据权利要求8所述的基于多声学设备协同作业的坝面检测水下机器人系统,其特征在于:所述三维成像声呐底部隔板(25)与水下机器人机身架底板(24)形状相匹配,所述
三维成像声呐固定螺柱(23)布置于水下机器人机身架底板(24)和三维成像声呐底部隔板(25)四周,三维成像声呐固定螺柱(23)为双头螺纹锁紧结构,以使水下机器人机身架底板(24)和三维成像声呐底部隔板(25)对接后锁紧,保证连接强度及稳定性。
技术总结
本实用新型公开了基于多声学设备协同作业的坝面检测水下机器人系统,它包括水下声学定位设备、主控舱、连接于主控舱的电池舱、安装于主控舱及电池舱的水下推进器、连接于主控舱与电池舱的水下机器人机身架、安装于水下机器人机身架的水下声学探测设备;所述水下声学定位设备包括安装于水下机器人浮力面板的水下声学定位发声装置和连接于岸基控制台并布放于水中的水下声学定位收声装置;所述水下声学定位设备和水下声学探测设备均为模块化设计,且二者均具有完备的浮力状态;所述电池舱内设有储能模块。本实用新型通过将水下声学定位设备和水下声学探测设备集成于水下机器人系统,协同作业,达到高效的坝面检测目的。达到高效的坝面检测目的。达到高效的坝面检测目的。
技术研发人员:张涛 王浩军 肖赞 刘勤功 徐辉 沈晶鑫 沈杰 滕杜彪 许成就 陈家栋 张华英 韩冰 吴桐树 孙鹏
受保护的技术使用者:浙江省水利水电勘测设计院
技术研发日:2021.12.20
技术公布日:2022/6/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。