1.本发明属于室内定位技术领域,具体涉及一种行人航迹推算质量控制方法。
技术背景
2.基于手机的室内定位技术作为万物互联的重要一环,已经应用在人们的日常生活中,例如在商场、停车场、火车站等。行人航迹推算(pedestrian dead reckoning,pdr)无需安装外部设备,已经成为了手机室内定位主要技术之一。它主要基于行人行走周期性特点进行定位,主要包括三个步骤:步伐检测、步长估计、航向估计。与传统捷联惯性导航不一样的是,它不通过对加速度计测量值进行两次积分得到位置,更适合于低精度的惯性测量单元传感器(inertial measurement unit,imu)。然而,由于行人行走的复杂性与任意性,基于手机的pdr步伐检测对行人行走动作敏感。行人运动方向与手机航向方向存在安装角误差,且在行进过程中安装角度会发生变化,这将影响pdr实际应用中的可靠性与稳定性。
3.为了提高基于手机的pdr可靠性,最常用的方法一方面是增加pdr步伐检测的复杂性,另一方面是通过主成分分析方法(principal component analysis,pca)实时估计行人运动方向。但在实际操作时,由于行人运动的随意性与行人携带手机方式的易变性,单独运行pdr很难获得稳定可靠的定位结果。因此,研究如何可靠控制pdr递推质量,将具有重要应用价值与意义。
技术实现要素:
4.为了解决上述问题,本发明提供一种行人航迹推算质量控制方法。所述方法以智能手机为平台,智能结合内置加速度计、陀螺仪传感器,在行人行进过程中运用实时航向可靠估计、加速度滑动窗口分析,得到手机动态性指标与行人运动连续性指标。结合这两种指标,为pdr递推质量提供判断基准。此方法也适用于室内定位其他平台的应用。
5.进一步地,所述方法具体包括以下步骤:
6.步骤1、结合手机内置三轴陀螺仪和三轴加速度数据,结合惯性导航陀螺积分原理,运用低动态状态下检测重力加速度,得到当地坐标系下东方向和北方向角速度测量值,以此得到手机动态性指标;
7.步骤2、结合手机内置三轴加速度数据,运用滑动窗口平滑加速度数据;运用步频检测方法探测行人行走步伐时刻,并记录每步间隔内的平滑加速度数据;
8.步骤3、结合每步间隔内的平滑加速度数据,运用动态时间规整算法(dynamic time warping,dtw)计算相邻步伐间加速度数据的相似性,以此得到行人运动连续性指标;
9.步骤4、结合手机动态性指标和行人运动连续性指标,得到行人航迹推算质量控制指标,为pdr递推质量提供依据。
10.步骤5,结合基于pdr的多源融合系统,通过行人航迹推算质量控制指标,动态调整融合系统时间更新的过程噪声,以此实现对行人航迹推算的质量控制。将质量控制指标运用至基于pdr的多源融合系统时间更新过程噪声中,以此提高融合系统的稳健性与可靠性。
11.进一步地,步骤1具体为:运用三轴陀螺仪与三轴加速度数据,判断手机是否属于低动态状态,如公式1所示;在低动态状态下运用三轴加速度测量值实时校正陀螺积分系统;基于陀螺积分系统,计算当地坐标系下东方向角速度测量值和北方向角速度测量值,得到手机动态性指标,如公式2所示。
[0012][0013][0014]
其中,m表示低动态状态判断窗口数目,g表示当地重力加速度,fi和ωi分别表示第i个三轴加速度测量幅值与三轴陀螺仪测量幅值,σf和σ
ω
分别是加速度计噪声测量值和陀螺仪传感器噪声测量值,γ表示低动态状态判断阈值,ωe表示当地坐标系下东方向角速度测量值,ωn表示当地坐标系下北方向角速度测量值,a
indicator
表示手机动态性指标。
[0015]
进一步地,步骤2具体为:结合手机内置三轴加速度数据,得到加速度幅值结果,并对加速度幅值结果进行滑动窗口平滑,如公式3-4所示;运用步频检测方法得到行人步伐时刻,记录该步伐内的平滑加速度数据,如公式5所示。
[0016][0017][0018][0019]
其中,ti表示采样时间,acc
x
、accy、accz表示三轴加速度原始测量值,表示ti时刻下加速度幅值,表示平滑后的加速度幅值结果,n表示该步伐内的平滑加速度数据。
[0020]
进一步地,步骤3具体为:结合步骤2得到的相邻步伐间平滑加速度数据,运用动态时间规整算法计算对应步伐加速度数据相似性,如公式6-8所示。
[0021][0022][0023]bindicator
=dtw(n,m)
ꢀꢀ
(8)
[0024]
