技术特征:
1.一种行人航迹推算质量控制方法,其特征在于,包括如下步骤:步骤1,结合手机内置三轴陀螺仪和三轴加速度数据,结合惯性导航陀螺积分原理,运用低动态状态下检测重力加速度,得到当地坐标系下东方向和北方向角速度测量值,以此得到手机动态性指标;步骤2,结合手机内置三轴加速度数据,运用滑动窗口平滑加速度数据;运用步频检测方法探测行人行走步伐时刻,并记录每步间隔内的平滑加速度数据;步骤3,结合每步间隔内的平滑加速度数据,运用动态时间规整算法dtw计算相邻步伐间加速度数据的相似性,以此得到行人运动连续性指标;步骤4,结合手机动态性指标和行人运动连续性指标,得到行人航迹推算质量控制指标,为pdr递推质量提供依据;所述行人航迹推算质量控制指标即为手机动态性指标与行人运动连续性指标的乘积;步骤5,结合基于pdr的多源融合卡尔曼系统,通过行人航迹推算质量控制指标,动态调整多源融合卡尔曼系统时间更新的过程噪声,以此实现对行人航迹推算的质量控制。2.如权利要求1所述的一种行人航迹推算质量控制方法,其特征在于:步骤1的具体实现方式如下;运用三轴陀螺仪与三轴加速度数据,判断手机是否属于低动态状态,如公式1所示;在低动态状态下运用三轴加速度测量值实时校正陀螺积分系统;基于陀螺积分系统,计算当地坐标系下东方向角速度测量值和北方向角速度测量值,得到手机动态性指标,如公式2所示;示;其中,m表示低动态状态判断窗口数目,g表示当地重力加速度,f
i
和ω
i
分别表示第i个三轴加速度测量幅值与三轴陀螺仪测量幅值,σ
f
和σ
ω
分别是加速度计噪声测量值和陀螺仪传感器噪声测量值,γ表示低动态状态判断阈值,ω
e
表示当地坐标系下东方向角速度测量值,ω
n
表示当地坐标系下北方向角速度测量值,a
indicator
表示手机动态性指标。3.如权利要求1所述的一种行人航迹推算质量控制方法,其特征在于:步骤2的具体实现方式如下;结合手机内置三轴加速度数据,得到加速度幅值结果,并对加速度幅值结果进行滑动窗口平滑,如公式3-4所示;运用步频检测方法得到行人步伐时刻,记录该步伐内的平滑加速度数据,如公式5所示;速度数据,如公式5所示;速度数据,如公式5所示;其中,t
i
表示采样时间,acc
x
、acc
y
、acc
z
表示三轴加速度原始测量值,表示t
i
时刻下加速度幅值,表示平滑后的加速度幅值结果,n表示该步伐内的平滑加速度数据。
4.如权利要求3所述的一种行人航迹推算质量控制方法,其特征在于:步骤3的具体实现方式如下;结合步骤2得到的相邻步伐间平滑加速度数据,运用动态时间规整算法计算对应步伐加速度数据相似性,如公式6-8所示;8所示;b
indicator
=dtw(n,m)
ꢀꢀꢀꢀ
(8)其中,n表示第n步伐内的平滑加速度数据,m表示第m步伐内的平滑加速度数据,dtw表示动态时间规整算法,b
indicator
表示行人运动连续性指标。5.如权利要求1所述的一种行人航迹推算质量控制方法,其特征在于:步骤4的具体实现方式如下;结合步骤1得到的手机动态性指标与步骤3得到的行人运动连续性指标,得到行人航迹推算质量控制指标,如公式9所示,根据行人航迹推算质量控制指标数值大小,为pdr递推质量提供数值判断依据;c
indicator
=a
indicator
·
b
indicator
ꢀꢀꢀꢀ
(9)其中,a
indicator
表示手机动态性指标,b
indicator
表示行人运动连续性指标,c
indicator
表示行人航迹推算质量控制指标。6.如权利要求1所述的一种行人航迹推算质量控制方法,其特征在于:步骤5的具体实现方式如下;基于pdr的多源融合卡尔曼系统状态量设置如下:x=[e,n,v,θ,ω]
t
ꢀꢀꢀꢀꢀ
(10)其中,x表示待估计的状态量,e和n分别表示东方向和北方向的当地坐标,v表示行人步行速度,θ和ω分别表示航向角度与角速度;基于pdr的多源融合卡尔曼系统是将pdr和外部其他源结果一起融合,将pdr和外部其他源结果按一定比例加权得到最后结果,该系统的时间更新过程如下:其中,下标k表示时刻,上标-和 分别表示状态量的预测值与更新值,δt表示时间间隔,w
1-w5均表示噪声;结合行人航迹推算质量控制指标c
indicator
,实时控制系统的过程噪声矩阵q,即q=c
indicator
×
q0,其中q0为原始系统过程噪声矩阵,c
indicator
表示行人航迹推算质量控制指标,当行人行走不连续或手机动态性大时,此时系统依赖于外部其他源进行定位;当行人行走连续且手机动态性小时,此时增加pdr在融合中的权重,最终提供系统的稳健性。7.如权利要求6所述的一种行人航迹推算质量控制方法,其特征在于:外部其他源包括
wifi、蓝牙指纹结果。
技术总结
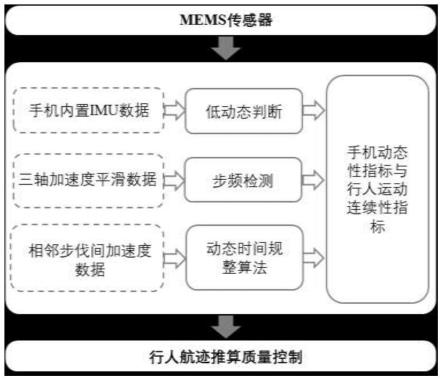
本发明提供一种行人航迹推算质量控制方法,包括如下步骤:首先,结合手机内置IMU数据测量值,进行低动态判断,运用低动态状态下加速度量测值校正陀螺积分系统,得到当地坐标系下的加速度测量值及手机动态性指标;其次,结合三轴加速度平滑数据和步频检测方法得到的行人步伐时刻,记录当前步伐内平均加速度数据;再次,结合相邻步伐间加速度数据,运用动态时间规整算法,得到行人运动连续性指标;最后结合手机动态性指标与行人运动连续性指标,得到行人航迹推算质量控制指标,为PDR递推质量提供数值依据,实现PDR递推精度的可靠预测。本发明有效结合手机动态性与行人运动连续性信息,为行人航迹推算质量提供判断依据。为行人航迹推算质量提供判断依据。为行人航迹推算质量提供判断依据。
技术研发人员:柳景斌 杨盛 龚晓东 黄格格 赵智博 白羽 刘德龙
受保护的技术使用者:武汉大学
技术研发日:2022.02.23
技术公布日:2022/6/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。