其中,n表示第n步伐内的平滑加速度数据,m表示第m步伐内的平滑加速度数据,dtw表示动态时间规整算法,b
indicator
表示行人运动连续性指标。
[0025]
进一步地,步骤4具体为:结合步骤1得到的手机动态性指标与步骤3得到的行人运动连续性指标,得到行人航迹推算质量控制指标,如公式9所示。根据行人航迹推算质量控制指标数值大小,为pdr递推质量提供数值判断依据。
[0026]cindicator
=a
indicator
·bindicator
ꢀꢀ
(9)
[0027]
其中,a
indicator
表示手机动态性指标,b
indicator
表示行人运动连续性指标,c
indicator
表示行人航迹推算质量控制指标。
[0028]
进一步的,基于pdr的多源融合卡尔曼系统状态量设置如下:
[0029]
x=[e, n, v, θ, ω]
t
ꢀꢀ
(10)
[0030]
其中,x表示待估计的状态量,e和n分别表示东方向和北方向的当地坐标,v表示行人步行速度,θ和ω分别表示航向角度与角速度;
[0031]
基于pdr的多源融合卡尔曼系统是将pdr和外部其他源结果一起融合,将pdr和外部其他源结果按一定比例加权得到最后结果,该系统的时间更新过程如下:
[0032][0033]
其中,下标k表示时刻,上标-和 分别表示状态量的预测值与更新值,δt表示时间间隔,w
1-w5均表示噪声;
[0034]
结合行人航迹推算质量控制指标c
indicator
,实时控制系统的过程噪声矩阵q,即q=c
indicator
×
q0,其中q0为原始系统过程噪声矩阵,c
indicator
表示行人航迹推算质量控制指标,当行人行走不连续或手机动态性大时,此时系统更多依赖于外部其他源定位;当行人行走连续且手机动态性小时,此时pdr的递推性能将会在融合系统中增强,最终提供系统的稳健性。
[0035]
本发明的有益效果如下:
[0036]
1)针对基于手机的行人航迹方法,提出了一种行人航迹推算质量控制方法,有效结合手机动态性与行人运动连续性信息,为行人航迹推算质量提供判断依据。
[0037]
2)结合三轴加速度测量值在当地坐标系下东方向与北方向角速度测量值,提出了手机动态性检测依据。
[0038]
3)结合行人运动步伐间相邻加速度测量值间的相似性,运用动态时间规整算法,提出了行人运动连续性检测依据。
附图说明
[0039]
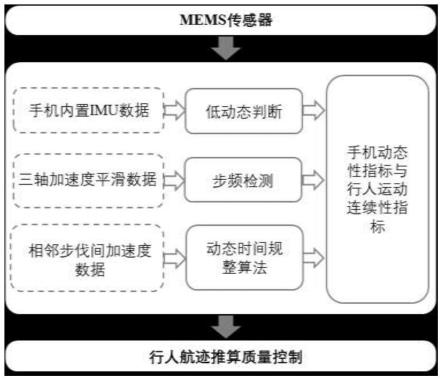
图1为本发明一种行人航迹推算质量控制方法的流程图。
具体实施方式
[0040]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细描述。应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。相反,本发明涵盖任何由权利要求定义的在本发明的精髓和范围上做的替代、修改、等效方法以及方案。进一步,为了使公众对本发明有更好的了解,在下文对本发明的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本发明。
[0041]
下面结合附图和具体实施例对本发明作进一步说明,但不作为对本发明的限定。下面为本发明的举出最佳实施例:
[0042]
如图1所示,本发明提供一种行人航迹推算质量控制方法,包括如下步骤:首先,结合手机内置imu数据测量值,进行低动态判断,运用低动态状态下加速度量测值校正陀螺积分系统,得到当地坐标系下的加速度测量值及手机动态性指标;其次,结合三轴加速度平滑数据和步频检测方法得到的行人步伐时刻,记录当前步伐内平均加速度数据;再次,结合相邻步伐间加速度数据,运用动态时间规整算法,得到行人运动连续性指标;最后结合手机动态性指标与行人运动连续性指标,得到行人航迹推算质量控制指标,为pdr递推质量提供数值依据,实现pdr递推精度的可靠预测。
[0043]
进一步的,所述方法具体包括以下步骤:
[0044]
步骤1、结合手机内置三轴陀螺仪和三轴加速度数据,结合惯性导航陀螺积分原理,运用低动态状态下检测重力加速度,得到当地坐标系下东方向和北方向角速度测量值,以此得到手机动态性指标;
[0045]
步骤2、结合手机内置三轴加速度数据,运用滑动窗口平滑加速度数据;运用步频检测方法探测行人行走步伐时刻,并记录每步间隔内的平滑加速度数据;
[0046]
步骤3、结合每步间隔内的平滑加速度数据,运用动态时间规整算法(dynamic time warping,dtw)计算相邻步伐间加速度数据的相似性,以此得到行人运动连续性指标;
[0047]
步骤4、结合手机动态性指标和行人运动连续性指标,得到行人航迹推算质量控制指标,为pdr递推质量提供依据。
[0048]
步骤5,结合基于pdr的多源融合卡尔曼系统,通过行人航迹推算质量控制指标,动态调整多源融合卡尔曼系统时间更新的过程噪声,以此实现对行人航迹推算的质量控制。
[0049]
进一步地,步骤1具体为:运用三轴陀螺仪与三轴加速度数据,判断手机是否属于低动态状态,如公式1所示;在低动态状态下运用三轴加速度测量值实时校正陀螺积分系统;基于陀螺积分系统,计算当地坐标系下东方向角速度测量值和北方向角速度测量值,得到手机动态性指标,如公式2所示。
[0050][0051][0052]
其中,m表示低动态状态判断窗口数目,g表示当地重力加速度,fi和ωi分别表示第i个三轴加速度测量幅值与三轴陀螺仪测量幅值,σf和σ
ω
分别是加速度计噪声测量值和陀螺仪传感器噪声测量值,γ表示低动态状态判断阈值,ωe表示当地坐标系下东方向角速度测量值,ωn表示当地坐标系下北方向角速度测量值,a
indicator
表示手机动态性指标。
[0053]
进一步地,步骤2具体为:结合手机内置三轴加速度数据,得到加速度幅值结果,并对加速度幅值结果进行滑动窗口平滑,如公式3-4所示;运用步频检测方法得到行人步伐时刻,记录该步伐内的平滑加速度数据,如公式5所示。
[0054][0055][0056]
[0057]
其中,ti表示采样时间,acc
x
、accy、accz表示三轴加速度原始测量值,表示ti时刻下加速度幅值,表示平滑后的加速度幅值结果,n表示该步伐内的平滑加速度数据。
[0058]
进一步地,步骤3具体为:结合步骤2得到的相邻步伐间平滑加速度数据,运用动态时间规整算法计算对应步伐加速度数据相似性,如公式6-8所示。
[0059][0060][0061]bindicator
=dtw(n,m)
ꢀꢀ
(8)
[0062]
其中,n表示第n步伐内的平滑加速度数据,m表示第m步伐内的平滑加速度数据,dtw表示动态时间规整算法,b
indicator
表示行人运动连续性指标。
[0063]
进一步地,步骤4具体为:结合步骤1得到的手机动态性指标与步骤3得到的行人运动连续性指标,得到行人航迹推算质量控制指标,如公式9所示。根据行人航迹推算质量控制指标数值大小,为pdr递推质量提供数值判断依据。
[0064]cindicator
=a
indicator
·bindicator
ꢀꢀ
(9)
[0065]
其中,a
indicator
表示手机动态性指标,b
indicator
表示行人运动连续性指标,c
indicator
表示行人航迹推算质量控制指标。
[0066]
进一步的,步骤3中多源融合卡尔曼系统作用是实时融合多种定位源,检测粗差剔除大噪声,得到稳定可靠的定位结果,步骤5中基于pdr的多源融合卡尔曼系统状态量设置如下:
[0067]
x=[e, n, v, θ, ω]
t
ꢀꢀ
(10)
[0068]
其中,x表示待估计的状态量,e和n分别表示东方向和北方向的当地坐标,v表示行人步行速度,θ和ω分别表示航向角度与角速度;
[0069]
该系统的时间更新过程如下:
[0070][0071]
其中,下标k表示时刻,上标-和 分别表示状态量的预测值与更新值,δt表示时间间隔,w
1-w5均表示噪声。
[0072]
结合行人航迹推算质量控制指标c
indicator
,实时控制融合滤波系统的过程噪声矩阵q,即q=c
indicator
×
q0(q0为原始系统过程噪声矩阵,q0通过噪声协方差矩阵进行表示)。当行人行走不连续或手机动态性大时,此时融合系统更多依赖于外部其他源(如wifi或蓝牙指纹结果)定位;当行人行走连续且手机动态性小时,此时pdr的递推性能将会在融合系统中增强,融合系统是将pdr和其他源结果一起融合,可简单理解为将各源结果按一定比例加
权得到最后结果,当手机动态性小时,认为pdr的可靠性高些,进而pdr在融合中的权重大一些,最终提供融合系统的稳健性。
[0073]
以上所述的实施例,只是本发明较优选的具体实施方式的一种,本领域的技术人员在本发明技术方案范围内进行的通常变化和替换都应包含在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。